Clear Sky Science · ar
استغلال التعلم العميق متعدد النماذج لنظام توقع المسارات قائم على ملاحة طائرات متعددة بدون طيار
سماء أكثر ذكاءً لطائرات مساعدة
من مهام البحث والإنقاذ إلى مراقبة المحاصيل وتوصيل الطرود، تُطلب من مجموعات الطائرات بدون طيار بشكل متزايد أن تطير معًا عبر مجالات جوية مزدحمة وغير متوقعة. إبقاء هذه الأساطيل بعيدًا عن التصادم مع الوصول إلى أهدافها بسرعة هو عمل توازن معقد. يقدم هذا البحث نظام ذكاء صناعي جديد يتعلم توقع حركة عدة طائرات بدون طيار، حتى يمكن تنسيق مساراتها في الوقت الفعلي بدقة عالية وتكلفة حوسبة منخفضة.
لماذا توجيه العديد من الطائرات صعب للغاية
تخطيط مسار آمن لطائرة واحدة بالفعل يمثل تحدياً: يجب أن تتنقل حول المباني والأشجار والطقس السيئ بينما تصل إلى هدفها بكفاءة. عندما تتشارك عدة طائرات نفس المجال الجوي، يصبح الأمر أصعب بكثير. قرارات كل آلة تؤثر على الأخرى، ويجب على الجميع تجنب العقبات الثابتة وبعضهم البعض. غالبًا ما تتعامل طرق التخطيط التقليدية مع هدف واحد في كل مرة—مثل تغطية منطقة أو تجنب الاصطدام—لكنها تكافح لموازنة السلامة والكفاءة والحركة السلسة معًا، خاصةً عندما تكون الأجهزة والكمبيوترات الموجودة على متنها محدودة.
دماغ جديد لطيران منسق للطائرات
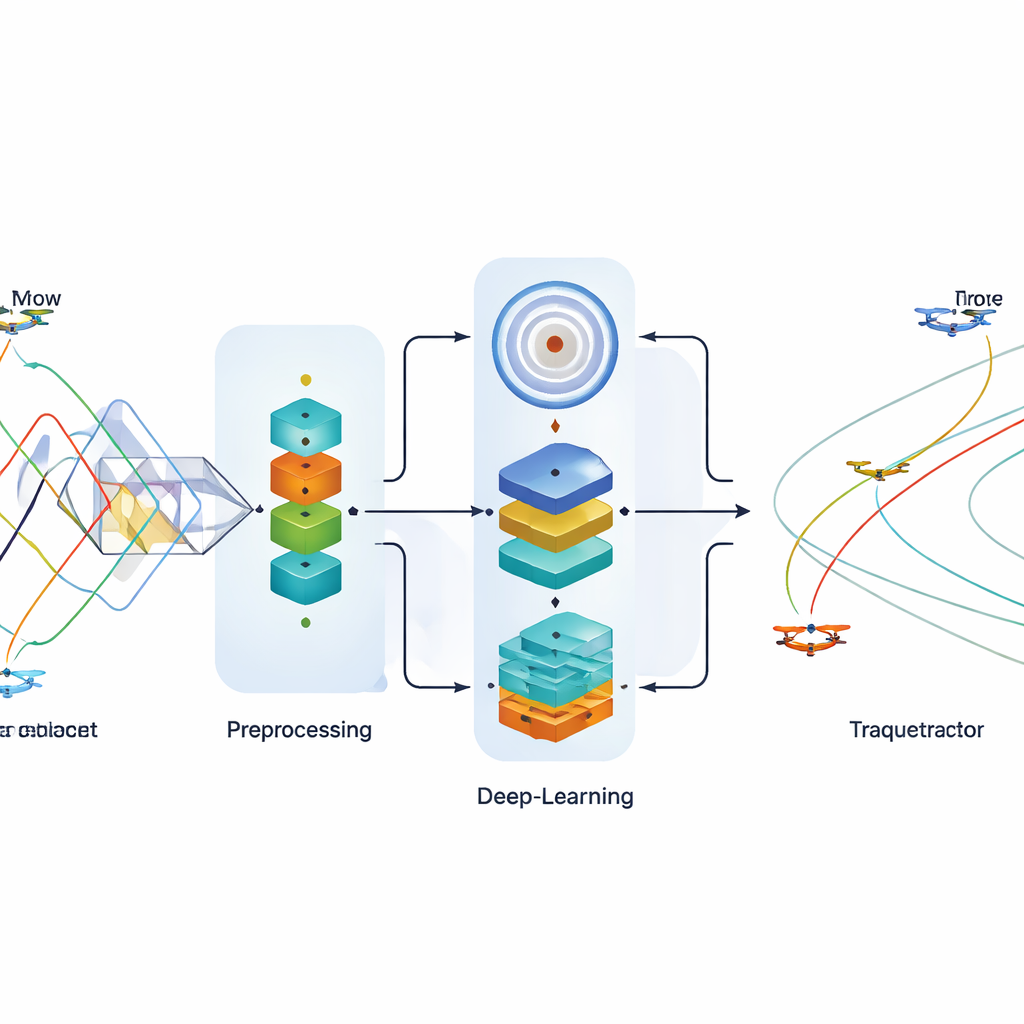
لمعالجة ذلك، يقدم المؤلف نظام توقع المسار القائم على الملاحة باستخدام بنية عميقة متعددة النماذج، ويُختصر إلى NTP-MMDA. ببساطة، يعمل النظام كـ «دماغ» مشترك يتعلم من الرحلات السابقة كيف تميل الطائرات إلى التحرك في المكان والزمان. يستقبل تدفقات من بيانات الموقع وأجهزة الاستشعار من عدة طائرات ويتوقع مكان كل منها على الأرجح خلال ثوانٍ قادمة. تساعد هذه التوقعات مخططًا أعلى مستوى على اختيار مسارات آمنة ومنسقة جيدًا. قبل أن يبدأ التعلم، يقوم النظام بتنظيف وتوحيد البيانات الواردة بعناية باستخدام تقنية تسمى التطبيع الكميلي (quantile normalization)، التي تجعل قراءات المستشعرات المختلفة قابلة للمقارنة وتقلل الضوضاء.

ثلاثة محركات تعلم تعمل معًا
جوهر NTP-MMDA هو مجموعة مكوّنة من ثلاثة مكونات للتعلم العميق يرى كل منها المشكلة من زاوية مختلفة. الأول، وحدة تكرارية متبوّأة بوابيت ثنائية الاتجاه (BiGRU)، مصممة لالتقاط كيف تتطور مواقع الطائرات مع الزمن، بالنظر إلى الوراء والأمام على طول تسلسل الطيران لفهم أنماط الحركة. الثاني، مشفّر تلقائي تغايرِي (VAE)، يتعلم صورة داخلية مضغوطة للمسارات النموذجية ويمكنه تمثيل عدم اليقين—وهو أمر مفيد عندما تتغير الظروف أو تكون البيانات ناقصة. الثالث، شبكة اعتقاد عميق قابلة للتكيّف (ADBN)، بُنيت لاستخراج الأنماط الطبقية والعلاقات غير الخطية في البيانات، وفي هذا العمل تم تكييفها لإخراج إحداثيات مستمرة بدلاً من تسميات فئوية بسيطة. تُدمَج مخرجاتها في توقع واحد لمسار كل طائرة في المستقبل.
اختبار النظام على بيانات طيران حقيقية
تم اختبار نموذج NTP-MMDA على مجموعة بيانات مسارات طائرات متاحة علنًا تحتوي على مسارات طيران حقيقية من عدة طائرات. قارَنَت الدراسة النظام الجديد بعدة طرق معروفة، بما في ذلك الغابات العشوائية، والانحدار الكلاسيكي، والشبكات التكرارية المستقلة، وتقنيات مطابقة الميزات. على مقاييس رئيسية لخطأ التوقع—مثل متوسط مربع الخطأ والمتوسط المطلق للخطأ—أنتَج النموذج الجديد أخطاء أصغر باستمرار لثلاث طائرات مختلفة، مما يعني أن المواقع المتوقعة كانت أقرب إلى المسارات الفعلية. لم يحسّن الدقة فحسب، بل عمل أيضًا بسرعة أكبر وبمتطلبات حسابية أقل مقاسة بالعمليات، واستخدام الذاكرة، ووقت الاستدلال. أظهرت اختبارات "الإزالة" الدقيقة، التي يتم فيها إزالة كل مكوّن تعليمي من الثلاثة بالتتابع، أن الثلاثة يساهمون جميعًا، لكن التركيب الكامل هو الأفضل.
ماذا يعني هذا لاستخدام الطائرات في الحياة اليومية
بالنسبة لغير المتخصص، الخلاصة هي أن هذا البحث يبين طريقة أكثر موثوقية للتنبؤ بمكان كل طائرة في السرب قبل لحظات. مع رؤية مستقبلية أفضل، يمكن للطائرات أن تختار تلقائيًا مسارات سلسة وكفؤة وخالية من التصادمات، حتى في بيئات مزدحمة أو خطرة مثل مناطق الكوارث أو الأراضي الزراعية المعقدة. وبما أن النظام يحقق دقة عالية مع استخدام طاقة حسابية محدودة نسبيًا، فهو مناسب للاستخدام العملي في الوقت الحقيقي على منصات محدودة الموارد. مع تزايد شيوع عمليات الطائرات المتعددة في الاستجابة للطوارئ، ومراقبة البيئة، والخدمات التجارية، يمكن أن تساعد نهج مثل NTP-MMDA في جعل سماءنا أكثر أمانًا ومساعدينا الذاتيين أكثر كفاءة.
الاستشهاد: Alzahrani, A. Harnessing multi-modal deep learning for multi-drone navigation-based trajectory prediction system. Sci Rep 16, 12670 (2026). https://doi.org/10.1038/s41598-026-42180-0
الكلمات المفتاحية: ملاحة طائرات متعددة بدون طيار, توقع المسار, التعلم العميق, تجنب الاصطدام, المركبات الجوية الذاتية