Clear Sky Science · tr
Pirinç saksı fidelerinin atılmasına yönelik dairesel olmayan dişli takımı tohum atma mekanizmasının yörünge matrisi rehberliğinde optimal tasarımı
Neden küçük bitkileri fırlatmak önemli?
Pirinci elle dikmek yavaştır, ancak fideler için naziktir; bitkilerin hızla toparlanmasına ve iyi büyümesine yardımcı olur. Tarlalar büyüdükçe ve işçilik maliyetleri yükseldikçe mühendisler, becerikli bir işçinin gösterdiği özeni ve hassasiyeti sağlayabilen makineler arıyor. Bu çalışma, insan kolunun hareketini taklit eden, zekice bir dişli sistemi ve hareketin matematiksel bir “yol haritası”nı kullanarak pirinç saksı fidelerini doğru ve nazik şekilde tarlaya atan yeni bir dikim mekanizmasını tanımlıyor.
Çiftçinin elinden robot kola
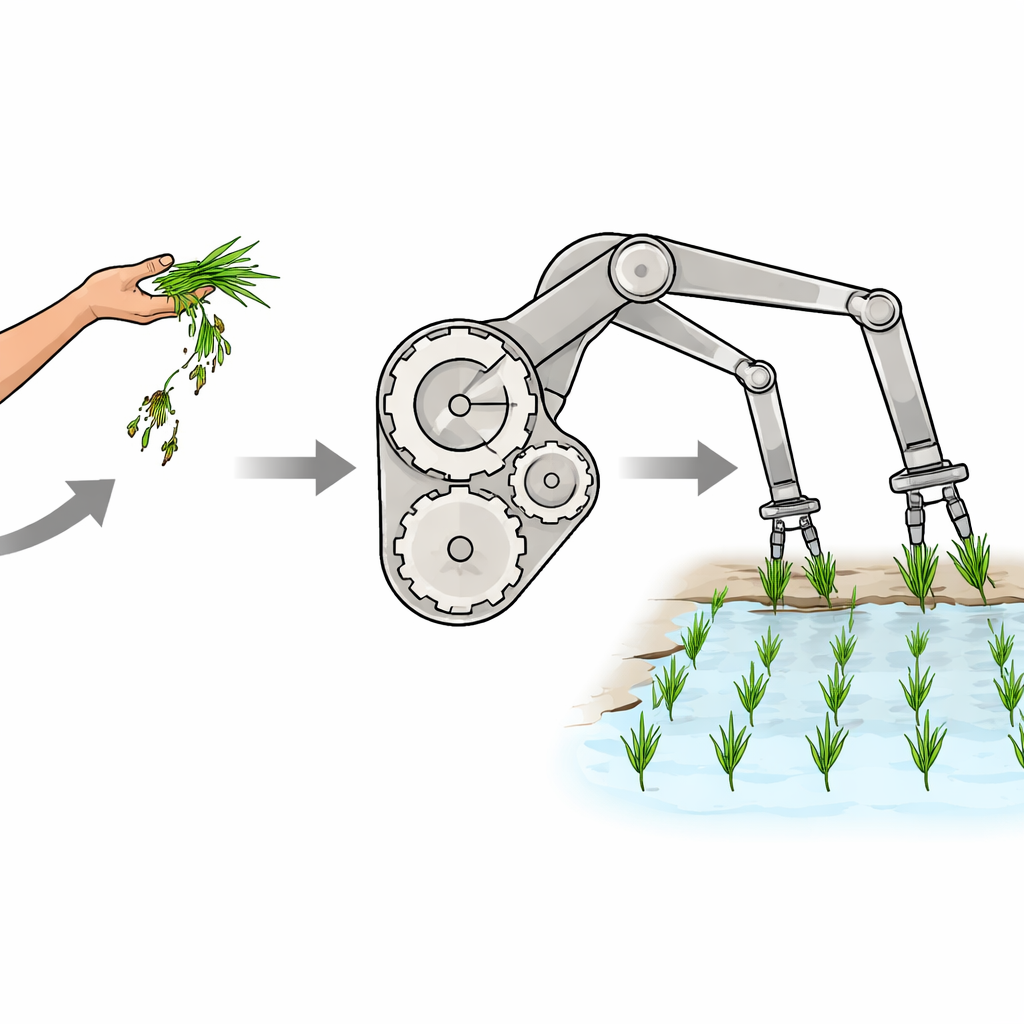
Araştırmacılar basit bir soruyla başladılar: bir kişi bir pirinç fidesini alıp attığında kol tam olarak ne yapar? Yüksek hızlı bir kamera kullanarak, bir işçinin elini ve dirseğini saniyede 300 kareyle kaydettiler. Hareketi kavrama, fidenin tepsisinden çekilmesi, doğru noktaya taşınması, bırakılarak öne doğru hareket ettirilmesi ve elin yeniden başlangıca dönmesi gibi aşamalara böldüler. Bu hareketler izlendiğinde, el belirgin, döngüsel bir yol izledi; yazarların “penguen şeklinde” olarak tanımladığı bu izde elin açısı, fidenin çoğunlukla dik kalmasını sağlamak ve bükülme ya da burkulmayı en aza indirmek için değişiyordu.
Doğal hareketi makine yoluna dönüştürmek
Bu hareketi bir makinede yakalamak için ekip, kolu omuz ve dirsekten dönen basit iki bağlantılı bir yapı olarak ele aldı. Mühendislik terimleriyle bu, iki eklemli açık zincirli bir mekanizmadır; temel fikir basittir: bir segment vücuttan sallanır, ikinci segment birinciden sallanır ve birlikte elin izlediği türden bir yolu çizer. Sorun şu ki, bağımsız bırakıldığında böyle bir sistemin hareket edebileceği birçok yol vardır ve bunların çoğu fideler için uygun değildir. Yazarlar bunu, eklemlerin nasıl döndüğünü kontrol etmek için dairesel olmayan bir dişli takımı—çevreleri yuvarlak olmayan dişliler—kullanarak çözdüler; böylece kolun ucu insan esinli yola çok yakın bir iz takip etmeye zorlandı.
Verinin tasarıma yön vermesine izin vermek
Böyle bir mekanizmayı tasarlamak sadece gözle eğri çizmekten ibaret değildir. Dişlilerin şekli, montajı ve kolların uzunluğu dahil olmak üzere onlarca tasarım parametresi vardır. Bu faktörler karmaşık şekilde etkileşir. Bunu ele almak için yazarlar hareketi “yörünge matrisi” olarak tanımlayan yeni bir yöntem geliştirdiler. Önce ideal el yolunu aldılar ve boyut, konum ve rotasyon etkilerini kaldırarak standartlaştırdılar; ardından onu bir ızgara üzerine bindirdiler. Yolda bulunan ızgara hücreleri işaretlendi ve hareket sıfır ve birlerden oluşan bir desene dönüştü. Aynı işlemi olası ayarların tüm aralığı boyunca birçok aday makine yolu için yaptılar. Bu matrisleri karşılaştırarak herhangi bir tasarımın insan-benzeri yola ne kadar iyi uyduğunu hızlıca ölçebildiler ve bu skoru optimizasyon yazılımını genel en iyi çözüme yönlendirmek için kullandılar.
Atma mekanizmasının inşası ve test edilmesi
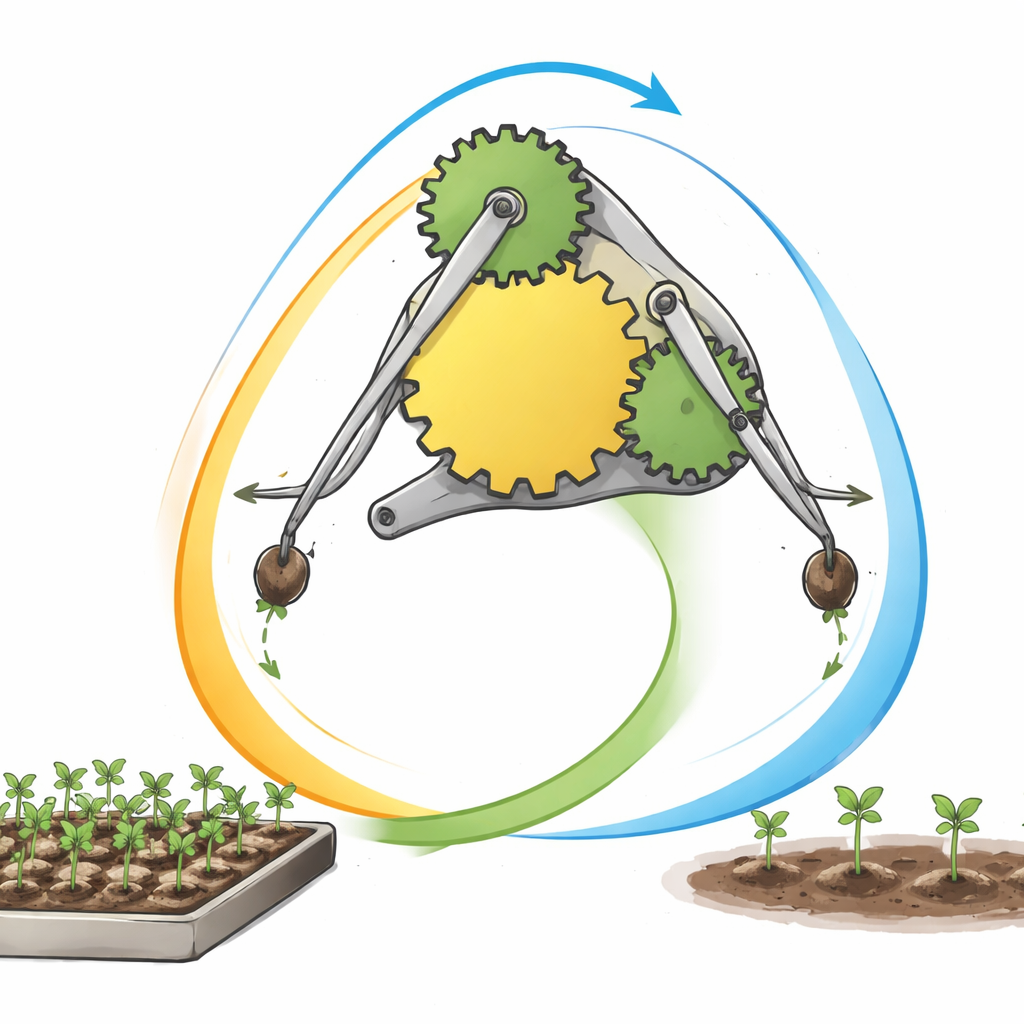
Optimum parametreler elde edilince araştırmacılar dairesel olmayan bir dişli seti ve iki fide tutma kolundan oluşan kompakt bir mekanizma tasarladılar. Merkezi taşıyıcı ve dairesel olmayan güneş dişlisi birlikte dönerken, her biri bir tutma koluna bağlı iki dairesel olmayan gezegen dişlisi tepki verir. Taşıyıcı döndükçe, her kol dikkatle şekillendirilmiş bir yolu izler: fideden tutarken ve çekerken yavaş ve neredeyse düz hareket eder, ardından fideleri dik konuma doğru kademeli olarak eğerken dikim bölgesine sallar ve son olarak bir kılavuz aygıtına itip bir sonraki fide için geri döner. Bilgisayar simülasyonları, kol ucunun yolunun ve hızının hedef yörüngeyle yakından eşleştiğini ve çekme-itme kuvvetlerini fidenin doğal büyüme doğrultusuna neredeyse hizalayarak bükülme ve kırılmayı azalttığını gösterdi.
Sanal modelden gerçek dünyadaki harekete
Takım daha sonra optimize edilmiş dişli profilleri ve kol boyutlarını kullanarak fiziksel bir prototip inşa etti. Dairesel olmayan dişli takımı, kam, gövde ve kollar test sehpasına monte edildi ve mekanizma çalışma hızlarında sürüldü. Yine yüksek hızlı bir kamera kullanarak gerçek kol hareketini kaydettiler ve planlanan yol ile karşılaştırdılar. Gerçek hareket ideal yörüngeyle büyük ölçüde örtüşerek yeni tasarımın ve yörünge-matrisi optimizasyon yönteminin amaçlandığı gibi çalıştığını doğruladı. Fidelerin alınması sırasında ölçülen hızlar ılımlıydı; bu doğruluğa yardımcı oldu ve hasarı azalttı, itme hareketi ise daha hızlıydı; bu da fidelerin geriye çekilmesini veya yerlerinin bozulmasını önlemeye yardımcı oldu.
Bu pirinç çiftçileri için ne anlama geliyor?
Pratik açıdan bu çalışma, bir makinenin yetenekli pirinç dikicilerin dikkatli, kıvrımlı el hareketini taklit edecek şekilde tasarlanabileceğini; ayrıca insan emeğinden çok daha hızlı ve tutarlı çalışabileceğini gösteriyor. Dairesel olmayan bir dişli sistemi ile veri odaklı bir hareket tanımını birleştirerek yazarlar; saksı fidelerini dikme, taşıma ve yerleştirme işlemlerini verimli şekilde yapabilen ve fideleri dik tutup büyük ölçüde sağlıklı bırakan bir dikim mekanizması geliştirdiler. Çiftçiler için bu tür bir teknoloji, büyük arazilerde el dikiminin faydalarını tam mekanize bir sisteme taşıyarak daha yüksek verim ve daha güvenilir dikim sağlayabilir.
Atıf: Zhou, M., Wang, G., Xu, T. et al. Trajectory matrix-guided optimal design of non-circular gear train seedling throwing mechanism for rice pot seedlings. Sci Rep 16, 13180 (2026). https://doi.org/10.1038/s41598-026-43135-1
Anahtar kelimeler: pirinç dikimi, fide atma, dairesel olmayan dişliler, yörünge optimizasyonu, tarım makineleri