Clear Sky Science · pt
Aproveitando aprendizado profundo multimodal para um sistema de previsão de trajetórias baseado em navegação para múltiplos drones
Céus mais inteligentes para drones úteis
De missões de busca e resgate ao monitoramento de plantações e entrega de encomendas, equipes de drones são cada vez mais solicitadas a voar juntas por espaços aéreos congestionados e imprevisíveis. Manter essas frotas sem colisões enquanto alcançam seus objetivos de forma rápida é um exercício complexo. Este artigo apresenta um novo sistema de inteligência artificial que aprende a prever como múltiplos drones irão se mover, permitindo que suas trajetórias sejam coordenadas em tempo real com alta precisão e baixo custo computacional.
Por que guiar muitos drones é tão difícil
Planejar um trajeto seguro para um único drone já é desafiador: ele precisa contornar edifícios, árvores e condições meteorológicas adversas ao mesmo tempo em que alcança seu destino de maneira eficiente. Quando vários drones compartilham o mesmo espaço aéreo, o problema se torna muito mais complexo. As decisões de cada máquina afetam as demais, e todas devem evitar tanto obstáculos fixos quanto umas às outras. Métodos tradicionais de planejamento frequentemente tratam um objetivo por vez — como cobrir uma área ou evitar colisões — mas têm dificuldade em equilibrar segurança, eficiência e movimentos suaves simultaneamente, especialmente quando o hardware e os computadores embarcados são limitados.
Um novo “cérebro” para voo coordenado de drones
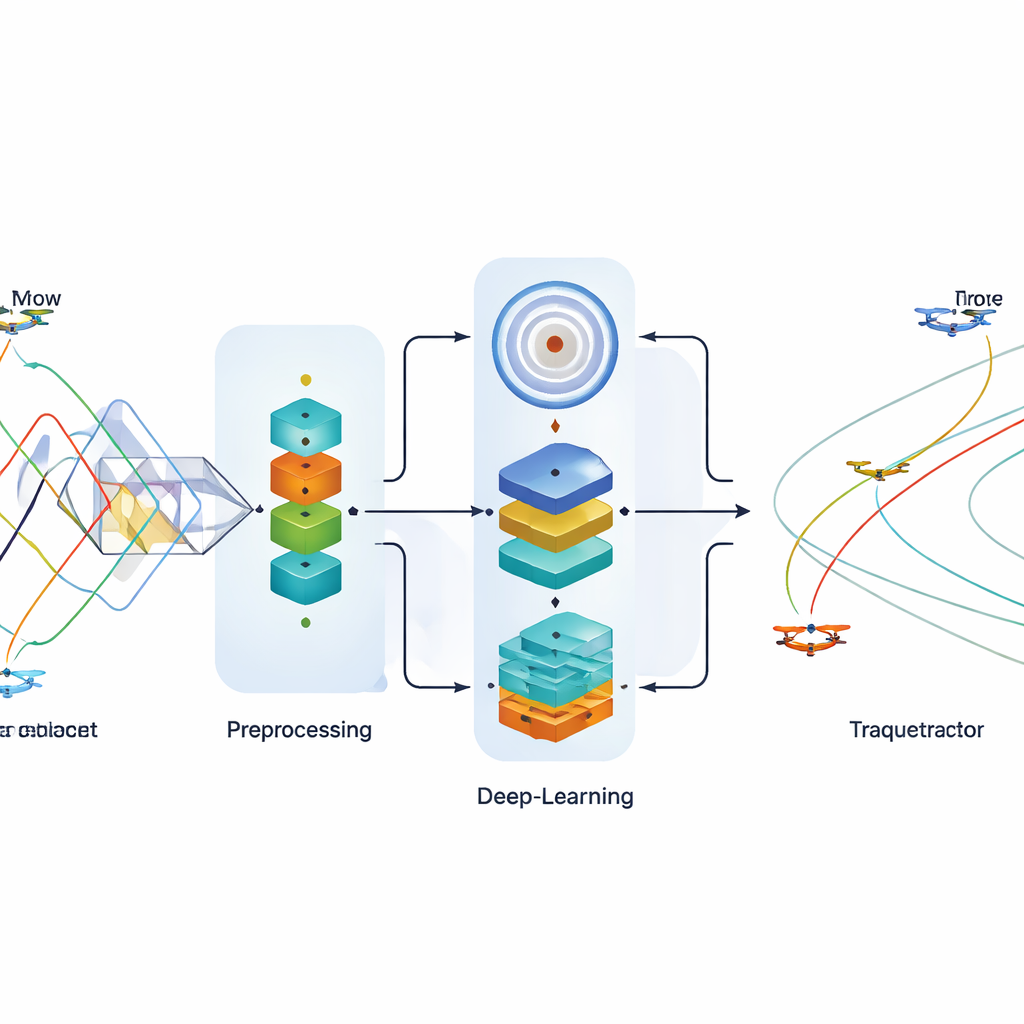
Para enfrentar isso, o autor introduz um Sistema de Previsão de Trajetória baseado em Navegação usando uma Arquitetura Profunda Multimodal, abreviado NTP-MMDA. Em termos simples, o sistema atua como um “cérebro” compartilhado que aprende com voos passados como os drones tendem a se mover no espaço e no tempo. Ele recebe fluxos de dados de posição e de sensores de vários drones e prevê onde cada um provavelmente irá voar a seguir, segundos à frente. Essas previsões ajudam um planejador de nível superior a escolher rotas seguras e bem coordenadas. Antes do início do aprendizado, o sistema limpa e padroniza cuidadosamente os dados de entrada usando uma técnica chamada normalização por quantis, que torna leituras de diferentes sensores comparáveis e reduz o ruído.

Três motores de aprendizado trabalhando juntos
O cerne do NTP-MMDA é um conjunto de três componentes de aprendizado profundo que “veem” o problema sob ângulos diferentes. O primeiro, uma unidade recorrente com porta bidirecional (BiGRU), foi projetado para capturar como as posições dos drones evoluem ao longo do tempo, olhando tanto para trás quanto para frente em uma sequência de voo para entender padrões de movimento. O segundo, um autoencoder variacional (VAE), aprende uma representação interna comprimida de trajetórias típicas e pode representar incerteza — útil quando as condições mudam ou os dados estão incompletos. O terceiro, uma rede de crença profunda adaptativa (ADBN), foi construída para extrair padrões em camadas e relações não lineares nos dados, e neste trabalho é adaptada para gerar coordenadas contínuas em vez de simples rótulos de classe. As saídas deles são fusionadas em uma única previsão da trajetória futura de cada drone.
Comprovando o sistema com dados de voos reais
O modelo NTP-MMDA foi testado em um conjunto de dados de trajetórias de drones disponível publicamente contendo rotas de voo reais de múltiplos drones. O estudo comparou o novo sistema com vários métodos estabelecidos, incluindo florestas aleatórias, regressão clássica, redes recorrentes isoladas e técnicas de correspondência de características. Em medidas-chave de erro de previsão — como erro quadrático médio e erro absoluto médio — o novo modelo produziu consistentemente equívocos menores para três drones diferentes, o que significa que suas posições previstas estavam mais próximas das trajetórias reais de voo. Ele não apenas melhorou a precisão, como também foi mais rápido, com menor demanda computacional medida em operações, uso de memória e tempo de inferência. Testes de “ablação” cuidadosos, nos quais cada um dos três componentes de aprendizado foi removido em sequência, mostraram que todos contribuem, mas a combinação completa funciona melhor.
O que isso significa para o uso cotidiano de drones
Para um leitor leigo, a conclusão é que esta pesquisa demonstra uma forma mais confiável de prever onde cada drone em um enxame estará alguns instantes à frente. Com melhor previsão, os drones podem escolher automaticamente rotas que sejam suaves, eficientes e livres de colisões, mesmo em ambientes movimentados ou perigosos, como zonas de desastre ou áreas agrícolas complexas. Como o sistema atinge alta precisão usando relativamente pouca potência computacional, ele é bem adequado para uso prático em tempo real em plataformas com recursos limitados. À medida que operações com múltiplos drones se tornam mais comuns em resposta a emergências, monitoramento ambiental e serviços comerciais, abordagens como o NTP-MMDA podem ajudar a manter nossos céus mais seguros e nossos assistentes autônomos mais capazes.
Citação: Alzahrani, A. Harnessing multi-modal deep learning for multi-drone navigation-based trajectory prediction system. Sci Rep 16, 12670 (2026). https://doi.org/10.1038/s41598-026-42180-0
Palavras-chave: navegação de múltiplos drones, previsão de trajetórias, aprendizado profundo, evitação de colisões, VANTs autônomos