Clear Sky Science · de
Trajektoriematrix-geführte optimale Auslegung eines nicht-runden Zahnradgetriebes für einen Auswurfmechanismus von Reissetzlingsballen
Warum das Werfen winziger Pflanzen wichtig ist
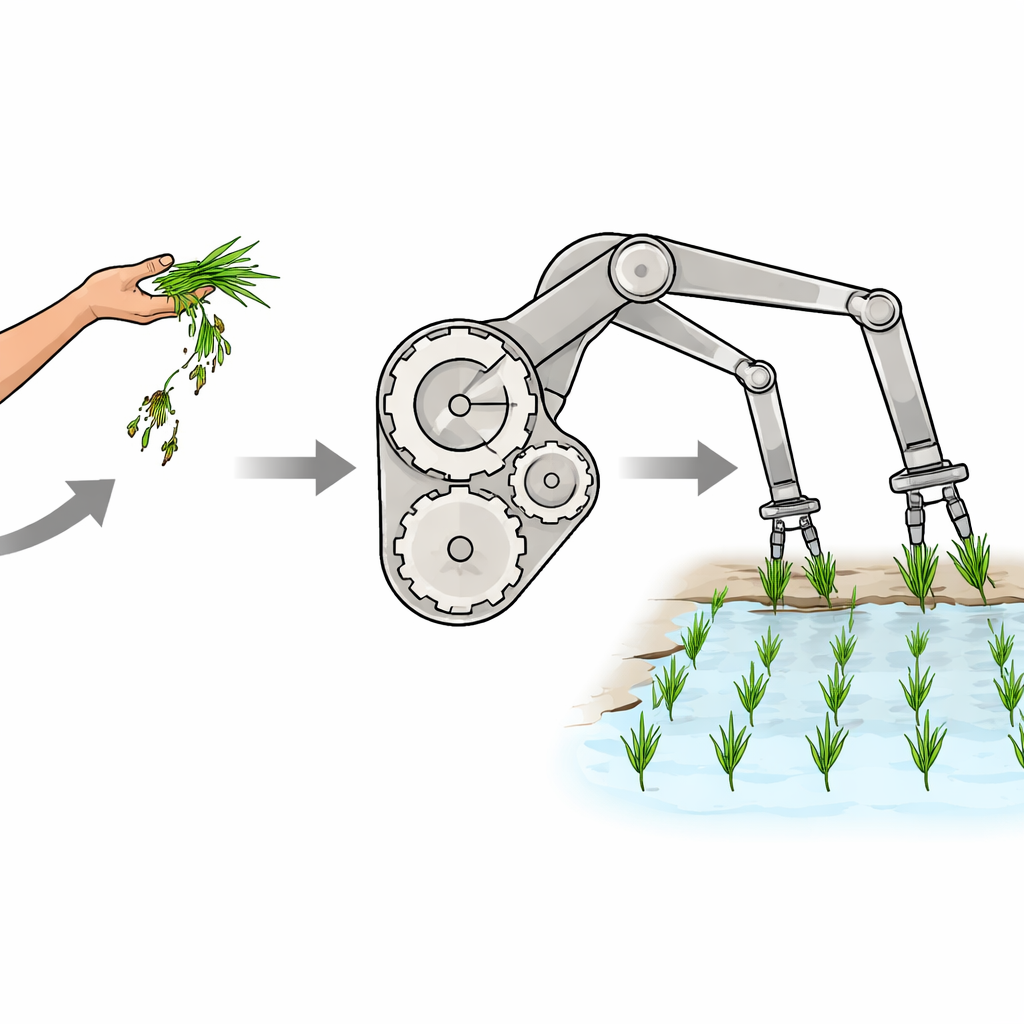
Reis von Hand zu pflanzen ist langsam, aber schonend für die jungen Pflanzen und unterstützt ihre schnelle Erholung und gesundes Wachstum. Mit wachsender Feldgröße und steigenden Arbeitskosten suchen Ingenieure nach Maschinen, die Reissetzlinge mit der gleichen Sorgfalt und Präzision wie ein geübter Arbeiter pflanzen können. Diese Studie beschreibt einen neuen Pflanzmechanismus, der die Bewegung des menschlichen Arms nachahmt und mithilfe eines ausgeklügelten Zahnradsystems sowie einer mathematischen „Landkarte“ der Bewegung Reissetzlingsballen genau und schonend ins Feld wirft.
Von der Hand des Bauern zum Roboterarm
Die Forscher begannen mit einer einfachen Frage: Was genau macht der Arm einer Person, wenn sie einen Reissetzling aufnimmt und wirft? Mit einer Hochgeschwindigkeitskamera zeichneten sie Hand und Ellenbogen eines Arbeiters mit 300 Bildern pro Sekunde auf. Sie zerlegten die Bewegung in Phasen: Greifen des Setzlings, Herausziehen aus dem Tablett, Transport zum Zielpunkt, Loslassen, sodass er vorwärts fliegt, und Zurückführen der Hand zur Ausgangsposition. Beim Nachzeichnen ergab sich ein markanter, geschlossener Pfad, den die Autoren als „Pinguin-förmig“ beschreiben, wobei sich der Handwinkel so ändert, dass der Setzling weitgehend aufrecht bleibt und Biegen oder Verdrehen minimiert wird.
Natürliche Bewegung in einen Maschinenpfad überführen
Um diese Bewegung in einer Maschine nachzubilden, behandelte das Team den Arm als einfache Zweigelenkstruktur, die an Schulter und Ellenbogen schwenkt. Ingenieursprachlich ist dies ein offener Kettenmechanismus mit zwei Gelenken; die grundlegende Idee ist jedoch einfach: Ein Segment schwingt vom Körper, das zweite schwingt vom ersten, und gemeinsam zeichnen sie denselben Handpfad. Die Schwierigkeit besteht darin, dass ein derartiges System viele Bewegungsfreiheiten hat, von denen die meisten für die Setzlinge ungeeignet wären. Die Autoren lösten das Problem mit einem nicht-runden Zahnradgetriebe — Zahnrädern mit nicht-kreisförmigem Umriss — das die Gelenkrotationen steuert und das Armende dazu zwingt, nahezu den menschlich inspirierten Pfad zu verfolgen.
Daten als Leitfaden für die Konstruktion
Die Auslegung eines solchen Mechanismus besteht nicht nur aus dem freien Zeichnen von Kurven. Es gibt Dutzende Entwurfsparameter, etwa die Form der Zahnräder, ihre Lagerung und die Armlängen. Diese Faktoren interagieren komplex. Um damit umzugehen, entwickelten die Autoren eine neue Darstellung der Bewegung als „Trajektoriematrix“. Zunächst standardisierten sie den idealen Handpfad — entfernten Effekte von Größe, Lage und Rotation — und legten ihn auf ein Raster. Rasterzellen, die vom Pfad durchlaufen wurden, wurden markiert, sodass die Bewegung zu einem Muster aus Null und Eins wurde. Dasselbe taten sie für viele mögliche Maschinenpfade über den gesamten Einstellbereich. Durch den Vergleich dieser Matrizen konnten sie schnell messen, wie gut ein Entwurf dem menschlichen Pfad entsprach, und diesen Wert nutzen, um die Optimierungssoftware zu einem insgesamt besten Ergebnis zu führen.
Konstruktion und Prüfung des Auswurfmechanismus
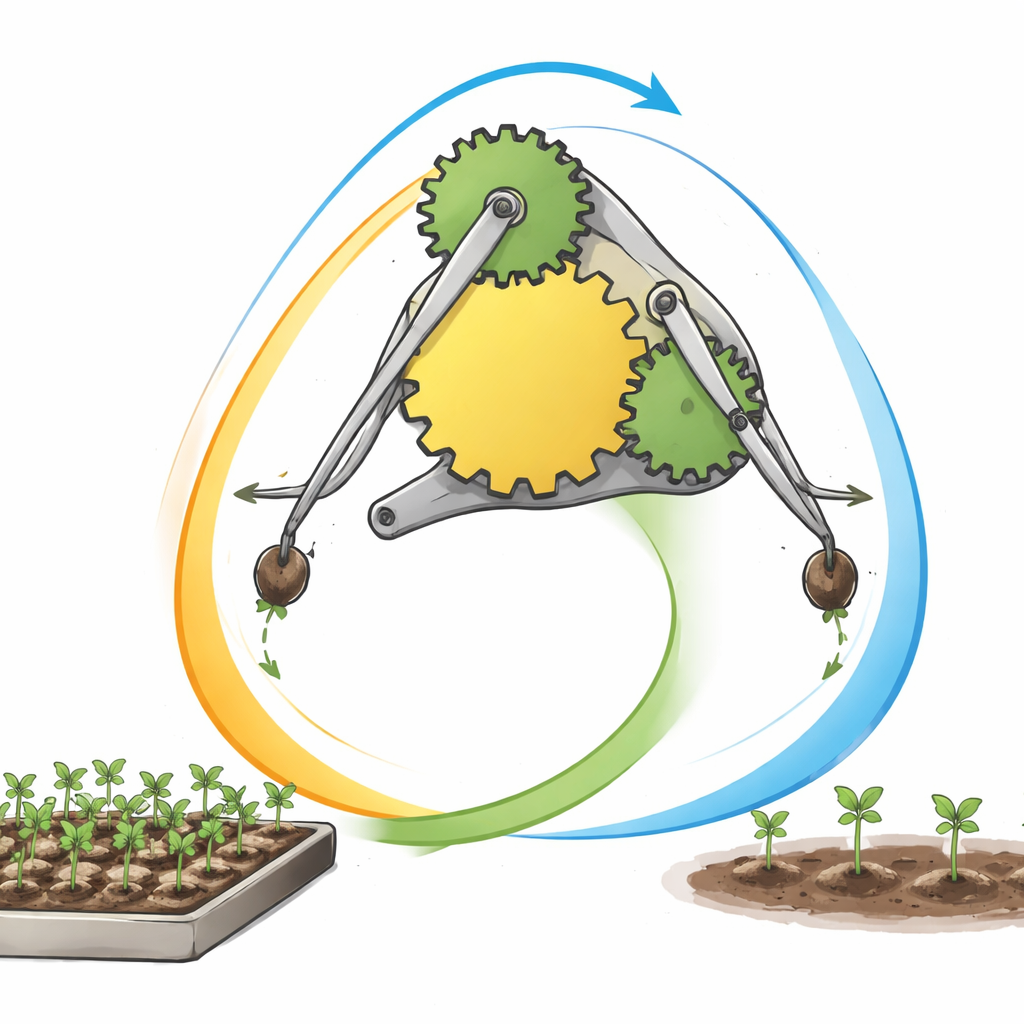
Mit den optimierten Parametern entwarfen die Forscher einen kompakten Mechanismus aus einem nicht-runden Zahnradpaar und zwei Setzarmern. Der Zentralträger und das nicht-runde Sonnenrad drehen sich zusammen, während zwei nicht-runde Planetenräder, jeweils an einem Aufnahmearm befestigt, entsprechend mitdrehen. Wenn sich der Träger dreht, folgt jeder Arm einem sorgfältig geformten Pfad: Er bewegt sich beim Greifen und Herausziehen des Setzlings langsam und nahezu gerade, schwingt dann in die Pflanzzone und richtet den Setzling allmählich auf, und schiebt ihn schließlich in eine Führvorrichtung, bevor er zur nächsten Aufnahme zurückkehrt. Computersimulationen zeigten, dass Pfad und Geschwindigkeit an der Armspitze dem Zieltrajektorie eng entsprachen und die Zug- und Druckkräfte fast in Wachstumsausrichtung des Setzlings lagen, wodurch Biegen und Bruch reduziert wurden.
Vom virtuellen Modell zur realen Bewegung
Das Team baute anschließend einen physischen Prototyp mit den optimierten Zahnradprofilen und Armlängen. Sie montierten das nicht-runde Zahnradgetriebe, die Nocken, das Gehäuse und die Arme auf einen Prüfstand und trieben den Mechanismus mit Arbeitsdrehzahlen an. Wieder nutzten sie eine Hochgeschwindigkeitskamera, um die tatsächliche Armbewegung aufzuzeichnen und mit dem geplanten Pfad zu vergleichen. Die reale Bewegung deckte sich stark mit der idealen Trajektorie, was bestätigte, dass das neue Design und die Trajektoriematrix-Optimierung wie beabsichtigt funktionierten. Die gemessenen Geschwindigkeiten beim Aufnehmen der Setzlinge waren moderat, was die Genauigkeit förderte und Schäden verringerte; die Schubbewegung war schneller, wodurch verhindert wurde, dass Setzlinge zurückgezogen oder gestört wurden.
Was das für Reisbauern bedeutet
Praktisch zeigt diese Arbeit, dass eine Maschine so gestaltet werden kann, dass sie die sorgfältige, gekrümmte Handbewegung geübter Reispflanzer nachahmt und dabei deutlich schneller und konstanter arbeitet als menschliche Arbeitskraft allein. Durch die Kombination eines nicht-runden Zahnradsystems mit einer datengetriebenen Bewegungsbeschreibung schufen die Autoren einen Verpflanzungsmechanismus, der Reissetzlinge effizient greifen, transportieren und platzieren kann, während sie aufrecht und weitgehend unbeschädigt bleiben. Für Landwirte könnte eine solche Technik höhere Erträge und zuverlässigeren Pflanzvorgang auf großen Flächen ermöglichen und die Vorteile des Handsatzens in ein vollständig mechanisiertes System überführen.
Zitation: Zhou, M., Wang, G., Xu, T. et al. Trajectory matrix-guided optimal design of non-circular gear train seedling throwing mechanism for rice pot seedlings. Sci Rep 16, 13180 (2026). https://doi.org/10.1038/s41598-026-43135-1
Schlüsselwörter: Reisverpflanzung, Setzlingwerfen, nicht-runde Zahnräder, Trajektorienoptimierung, Landmaschinen