Clear Sky Science · it
Sfruttare il deep learning multimodale per un sistema di previsione delle traiettorie basato sulla navigazione di più droni
Cieli più intelligenti per droni utili
Dalle missioni di ricerca e soccorso al monitoraggio delle colture e alla consegna di pacchi, sempre più spesso si chiede a gruppi di droni di volare insieme in spazi aerei affollati e imprevedibili. Evitare che queste flotte si scontrino mantenendo al contempo l’efficienza nel raggiungere gli obiettivi è un esercizio complesso. Questo articolo presenta un nuovo sistema di intelligenza artificiale che impara a prevedere come si muoveranno più droni, così che i loro percorsi possano essere coordinati in tempo reale con elevata accuratezza e basso costo computazionale.
Perché guidare più droni è così difficile
Pianificare un percorso sicuro per un singolo drone è già impegnativo: deve districarsi tra edifici, alberi e condizioni meteorologiche avverse raggiungendo comunque il bersaglio in modo efficiente. Quando più droni condividono lo stesso spazio aereo, il problema diventa molto più complesso. Le decisioni di ciascuna macchina influenzano le altre e tutti devono evitare sia ostacoli fissi sia collisioni reciproche. I metodi di pianificazione tradizionali spesso gestiscono un obiettivo alla volta — come coprire un’area o evitare impatti — ma fanno fatica a bilanciare insieme sicurezza, efficienza e movimenti fluidi, specialmente quando l’hardware e i calcolatori di bordo sono limitati.
Un nuovo “cervello” per il volo coordinato dei droni
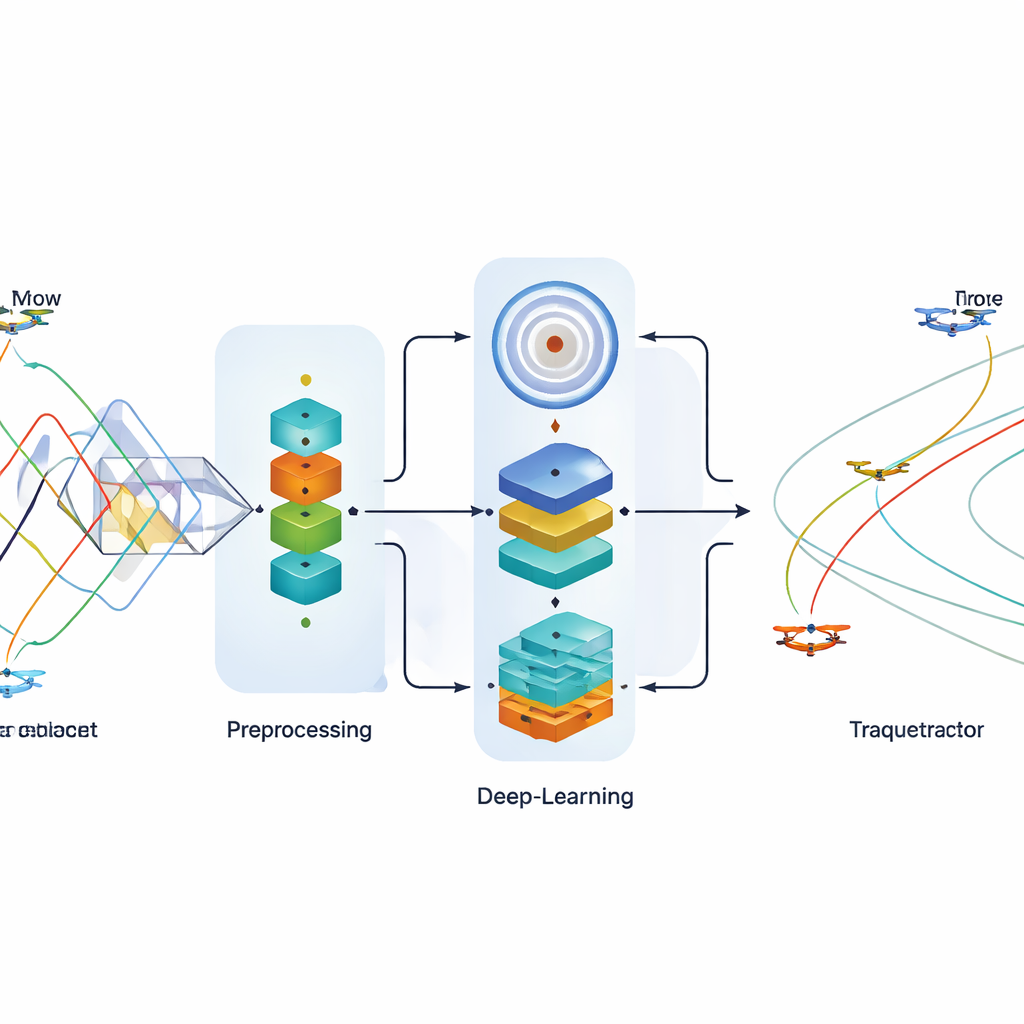
Per affrontare questo problema, l’autore introduce un sistema di Previsione delle Traiettorie basato sulla Navigazione con Architettura Deep Multimodale, abbreviato NTP-MMDA. In termini semplici, il sistema agisce come un “cervello” condiviso che apprende dalle missioni passate come i droni tendono a muoversi nello spazio e nel tempo. Riceve flussi di dati di posizione e sensori provenienti da più droni e prevede dove ciascuno è probabile che voli nei secondi successivi. Queste previsioni aiutano un pianificatore di livello superiore a scegliere rotte sicure e ben coordinate. Prima dell’apprendimento, il sistema pulisce e standardizza accuratamente i dati in ingresso usando una tecnica chiamata normalizzazione per quantili, che rende confrontabili letture di sensori diversi e riduce il rumore.

Tre motori di apprendimento che lavorano insieme
Il cuore di NTP-MMDA è un ensemble di tre componenti di deep learning che “vedono” il problema da angolazioni diverse. Il primo, un’unità ricorrente gated bidirezionale (BiGRU), è progettato per catturare come le posizioni dei droni evolvono nel tempo, guardando sia indietro sia avanti lungo una sequenza di volo per capire i pattern di movimento. Il secondo, un autoencoder variazionale (VAE), apprende una rappresentazione interna compressa delle traiettorie tipiche e può rappresentare l’incertezza — utile quando le condizioni cambiano o i dati sono incompleti. Il terzo, una rete di credenze profonde adattiva (ADBN), è costruita per estrarre schemi stratificati e relazioni non lineari nei dati e, in questo lavoro, è adattata per produrre coordinate continue anziché semplici etichette di classe. Le loro uscite vengono fuse in una singola previsione del percorso futuro di ciascun drone.
Mettere alla prova il sistema con dati di voli reali
Il modello NTP-MMDA è stato testato su un dataset di traiettorie di droni liberamente disponibile contenente percorsi di volo reali di più droni. Lo studio ha confrontato il nuovo sistema con diversi metodi consolidati, tra cui foreste casuali, regressione classica, reti ricorrenti isolate e tecniche di matching delle caratteristiche. Su misure chiave di errore di previsione — come l’errore quadratico medio e l’errore assoluto medio — il nuovo modello ha prodotto costantemente errori più piccoli per tre diversi droni, il che significa che le posizioni previste erano più vicine ai percorsi di volo reali. Non solo ha migliorato l’accuratezza, ma ha anche funzionato più rapidamente, con richieste computazionali inferiori misurate in operazioni, uso di memoria e tempo di inferenza. Attenti test di “ablazione”, in cui ciascuno dei tre componenti di apprendimento è stato rimosso a turno, hanno mostrato che tutti e tre contribuiscono, ma la combinazione completa funziona al meglio.
Cosa significa questo per l’uso quotidiano dei droni
Per il pubblico generale, la conclusione è che questa ricerca dimostra un modo più affidabile per prevedere dove si troverà ciascun drone in uno stormo, a pochi istanti di distanza. Con una migliore lungimiranza, i droni possono scegliere automaticamente rotte fluide, efficienti e prive di collisioni, anche in ambienti affollati o pericolosi come zone di disastro o terreni agricoli complessi. Poiché il sistema raggiunge elevata precisione usando relativamente poca potenza di calcolo, è adatto all’uso pratico in tempo reale su piattaforme con risorse limitate. Con l’aumento delle operazioni multi-drone nel soccorso, nel monitoraggio ambientale e nei servizi commerciali, approcci come NTP-MMDA potrebbero contribuire a mantenere i nostri cieli più sicuri e i nostri assistenti autonomi più efficaci.
Citazione: Alzahrani, A. Harnessing multi-modal deep learning for multi-drone navigation-based trajectory prediction system. Sci Rep 16, 12670 (2026). https://doi.org/10.1038/s41598-026-42180-0
Parole chiave: navigazione multi-drone, previsione delle traiettorie, deep learning, evitamento delle collisioni, UAV autonomi