Clear Sky Science · en
Trajectory matrix-guided optimal design of non-circular gear train seedling throwing mechanism for rice pot seedlings
Why tossing tiny plants matters
Planting rice by hand is slow, but it is gentle on young plants and helps them recover quickly and grow well. As farms get bigger and labor costs rise, engineers are searching for machines that can plant rice seedlings with the same care and precision as a skilled worker. This study describes a new planting mechanism that imitates the motion of the human arm while using a clever gear system and a mathematical "roadmap" of motion to throw rice pot seedlings accurately and gently into the field.
From farmer’s hand to robot arm
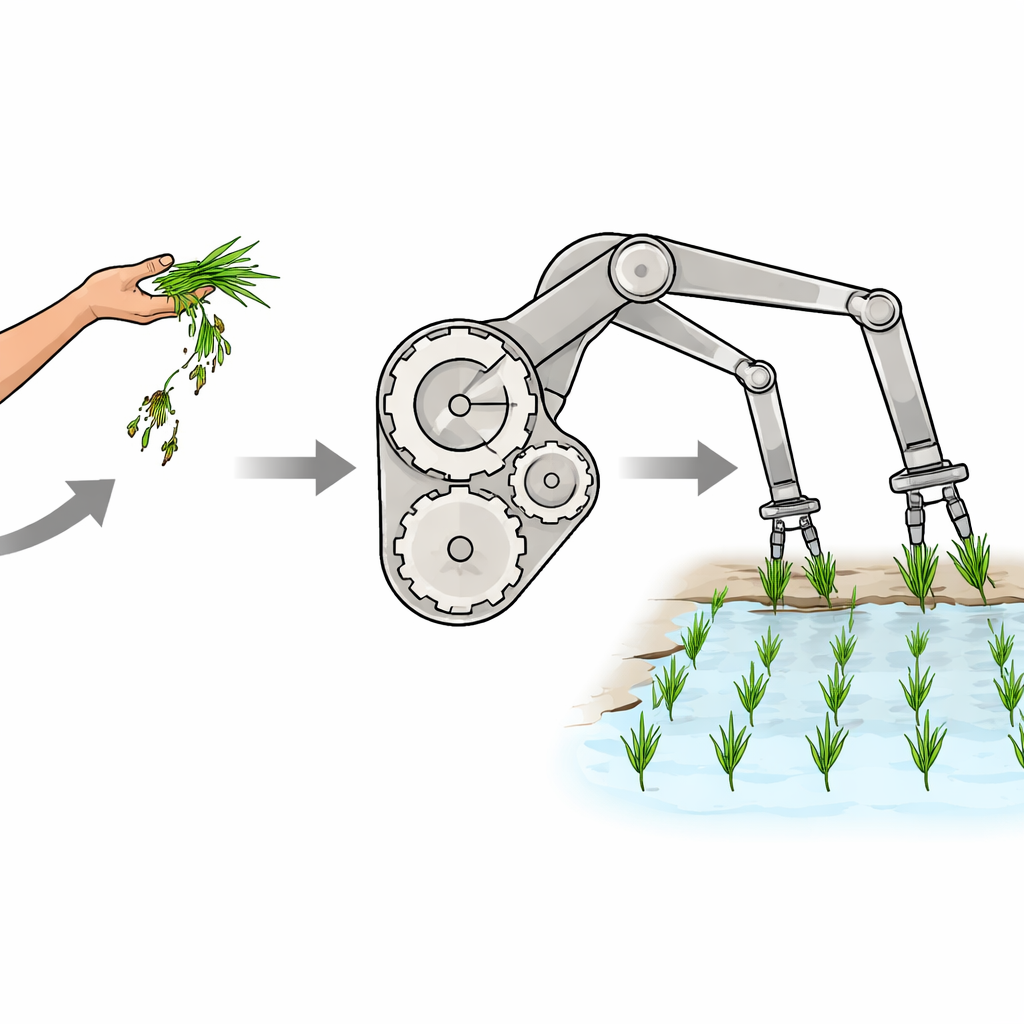
The researchers began by asking a simple question: what exactly does a person’s arm do when they pick up and throw a rice seedling? Using a high-speed camera, they recorded the hand and elbow of a worker moving 300 frames per second. They broke the action into stages: grasping the seedling, pulling it out of its tray, transporting it to the right spot, letting it go so it moves forward, and then returning the hand to start again. When these motions were traced, the hand followed a distinctive, looped path that the authors describe as "penguin-shaped," with the hand’s angle changing to keep the seedling mostly upright and to minimize bending or twisting.
Turning natural motion into a machine path
To capture this movement in a machine, the team treated the arm as a simple two-link structure that pivots at the shoulder and elbow. In engineering terms, this is a two-joint open-chain mechanism, but the key idea is straightforward: one segment swings from the body, and the second segment swings from the first, together tracing out the same kind of path the hand follows. The challenge is that, left on its own, such a system has many ways to move, most of which would not be good for the seedlings. The authors solved this by using a non-circular gear train—gears whose outlines are not round—to control how the joints rotate, forcing the end of the arm to trace something very close to the human-inspired path.
Letting data guide the design
Designing such a mechanism is not just about drawing curves by eye. There are dozens of design parameters, including how the gears are shaped, how they are mounted, and how long the arms are. These factors interact in complicated ways. To handle this, the authors created a new way to describe motion as a "trajectory matrix." First, they took the ideal hand path and standardized it—removing effects of size, position, and rotation—and then overlaid it on a grid. Grid cells that contained the path were marked, turning the motion into a pattern of zeros and ones. They did the same for many candidate machine paths across the full range of possible settings. By comparing these matrices, they could quickly measure how well any design matched the human-like path, and use that score to steer optimization software toward an overall best solution.
Building and testing the throwing mechanism
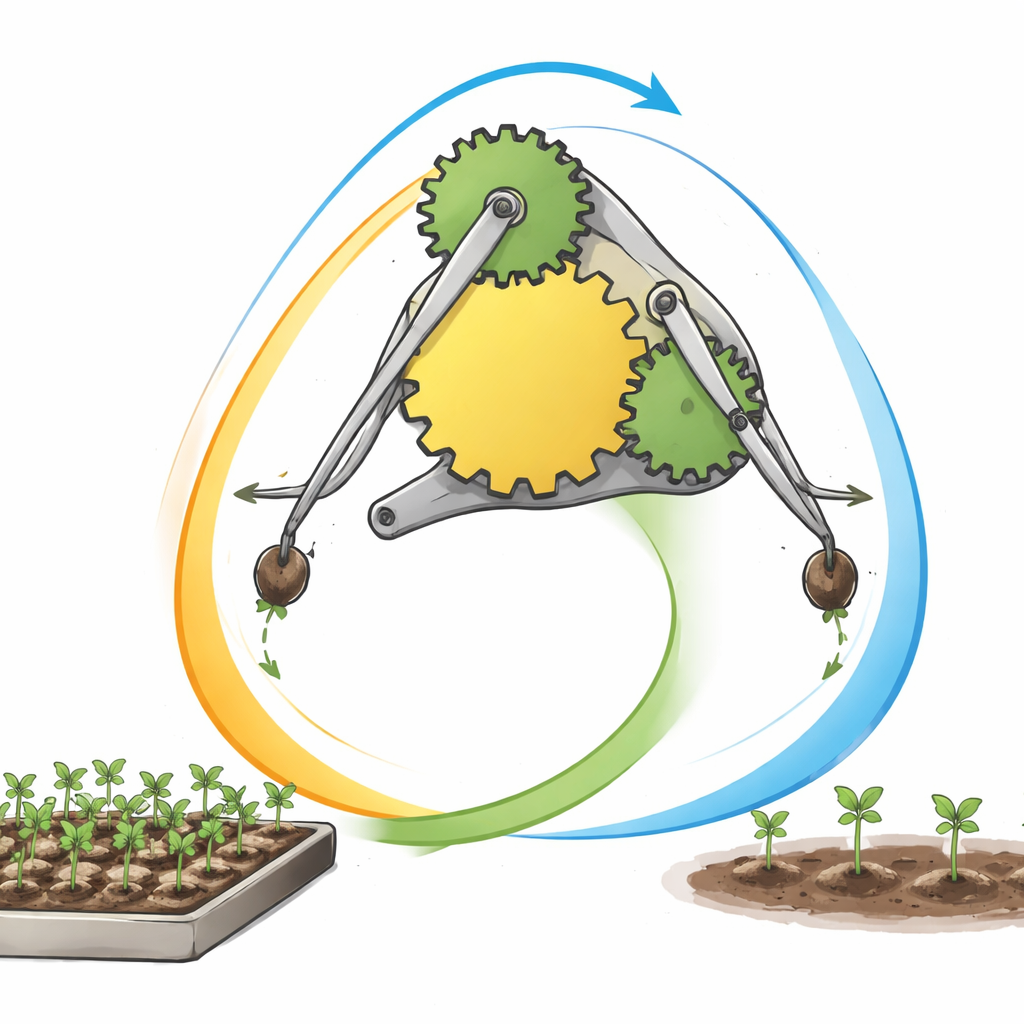
With the optimized parameters in hand, the researchers designed a compact mechanism consisting of a non-circular gear set and two seedling-picking arms. The central carrier and the non-circular sun gear rotate together, while two non-circular planetary gears, each fixed to a picking arm, turn in response. As the carrier turns, each arm follows a carefully shaped path: it moves slowly and almost straight while gripping and pulling the seedling, then swings it to the planting zone while gradually tipping it upright, and finally pushes it into a guiding device before returning for the next seedling. Computer simulations showed that the path and speed at the arm’s tip closely matched the target trajectory and kept the pulling and pushing forces nearly aligned with the seedling’s natural growth direction, reducing bending and breakage.
From virtual model to real-world motion
The team then built a physical prototype using the optimized gear profiles and arm dimensions. They assembled the non-circular gear train, cam, housing, and arms onto a test bench and drove the mechanism at working speeds. Again using a high-speed camera, they recorded the actual arm motion and compared it against the planned path. The real motion overlapped strongly with the ideal trajectory, confirming that the new design and the trajectory-matrix optimization method worked as intended. The measured speeds during seedling pickup were modest, helping accuracy and reducing damage, while the pushing motion was faster, helping prevent seedlings from being dragged backward or disturbed.
What this means for rice farmers
In practical terms, this work shows that a machine can be designed to mimic the careful, curved hand motion of skilled rice planters, while operating far faster and more consistently than human labor alone. By combining a non-circular gear system with a data-driven description of motion, the authors created a transplanting mechanism that can pick, carry, and place rice pot seedlings efficiently while keeping them upright and largely unharmed. For farmers, such technology could support higher yields and more reliable planting on large fields, bringing the benefits of hand transplanting into a fully mechanized system.
Citation: Zhou, M., Wang, G., Xu, T. et al. Trajectory matrix-guided optimal design of non-circular gear train seedling throwing mechanism for rice pot seedlings. Sci Rep 16, 13180 (2026). https://doi.org/10.1038/s41598-026-43135-1
Keywords: rice transplanting, seedling throwing, non-circular gears, trajectory optimization, agricultural machinery