Clear Sky Science · sv
Utnyttja multimodal djupinlärning för ett system för banprediktion baserat på flerdronersnavigation
Smartare himlar för hjälpsamma drönare
Från räddningsinsatser till grödövervakning och paketleverans ombeds team av drönare i allt högre grad att flyga tillsammans genom trängda, oförutsägbara luftrum. Att hålla dessa flottor från att kollidera samtidigt som de når sina mål snabbt är ett komplext balanseringsspel. Denna artikel presenterar ett nytt artificiellt intelligenssystem som lär sig förutsäga hur flera drönare kommer att röra sig, så att deras banor kan samordnas i realtid med hög noggrannhet och låg beräkningskostnad.
Varför det är så svårt att styra många drönare
Att planera en säker bana för en enda drönare är redan utmanande: den måste slingra sig runt byggnader, träd och dåligt väder samtidigt som den når sitt mål effektivt. När flera drönare delar samma luftrum blir problemet mycket svårare. Varje maskins beslut påverkar de andra, och alla måste undvika både fasta hinder och varandra. Traditionella planeringsmetoder hanterar ofta ett mål i taget — som att täcka ett område eller undvika kollisioner — men har svårt att balansera säkerhet, effektivitet och mjuk rörelse tillsammans, särskilt när hårdvara och omborddatorer är begränsade.
En ny hjärna för koordinerad drönarflygning
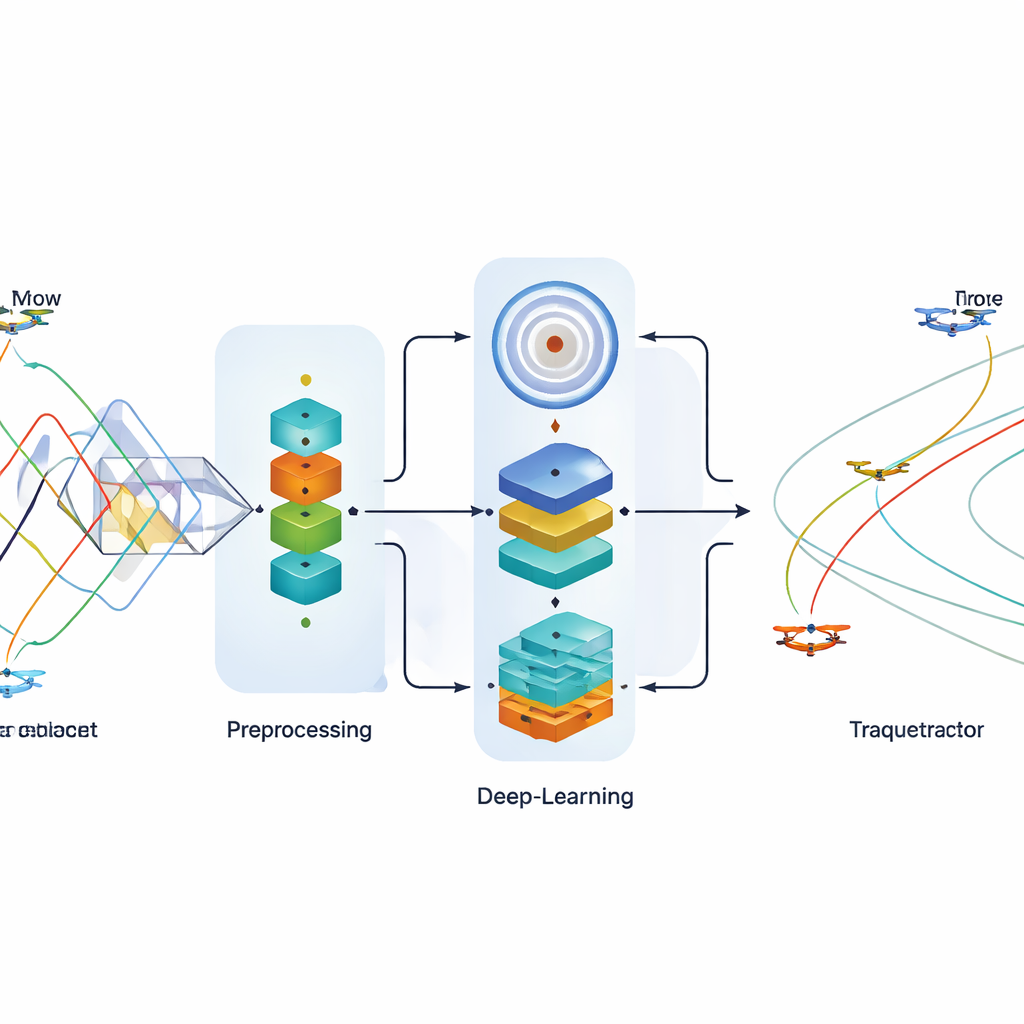
För att tackla detta presenterar författaren ett navigationsbaserat Trajectory Prediction System med en Multi-Modal Deep Architecture, förkortat NTP-MMDA. Enkelt uttryckt fungerar systemet som en delad ”hjärna” som lär sig från tidigare flygningar hur drönare tenderar att röra sig i rum och tid. Det tar emot strömmar av positions- och sensordata från flera drönare och förutspår var varje enhet sannolikt kommer att flyga härnäst, sekunder in i framtiden. Dessa prediktioner hjälper en övergripande planerare att välja banor som är säkra och väl koordinerade. Innan inlärningen börjar rengör och standardiserar systemet noggrant de inkommande uppgifterna med en teknik kallad kvantilnormalisering, vilket gör olika sensoravläsningar jämförbara och minskar brus.

Tre inlärningsmotorer som arbetar tillsammans
Hjärtat i NTP-MMDA är en ensemble av tre djupinlärningskomponenter som var och en ”ser” problemet ur en annan vinkel. Den första, en bidirektionell gated recurrent unit (BiGRU), är utformad för att fånga hur drönarpositioner utvecklas över tid genom att titta både bakåt och framåt längs en flygsekvens för att förstå rörelsemönster. Den andra, en variational autoencoder (VAE), lär sig en komprimerad intern bild av typiska banor och kan representera osäkerhet — användbart när förhållanden förändras eller data är ofullständiga. Den tredje, ett adaptivt deep belief network (ADBN), är byggt för att extrahera lagerade mönster och icke-linjära samband i data, och i detta arbete anpassas det för att ge kontinuerliga koordinater snarare än enkla klassetiketter. Deras utgångar fusioneras till en enskild prediktion av varje drönars framtida bana.
Verifiering av systemet med verkliga flygdata
NTP-MMDA-modellen testades på en öppet tillgänglig drönarbanedatamängd som innehöll verkliga flygspår från flera drönare. Studien jämförde det nya systemet med flera etablerade metoder, inklusive random forests, klassisk regression, fristående återkommande nätverk och feature-matching-tekniker. På nyckelmått för prediktionsfel — såsom medelkvadratfel och medelabsolutfel — producerade den nya modellen konsekvent mindre fel för tre olika drönare, vilket innebär att dess förutsagda positioner låg närmare de faktiska flygbanorna. Den förbättrade inte bara noggrannheten utan körde också snabbare, med lägre beräkningskrav mätt i operationer, minnesanvändning och inferenstid. Noggranna ablationstester, där var och en av de tre inlärningskomponenterna togs bort i tur och ordning, visade att alla tre bidrar, men att hela kombinationen fungerar bäst.
Vad detta betyder för vardaglig drönaranvändning
För en icke-expert är slutsatsen att denna forskning visar ett mer pålitligt sätt att förutsäga var varje drönare i en flock kommer att befinna sig, några ögonblick framåt. Med bättre förutseende kan drönare automatiskt välja rutter som är smidiga, effektiva och fria från kollisioner, även i trånga eller farliga miljöer som katastrofområden eller komplex åkermark. Eftersom systemet uppnår hög noggrannhet samtidigt som det använder relativt lite beräkningskraft, lämpar det sig väl för praktisk, realtidsanvändning på resursbegränsade plattformar. När flerdronoperationer blir vanligare inom räddningsinsatser, miljöövervakning och kommersiella tjänster kan tillvägagångssätt som NTP-MMDA bidra till att hålla våra himlar säkrare och våra autonoma hjälpare mer kapabla.
Citering: Alzahrani, A. Harnessing multi-modal deep learning for multi-drone navigation-based trajectory prediction system. Sci Rep 16, 12670 (2026). https://doi.org/10.1038/s41598-026-42180-0
Nyckelord: flerdronersnavigation, banprediktion, djupinlärning, kollisionsundvikande, autonoma UAV:er