Clear Sky Science · zh
利用多模态深度学习实现基于多无人机导航的轨迹预测系统
为协作无人机打造更聪明的天空
从搜救任务到作物监测和包裹投递,越来越多的无人机团队需要在拥挤且不可预测的空域中协同飞行。让这些编队在迅速完成任务的同时避免碰撞,是一项复杂的平衡。本文提出了一种新的人造智能系统,该系统学习预测多架无人机的运动,从而以高精度和低计算开销实现实时路径协调。
为什么引导多架无人机如此困难
为单架无人机规划安全路径已经很具挑战性:它需要在穿越建筑、树木和恶劣天气的同时高效到达目标。当多架无人机共享同一空域时,问题变得更加棘手。每台机器的决策都会影响其他机器,且都必须同时避开固定障碍物和彼此。传统规划方法通常一次处理一个目标——例如覆盖某一区域或避免碰撞——但在兼顾安全性、效率和平滑运动方面往往力不从心,尤其是在硬件和机载计算资源受限的情况下。
用于协同飞行的新“大脑”
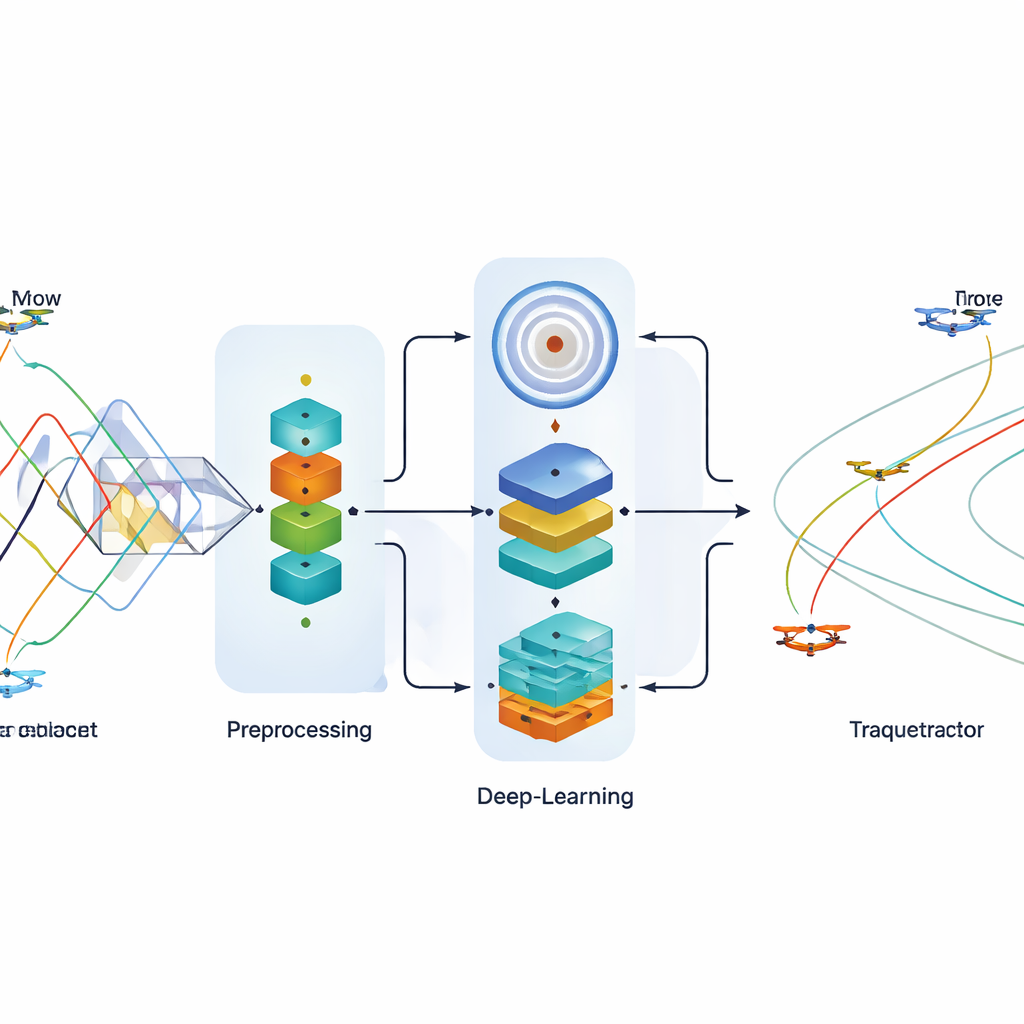
为了解决这一问题,作者提出了一种基于导航的多模态深度架构轨迹预测系统,简称 NTP-MMDA。简单来说,该系统像一个共享的“脑”,通过学习过往飞行数据来掌握无人机在时空中如何运动。它接收来自多架无人机的位置与传感器数据流,并预测每架机在未来数秒内可能的飞行位置。这些预测帮助更高层次的规划器选择既安全又协调的航线。在学习开始之前,系统使用称为分位数归一化的技术对输入数据进行细致清洗和标准化,使不同传感器的读数具有可比性并降低噪声。

三套学习引擎协同工作
NTP-MMDA 的核心是由三种深度学习组件组成的集成系统,每个组件从不同角度“观察”问题。第一部分是双向门控循环单元(BiGRU),用于捕捉无人机位置随时间的演变,既向后又向前查看飞行序列以理解运动模式。第二部分是变分自编码器(VAE),学习典型轨迹的压缩内部表示并能表达不确定性——在条件变化或数据不完整时尤其有用。第三部分是自适应深度置信网络(ADBN),用于提取分层模式和数据中的非线性关系,并在本工作中被调整以输出连续坐标而非简单的类别标签。它们的输出被融合为对每架无人机未来路径的单一预测。
在真实飞行数据上的验证
NTP-MMDA 模型在一个公开的无人机轨迹数据集上进行了测试,该数据集包含多架无人机的真实飞行路径。研究将该系统与若干成熟方法进行了比较,包括随机森林、经典回归、独立的循环网络和特征匹配技术。在关键的预测误差度量上——例如均方误差和平均绝对误差——新模型在三架不同无人机上始终产生更小的误差,意味着其预测位置更接近实际飞行路径。它不仅提高了精度,还运行更快,计算需求更低(以运算量、内存使用和推理时间衡量)。通过逐一移除三个学习组件的“消融”实验表明,三者各有贡献,但完整组合效果最好。
这对日常无人机应用意味着什么
对普通读者来说,要点是这项研究展示了一种更可靠的方法来预测无人机编队中每架机在未来短时间内的位置。有了更好的前瞻性, 无人机可以自动选择平滑、高效且无碰撞的航线,即便在灾区或复杂农田等繁忙或危险环境中也是如此。由于系统在达到高精度的同时对计算资源要求较低,因此非常适合在资源受限的平台上进行实用的实时部署。随着多无人机业务在应急响应、环境监测和商业服务中日益普及,像 NTP-MMDA 这样的方案有助于提升空域安全并增强自主设备的能力。
引用: Alzahrani, A. Harnessing multi-modal deep learning for multi-drone navigation-based trajectory prediction system. Sci Rep 16, 12670 (2026). https://doi.org/10.1038/s41598-026-42180-0
关键词: 多无人机导航, 轨迹预测, 深度学习, 碰撞避免, 自主无人机