Clear Sky Science · he
ניצול למידה עמוקה רב-מודלית למערכת חיזוי מסלולים מבוססת ניווט לריבוי רחפנים
שמיים חכמים לרחפנים מועילים
משימות חיפוש והצלה, ניטור גידולים ומשלוח חבילות — צוותים של רחפנים מתבקשים יותר ויותר לטוס יחד במרחבי אוויר צפופים ובלתי צפויים. לשמור על צי כזה מבלי שיתנגש ובמקביל לאפשר הגעה מהירה ליעד הוא מעשה איזון מורכב. מאמר זה מציג מערכת בינה מלאכותית חדשה שלומדת לחזות כיצד מספר רחפנים ינועו, כדי שתוכלו לתאם מסלולים בזמן אמת בדיוק רב ועלות חישוב נמוכה.
למה הכוונה של המונים כה קשה
תיכנון מסלול בטוח לרחפן יחיד הוא כבר אתגר: עליו להסתובב סביב מבנים, עצים ומזג אוויר גרוע ועדיין להגיע ליעד ביעילות. כאשר מספר רחפנים חולקים את אותו מרחב אווירי, הבעיה מסתבכת בהרבה. החלטות של מכונה אחת משפיעות על האחרות, וכולם חייבים להימנע מהמכשולים הקבועים וגם זה מזה. שיטות תכנון מסורתיות מטפלות לעתים במטרה אחת בכל רגע — כגון כיסוי שטח או הימנעות מהתנגשויות — אך מתקשות לאזן בין בטיחות, יעילות ותנועה חלקה בו־זמנית, במיוחד כאשר החומרה והמחשוב על הלוח מוגבלים.
מוח חדש לטיסת רחפנים מתואמת
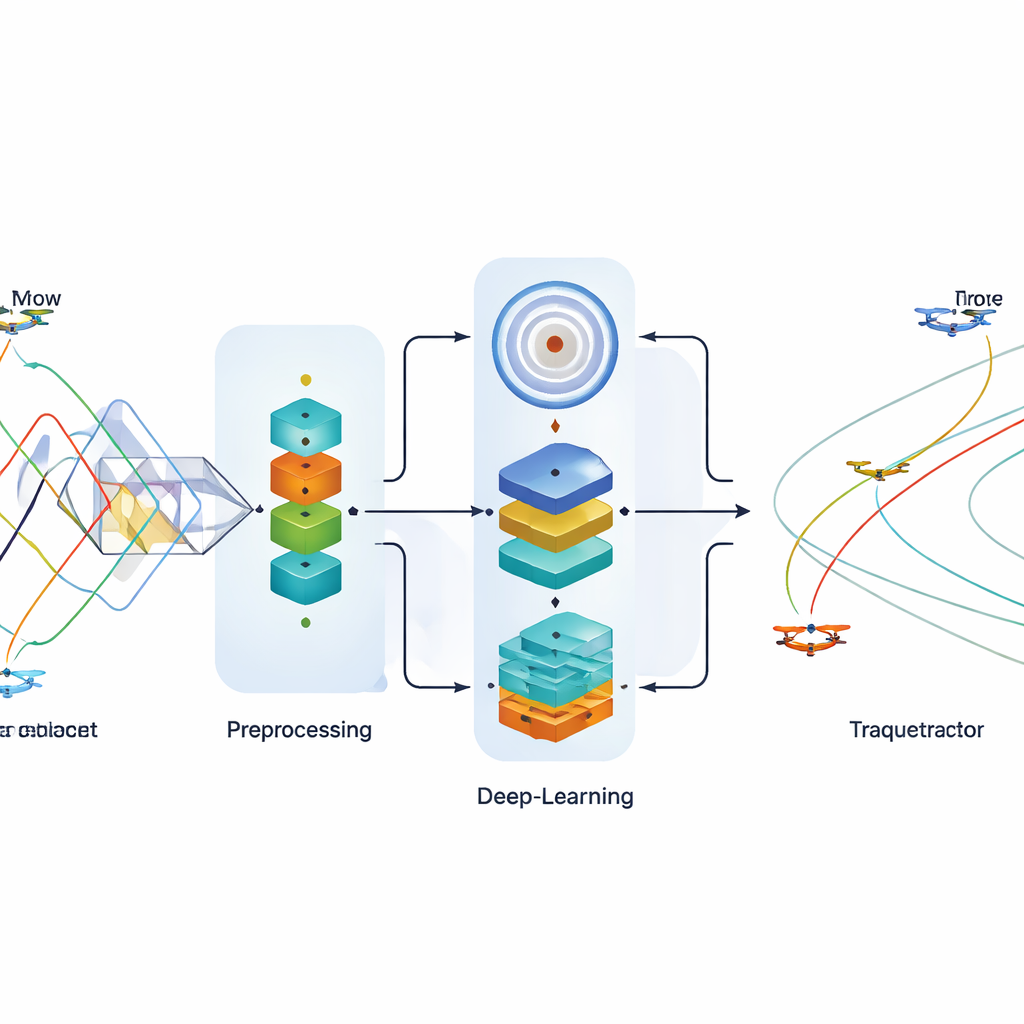
כדי להתמודד עם זאת, המחבר מציג מערכת חיזוי מסלול מבוססת ניווט בארכיטקטורה עמוקה רב־מודלית, שכונתה NTP-MMDA. בפשטות, המערכת פועלת כמין "מוח" משותף שלומד מטיסות קודמות כיצד רחפנים נוטים לנוע במרחב ובזמן. היא מקבלת זרמי נתוני מיקום וחיישנים ממספר רחפנים וצופה היכן כל אחד מהם צפוי לטוס בעתיד הקרוב, שניות קדימה. תחזיות אלה מסייעות למתכנן ברמה גבוהה לבחור מסלולים בטוחים ומתואמים היטב. לפני תחילת הלמידה המערכת מנקה ומתקננת בזהירות את הנתונים הנכנסים באמצעות טכניקה הנקראת נירמול רבעוני (quantile normalization), שמביאה להשוואת קריאות חיישנים שונות ומפחיתה רעש.

שלושה מנועי למידה שעובדים ביחד
לב NTP-MMDA הוא אנסמבל של שלושה רכיבי למידה עמוקה שכל אחד מהם "רואה" את הבעיה מזווית שונה. הראשון, יחידת זיכרון חוזרת שערכית דו-כיוונית (BiGRU), נועדה ללכוד כיצד מיקומי הרחפנים מתפתחים לאורך זמן, תוך הסתכלות אחורה וקדימה על רצף הטיסה כדי להבין דפוסי תנועה. השני, אוטו־אנקודר ואריאציוני (VAE), לומד תמונה פנימית דחוסה של מסלולים טיפוסיים ויכול לייצג אי־ודאות — שימושי כאשר התנאים משתנים או שהנתונים חלקיים. השלישי, רשת אמונה עמוקה אדפטיבית (ADBN), בנויה לחלץ דפוסים רב־שכבתיים וקשרים לא־ליניאריים בנתונים, ובעבודה זו מותאמת להפיק קואורדינטות רציפות במקום תוויות מחלקה פשוטות. הפלטים שלהם מאוגדים לניבוי יחיד של מסלול עתידי לכל רחפן.
הוכחת המערכת על נתוני טיסה אמיתיים
מודל NTP-MMDA נבחן על מאגר נתוני מסלולי רחפנים זמין לציבור המכיל מסלולי טיסה אמיתיים מכמה רחפנים. המחקר השווה את המערכת החדשה מול מספר שיטות מבוססות, כולל יערות אקראיים, רגרסיה קלאסית, רשתות חוזרות עצמאיות וטכניקות התאמת תכונות. במדדי שגיאת חיזוי מרכזיים — כגון שגיאה ממוצעת ריבועית ושגיאה ממוצעת מוחלטת — המודל החדש הפיק בעקביות טעויות קטנות יותר עבור שלושה רחפנים שונים, כלומר המיקומים שחזה היו קרובים יותר למסלולי הטיסה הממשיים. הוא לא רק שיפר את הדיוק אלא גם רץ מהר יותר, עם דרישות חישוב נמוכות יותר שנמדדו בכמויות פעולה, שימוש בזיכרון וזמן הסקת מסקנות. ניסויי "אבלציה" מדוקדקים, שבהם הוסר כל אחד משלושת רכיבי הלמידה בתורו, הראו שלכל אחד מהם יש תרומה, אך השילוב המלא עובד בצורה הטובה ביותר.
מה משמעות הדבר לשימוש יומיומי ברחפנים
עבור הקורא הכללי, המסקנה היא שהמחקר מראה דרך מהימנה יותר לחזות היכן יהיה כל רחפן בעדר, רגעים קדימה. עם תובנה טובה יותר, הרחפנים יכולים לבחור באופן אוטומטי מסלולים חלקים, יעילים וללא התנגשויות, אפילו בסביבות עמוסות או מסוכנות כגון אזורי אסון או חקלאות מורכבת. מאחר שהמערכת משיגה דיוק גבוה תוך שימוש בכוח חישוב יחסית נמוך, היא מתאימה לשימוש מעשי בזמן אמת על פלטפורמות עם משאבים מוגבלים. ככל שמבצעי ריבוי־רחפנים הופכים נפוצים יותר במענה לחירום, ניטור סביבתי ושירותים מסחריים, גישות כמו NTP-MMDA עשויות לסייע לשמור על שמיים בטוחים יותר ולעשות את העוזרים האוטונומיים שלנו מסוגלים יותר.
ציטוט: Alzahrani, A. Harnessing multi-modal deep learning for multi-drone navigation-based trajectory prediction system. Sci Rep 16, 12670 (2026). https://doi.org/10.1038/s41598-026-42180-0
מילות מפתח: ניווט ריבוי רחפנים, חיזוי מסלול, למידה עמוקה, מניעת התנגשויות, רחפנים אוטונומיים