Clear Sky Science · ru
Использование мультимодального глубокого обучения для системы предсказания траекторий на основе многодронной навигации
Более умное небо для полезных дронов
От поисково-спасательных операций до мониторинга посевов и доставки посылок — команды дронов всё чаще вынуждены лететь вместе в загруженных и непредсказуемых воздушных пространствах. Сохранить эти флоты от столкновений, при этом обеспечив быстрое выполнение задач, — непростая балансировка. В этой работе представлена новая система искусственного интеллекта, которая учится предсказывать, как будут двигаться несколько дронов, чтобы их траектории можно было координировать в реальном времени с высокой точностью и невысокой вычислительной стоимостью.
Почему управление множеством дронов так сложно
Планирование безопасного пути для одного дрона уже само по себе вызывает трудности: ему нужно лавировать между зданиями, деревьями и плохой погодой, одновременно эффективно достигая цели. Когда в одном воздушном пространстве действует несколько дронов, задача становится значительно сложнее. Решения каждого аппарата влияют на других, и всем нужно избегать как статических препятствий, так и друг друга. Традиционные методы планирования часто решают одну задачу за раз — например, покрытие области или избегание столкновений — но испытывают затруднения при одновременном учёте безопасности, эффективности и плавности движения, особенно при ограничениях аппаратного обеспечения и бортовых вычислителей.
Новый «мозг» для скоординированного полёта дронов
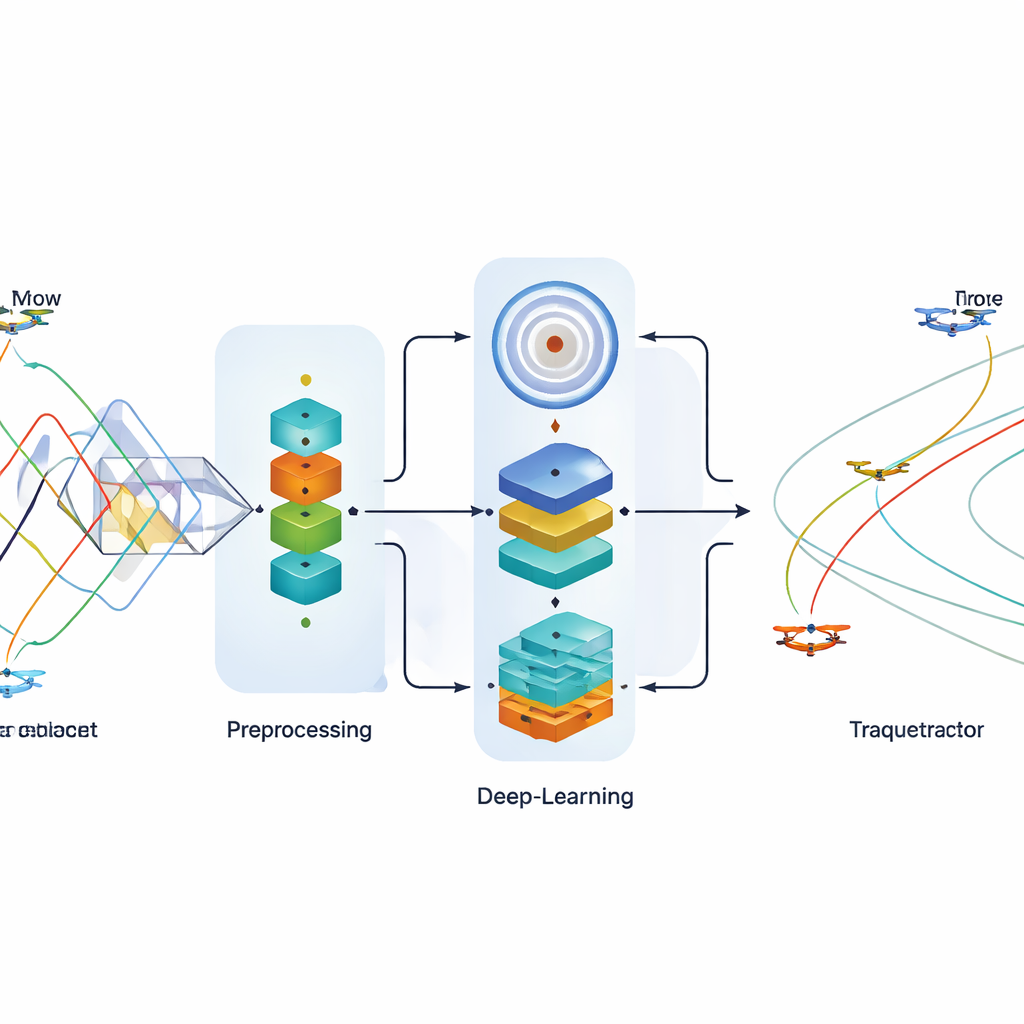
Для решения этой проблемы автор предлагает Навигационно-ориентированную Систему Предсказания Траекторий с Мультимодальной Глубокой Архитектурой, сокращённо NTP-MMDA. Проще говоря, система выступает как общий «мозг», который на основе прошлых полётов учится тому, как дроны склонны перемещаться в пространстве и времени. Она получает потоки данных о позициях и показаниях сенсоров от нескольких дронов и предсказывает, куда каждый из них, вероятно, полетит в ближайшие секунды. Эти предсказания помогают планировщику более высокого уровня выбирать безопасные и скоординированные траектории. Перед началом обучения система тщательно очищает и стандартизирует входящие данные с помощью метода, называемого квантилизационной нормализацией, что делает сравнимыми разные показания сенсоров и снижает шум.

Три обучающих механизма, работающие вместе
Ядро NTP-MMDA — это ансамбль из трёх компонентов глубокого обучения, каждый из которых «видит» задачу под своим углом. Первый, двунаправленная рекуррентная ячейка с затворами (BiGRU), предназначен для захвата того, как позиции дронов меняются во времени, анализируя последовательность полёта как в прошлое, так и в будущее, чтобы понять шаблоны движения. Второй, вариационный автоэнкодер (VAE), изучает сжатое внутреннее представление типичных траекторий и способен моделировать неопределённость — полезно при изменяющихся условиях или неполных данных. Третий, адаптивная глубокая сеть доверия (ADBN), сконструирована для извлечения многоуровневых шаблонов и нелинейных зависимостей в данных и в этой работе адаптирована для выдачи непрерывных координат вместо простых меток классов. Их выходы объединяются в единое предсказание будущей траектории каждого дрона.
Проверка системы на данных реальных полётов
Модель NTP-MMDA была протестирована на общедоступном наборе данных траекторий дронов, содержащем реальные полётные маршруты нескольких аппаратов. В исследовании новая система сравнивалась с несколькими устоявшимися методами, включая случайные леса, классическую регрессию, отдельные рекуррентные сети и методы сопоставления признаков. По ключевым метрикам ошибки предсказания — таким как среднеквадратичная ошибка и средняя абсолютная ошибка — новая модель последовательно давала меньшие ошибки для трёх разных дронов, то есть её предсказанные позиции были ближе к фактическим траекториям полёта. Она не только увеличивала точность, но и работала быстрее, с меньшими вычислительными затратами, измеряемыми в операциях, использовании памяти и времени вывода. Тщательные абляционные тесты, в которых по очереди удаляли каждый из трёх компонентов обучения, показали, что все три вносят вклад, но полная комбинация работает лучше всего.
Что это означает для повседневного использования дронов
Для неспециалиста суть в том, что это исследование демонстрирует более надёжный способ прогнозировать, где будет находиться каждый дрон в стае, за доли секунды вперёд. С лучшим предвидением дроны могут автоматически выбирать маршруты, которые будут плавными, эффективными и бесконфликтными, даже в загруженных или опасных условиях, таких как зоны бедствий или сложные сельскохозяйственные участки. Поскольку система достигает высокой точности при относительно низких вычислительных затратах, она хорошо подходит для практического использования в реальном времени на платформах с ограниченными ресурсами. По мере того как многодронные операции становятся более распространёнными в экстренном реагировании, мониторинге окружающей среды и коммерческих сервисах, подходы вроде NTP-MMDA могут помочь сделать наше небо безопаснее и повысить возможности автономных помощников.
Цитирование: Alzahrani, A. Harnessing multi-modal deep learning for multi-drone navigation-based trajectory prediction system. Sci Rep 16, 12670 (2026). https://doi.org/10.1038/s41598-026-42180-0
Ключевые слова: навигация нескольких дронов, предсказание траекторий, глубокое обучение, избежание столкновений, автономные БПЛА