Clear Sky Science · nl
Multi-modale deep learning inzetten voor een trajectvoorspellingssysteem gebaseerd op multi-drone-navigatie
Slimmere luchten voor behulpzame drones
Van zoek- en reddingsoperaties tot gewasmonitoring en pakketbezorging: teams van drones moeten steeds vaker samen vliegen door drukke, onvoorspelbare luchtruimten. Die vloot veilig houden zonder hun doelen te vertragen is een complexe evenwichtsoefening. Dit artikel presenteert een nieuw kunstmatig-intelligentiesysteem dat leert voorspellen hoe meerdere drones zullen bewegen, zodat hun trajecten in realtime gecoördineerd kunnen worden met hoge nauwkeurigheid en lage rekenkosten.
Waarom het sturen van veel drones zo moeilijk is
Het plannen van een veilige route voor een enkele drone is al uitdagend: hij moet om gebouwen, bomen en slecht weer heen laveren en toch efficiënt zijn doel bereiken. Wanneer meerdere drones hetzelfde luchtruim delen, wordt het probleem veel complexer. De beslissingen van elk toestel beïnvloeden de anderen, en iedereen moet zowel vaste obstakels als elkaar vermijden. Traditionele planningsmethoden behandelen vaak één doel tegelijk — bijvoorbeeld gebiedsdekking of botsingsvermijding — maar worstelen om veiligheid, efficiëntie en vloeiende beweging gelijktijdig in balans te brengen, vooral wanneer hardware en boordcomputers beperkt zijn.
Een nieuw brein voor gecoördineerd dronevliegen
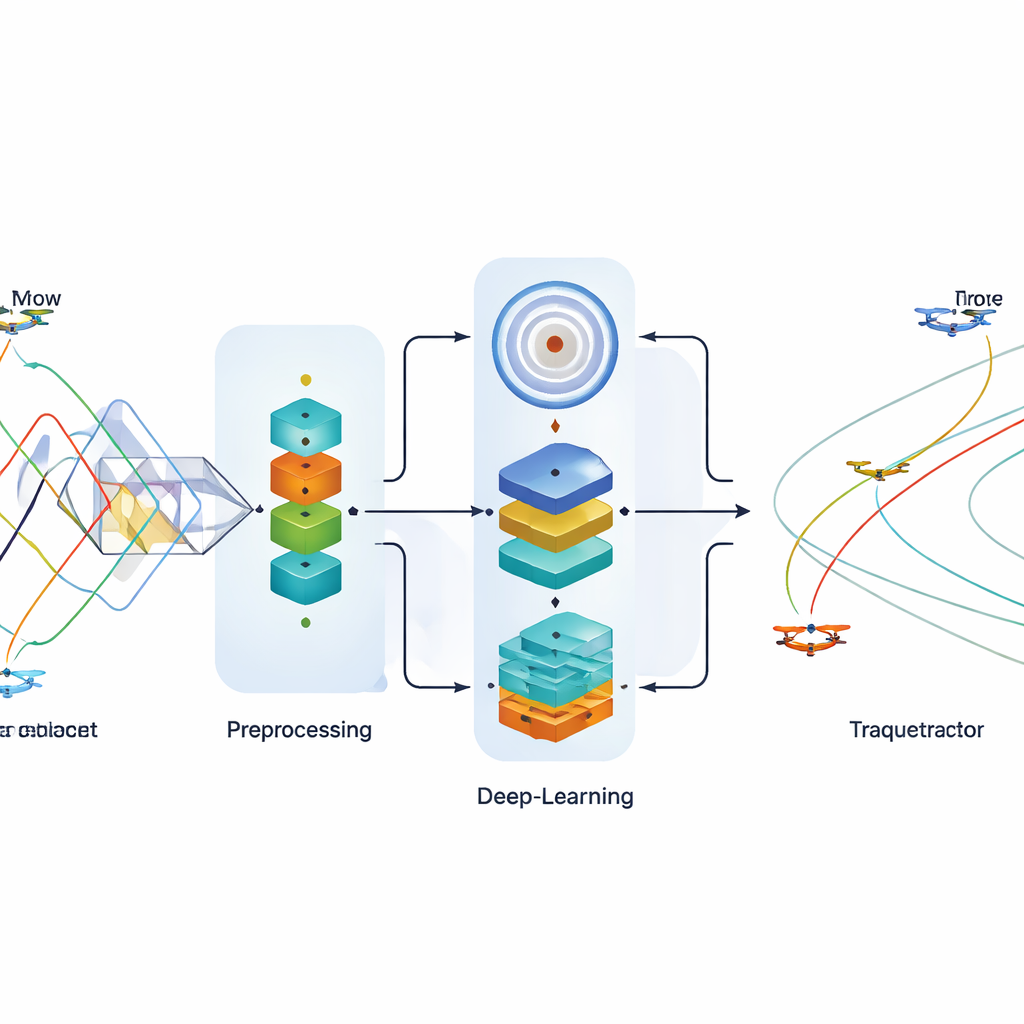
Om dit aan te pakken introduceert de auteur een navigatiegebaseerd Trajectory Prediction System met een Multi-Modal Deep Architecture, afgekort NTP-MMDA. Simpel gezegd fungeert het systeem als een gedeeld “brein” dat uit eerdere vluchten leert hoe drones zich gewoonlijk door ruimte en tijd bewegen. Het ontvangt stromen van positie- en sensorgegevens van meerdere drones en voorspelt waar elk toestel waarschijnlijk naartoe zal vliegen, enkele seconden in de toekomst. Deze voorspellingen helpen een planner op hoger niveau om trajecten te kiezen die veilig en goed gecoördineerd zijn. Voordat het leren begint, maakt het systeem de binnenkomende data zorgvuldig schoon en standaardiseert het met een techniek genaamd quantielnormalisatie, die verschillende sensorlezingen vergelijkbaar maakt en ruis vermindert.

Drie leer-engines die samenwerken
De kern van NTP-MMDA is een ensemble van drie deep-learningcomponenten die elk het probleem vanuit een andere invalshoek “zien”. De eerste, een bidirectionele gated recurrent unit (BiGRU), is ontworpen om vast te leggen hoe droneposities in de loop van de tijd evolueren, door zowel achterwaarts als vooruit in een vluchtsequentie te kijken om bewegingspatronen te begrijpen. De tweede, een variational autoencoder (VAE), leert een gecomprimeerd intern beeld van typische trajecten en kan onzekerheid representeren — nuttig wanneer omstandigheden veranderen of data incompleet zijn. De derde, een adaptive deep belief network (ADBN), is opgebouwd om gelaagde patronen en niet-lineaire relaties in de data te extraheren en is in dit werk aangepast om continue coördinaten te produceren in plaats van eenvoudige klassenlabels. Hun outputs worden samengevoegd tot een enkele voorspelling van het toekomstige pad van elke drone.
Het systeem bewijzen met echte vluchtdata
Het NTP-MMDA-model is getest op een openbaar beschikbare dataset met dronetrajecten die echte vluchtpaden van meerdere drones bevat. In de studie is het nieuwe systeem vergeleken met verschillende gevestigde methoden, waaronder random forests, klassieke regressie, zelfstandige recurrente netwerken en feature-matching technieken. Op belangrijke maatstaven voor voorspellingsfout — zoals mean squared error en mean absolute error — produceerde het nieuwe model consequent kleinere fouten voor drie verschillende drones, wat betekent dat de voorspelde posities dichter bij de werkelijke vluchtpaden lagen. Het verbeterde niet alleen de nauwkeurigheid maar draaide ook sneller, met lagere rekenvereisten gemeten in operaties, geheugenverbruik en inferentietijd. Zorgvuldig uitgevoerde “ablatietests”, waarbij elk van de drie leerelementen op zijn beurt werd verwijderd, toonden aan dat alle drie bijdragen, maar dat de volledige combinatie het beste werkt.
Wat dit betekent voor alledaags dronegebruik
Voor de niet-specialist is de belangrijkste conclusie dat dit onderzoek een betrouwbaardere manier laat zien om te voorspellen waar elke drone in een zwerm zich korte tijd later zal bevinden. Met betere vooruitziende blik kunnen drones automatisch routes kiezen die soepel, efficiënt en vrij van botsingen zijn, zelfs in drukke of gevaarlijke omgevingen zoals rampgebieden of complexe landbouwterreinen. Omdat het systeem hoge nauwkeurigheid bereikt met relatief weinig rekenkracht, is het goed geschikt voor praktisch, realtime gebruik op platformen met beperkte middelen. Naarmate multi-drone-operaties gebruikelijker worden in hulpdiensten, milieumonitoring en commerciële diensten, kunnen benaderingen zoals NTP-MMDA helpen onze luchten veiliger te houden en onze autonome hulpjes capabeler.
Bronvermelding: Alzahrani, A. Harnessing multi-modal deep learning for multi-drone navigation-based trajectory prediction system. Sci Rep 16, 12670 (2026). https://doi.org/10.1038/s41598-026-42180-0
Trefwoorden: multi-drone-navigatie, trajectvoorspelling, deep learning, botsingsvermijding, autonome UAV's