Clear Sky Science · es
Aprovechando el aprendizaje profundo multimodal para un sistema de predicción de trayectorias basado en navegación multi-dron
Cielos más inteligentes para drones útiles
Desde misiones de búsqueda y rescate hasta el monitoreo de cultivos y la entrega de paquetes, cada vez se pide más a los equipos de drones que vuelen juntos por espacios aéreos concurridos e impredecibles. Evitar que estas flotas colisionen mientras alcanzan sus objetivos con rapidez es un complicado juego de malabares. Este artículo presenta un nuevo sistema de inteligencia artificial que aprende a predecir cómo se moverán múltiples drones, de modo que sus trayectorias puedan coordinarse en tiempo real con alta precisión y bajo coste computacional.
Por qué guiar a muchos drones es tan difícil
Planificar una ruta segura para un solo dron ya es un reto: debe esquivar edificios, árboles y mal tiempo mientras alcanza su destino de manera eficiente. Cuando varios drones comparten el mismo espacio aéreo, el problema se complica mucho más. Las decisiones de cada máquina afectan a las demás, y todas deben evitar tanto obstáculos fijos como entre sí. Los métodos de planificación tradicionales a menudo manejan un objetivo a la vez —como cubrir un área o evitar colisiones— pero tienen dificultades para equilibrar seguridad, eficiencia y movimiento suave a la vez, especialmente cuando el hardware y los ordenadores a bordo son limitados.
Un nuevo cerebro para el vuelo coordinado de drones
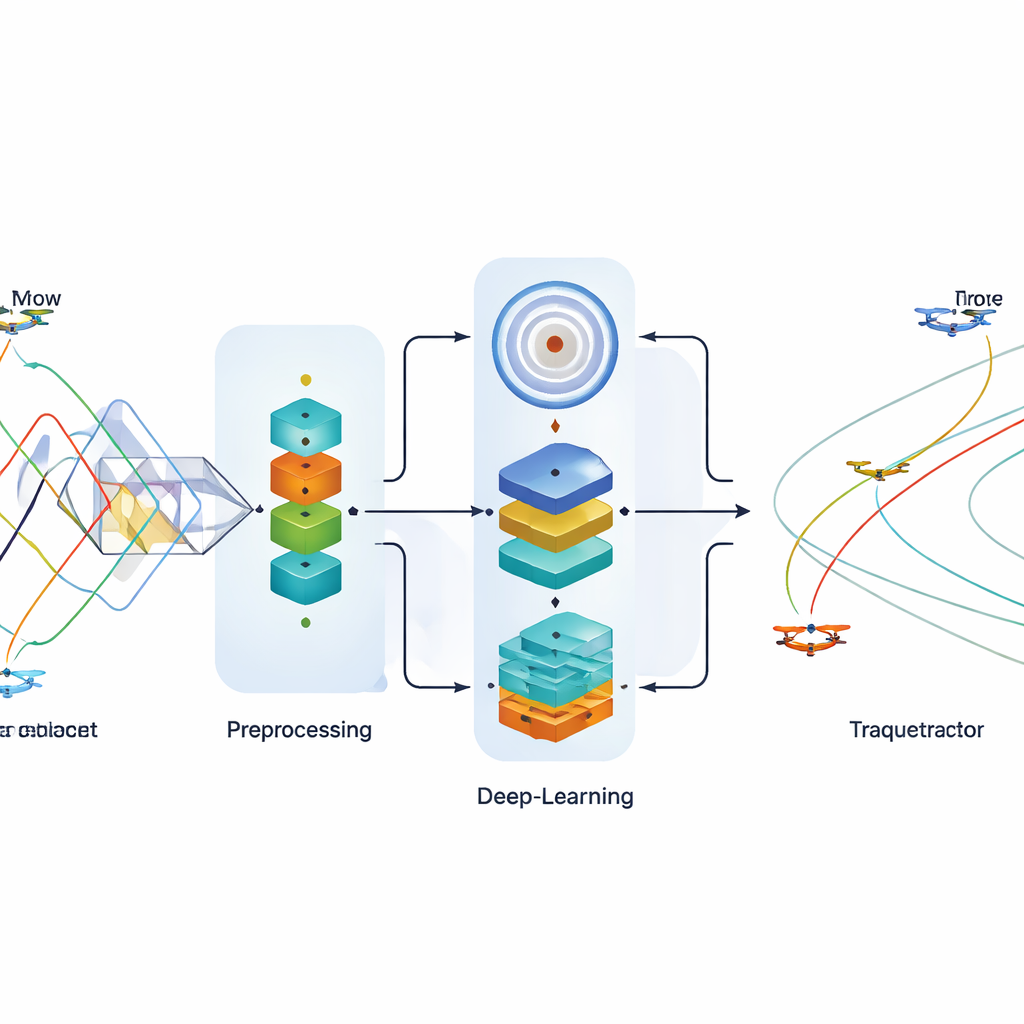
Para abordar esto, el autor presenta un Sistema de Predicción de Trayectorias basado en Navegación con Arquitectura Profunda Multimodal, abreviado NTP-MMDA. En términos sencillos, el sistema actúa como un “cerebro” compartido que aprende de vuelos pasados cómo tienden a moverse los drones en el espacio y en el tiempo. Recibe flujos de datos de posición y sensores de varios drones y predice dónde es probable que vuele cada uno en los siguientes segundos. Estas predicciones ayudan a un planificador de mayor nivel a escoger trayectorias que sean seguras y bien coordinadas. Antes de que comience el aprendizaje, el sistema limpia y estandariza cuidadosamente los datos entrantes usando una técnica llamada normalización por cuantiles, que hace comparables las distintas lecturas de sensores y reduce el ruido.

Tres motores de aprendizaje trabajando juntos
El corazón de NTP-MMDA es un conjunto de tres componentes de aprendizaje profundo que cada uno “ve” el problema desde un ángulo distinto. El primero, una unidad recurrente con compuertas bidireccional (BiGRU), está diseñada para capturar cómo evolucionan las posiciones de los drones en el tiempo, observando hacia atrás y hacia adelante en una secuencia de vuelo para entender los patrones de movimiento. El segundo, un autoencoder variacional (VAE), aprende una representación comprimida interna de trayectorias típicas y puede modelar la incertidumbre —útil cuando las condiciones cambian o los datos están incompletos. El tercero, una red de creencias profundas adaptativa (ADBN), está construida para extraer patrones por capas y relaciones no lineales en los datos, y en este trabajo se adapta para producir coordenadas continuas en lugar de etiquetas de clase simples. Sus salidas se fusionan en una única predicción de la trayectoria futura de cada dron.
Demostración del sistema con datos de vuelos reales
El modelo NTP-MMDA fue probado en un conjunto de datos de trayectorias de drones de acceso público que contiene rutas de vuelo reales de múltiples drones. El estudio comparó el nuevo sistema con varios métodos establecidos, incluyendo bosques aleatorios, regresión clásica, redes recurrentes independientes y técnicas de coincidencia de características. En medidas clave de error de predicción —como el error cuadrático medio y el error absoluto medio— el nuevo modelo produjo consistentemente errores menores para tres drones distintos, es decir, sus posiciones predichas estuvieron más cerca de las trayectorias reales. No solo mejoró la precisión, sino que también funcionó más rápido, con menores demandas computacionales medidas en operaciones, uso de memoria y tiempo de inferencia. Pruebas de "ablación" cuidadosas, en las que cada uno de los tres componentes de aprendizaje se eliminó por turno, mostraron que los tres contribuyen, pero la combinación completa funciona mejor.
Qué significa esto para el uso cotidiano de drones
Para el público general, la conclusión es que esta investigación demuestra una forma más confiable de prever dónde estará cada dron en un grupo, unos segundos antes. Con mejor previsión, los drones pueden elegir automáticamente rutas que sean fluidas, eficientes y libres de colisiones, incluso en entornos concurridos o peligrosos como zonas de desastre o terrenos agrícolas complejos. Dado que el sistema alcanza alta precisión utilizando relativamente poca potencia de cálculo, es adecuado para su uso práctico y en tiempo real en plataformas con recursos limitados. A medida que las operaciones con múltiples drones se vuelvan más comunes en respuesta a emergencias, vigilancia ambiental y servicios comerciales, enfoques como NTP-MMDA podrían ayudar a mantener nuestros cielos más seguros y a que nuestros asistentes autónomos sean más capaces.
Cita: Alzahrani, A. Harnessing multi-modal deep learning for multi-drone navigation-based trajectory prediction system. Sci Rep 16, 12670 (2026). https://doi.org/10.1038/s41598-026-42180-0
Palabras clave: navegación multi-dron, predicción de trayectorias, aprendizaje profundo, evitación de colisiones, UAVs autónomos