Clear Sky Science · ja
マルチモーダル深層学習を活用したマルチドローン航行ベースの軌道予測システム
より賢い空 — 協力するドローンのために
捜索救助活動や作物監視、荷物配送に至るまで、複数のドローンが混雑し予測不能な空域をともに飛行することが増えています。これらの編隊が衝突を起こさずに迅速に目的を達成するようにするのは難しい課題です。本稿は、複数ドローンの動きを予測して経路をリアルタイムに高精度かつ低い計算コストで調整できる、新しい人工知能システムを提示します。
多数のドローンを導くことが難しい理由
単一ドローンの安全な経路計画だけでも難題です。建物や樹木、悪天候を避けつつ効率的に目的地へ到達しなければなりません。複数のドローンが同一空域を共有すると問題はさらに厳しくなります。各機の判断が他の機に影響を与え、固定障害物と互いの衝突の両方を避ける必要があります。従来の計画手法はしばしば単一の目標(例えば領域のカバーや衝突回避)にのみ対処しがちで、安全性、効率性、滑らかな動きを同時に両立させること、特にハードウェアやオンボード計算資源が限られる状況では困難です。
協調飛行のための新しい“頭脳”
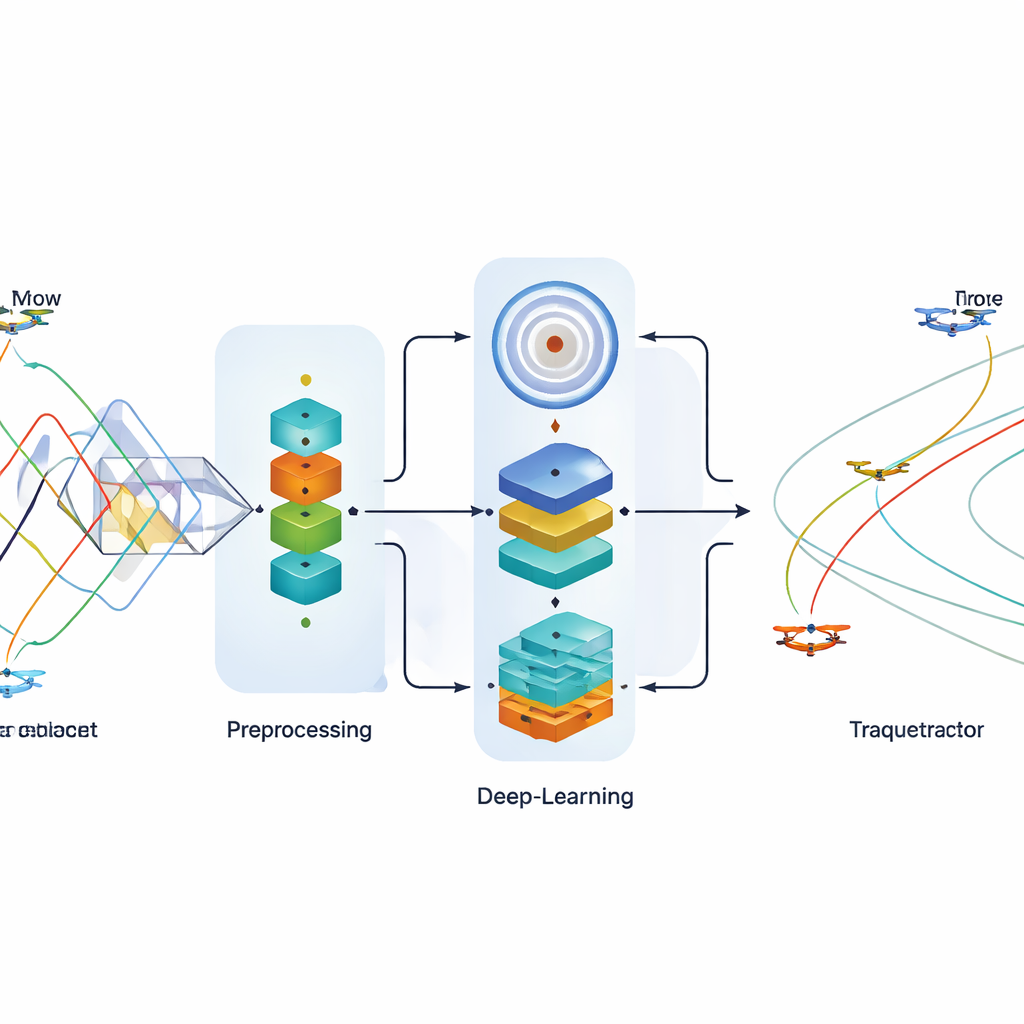
これに対処するために、著者はナビゲーションベースの軌道予測システム(Multi-Modal Deep Architectureを用いるNTP-MMDA)を提案します。簡単に言えば、このシステムは過去の飛行データからドローンが時空間的にどのように動くかを学習する共有の“頭脳”として機能します。複数のドローンからの位置情報やセンサーデータの流れを受け取り、各ドローンが数秒先にどこへ飛ぶ可能性が高いかを予測します。これらの予測は上位のプランナーが安全で協調した経路を選ぶのに役立ちます。学習を始める前に、システムは分位正規化(quantile normalization)と呼ばれる手法で入力データを丁寧に整備・標準化し、異なるセンサ計測を比較可能にしノイズを低減します。

三つの学習エンジンが協働する
NTP-MMDAの中心は、問題を異なる視点から捉える三つの深層学習コンポーネントのアンサンブルです。第一は双方向ゲート付き再帰ユニット(BiGRU)で、飛行シーケンスの前後を参照しつつドローンの位置が時間とともにどう変化するかを捉えます。第二は変分オートエンコーダ(VAE)で、典型的な軌道の圧縮された内部表現を学び、不確実性を扱える点が、条件が変化したりデータが不完全な場合に有用です。第三は適応型ディープビリーフネットワーク(ADBN)で、階層的パターンや非線形関係を抽出するよう設計され、本研究では単純なクラスラベルではなく連続座標を出力するよう調整されています。これらの出力を融合して、各ドローンの将来軌道を予測します。
実際の飛行データでの検証
NTP-MMDAモデルは、複数ドローンの実飛行軌道を含む公開ドローン軌道データセットで評価されました。本研究は新しいシステムをランダムフォレスト、従来の回帰、単独の再帰ネットワーク、特徴マッチング手法などの既存手法と比較しました。平均二乗誤差や平均絶対誤差といった主要な予測誤差指標で、新モデルは三機の異なるドローンに対して一貫して小さい誤差を示し、予測位置が実際の飛行経路により近いことを示しました。精度が向上しただけでなく、演算量、メモリ使用、推論時間といった計算コストも低く、より高速に動作しました。各学習コンポーネントを順に除去するアブレーション実験により三要素すべてが寄与していることが示され、全体の組み合わせが最良であることが確認されました。
日常のドローン利用に与える意味
一般向けの結論として、この研究は編隊にいる各ドローンが短時間先にどこにいるかをより確実に予測する手法を示しています。先を見通せれば、ドローンは自動的に滑らかで効率的、かつ衝突のない経路を選べるようになり、災害現場や複雑な農地などの混雑・危険な環境でも有用です。高い精度を比較的少ない計算資源で達成するため、資源制約のあるプラットフォームでの実時間運用に適しています。今後、緊急対応、環境モニタリング、商業サービスでのマルチドローン運用が一般化するにつれて、NTP-MMDAのような手法は空の安全性を高め、自律的な支援システムの能力を向上させる可能性があります。
引用: Alzahrani, A. Harnessing multi-modal deep learning for multi-drone navigation-based trajectory prediction system. Sci Rep 16, 12670 (2026). https://doi.org/10.1038/s41598-026-42180-0
キーワード: マルチドローン航行, 軌道予測, 深層学習, 衝突回避, 自律UAV