Clear Sky Science · de
Multi-modales Deep Learning für ein Trajektorienvorhersagesystem zur Navigation mehrerer Drohnen
Klügere Lüfte für nützliche Drohnen
Von Such- und Rettungsmissionen über die Überwachung von Feldfrüchten bis hin zur Paketzustellung: Teams von Drohnen sollen zunehmend gemeinsam durch dichte, unvorhersehbare Lufträume fliegen. Diese Flotten kollisionsfrei zu halten und gleichzeitig ihre Ziele zügig zu erreichen, ist ein komplexer Balanceakt. Dieses Papier stellt ein neues KI-System vor, das lernt, wie sich mehrere Drohnen bewegen, sodass ihre Flugbahnen in Echtzeit mit hoher Genauigkeit und geringem Rechenaufwand koordiniert werden können.
Warum die Steuerung vieler Drohnen so schwierig ist
Die Planung eines sicheren Flugwegs für eine einzelne Drohne ist bereits anspruchsvoll: Sie muss Gebäude, Bäume und widrige Wetterbedingungen umfliegen und trotzdem ihr Ziel effizient erreichen. Wenn mehrere Drohnen denselben Luftraum teilen, wird die Aufgabe deutlich komplizierter. Die Entscheidungen jeder Maschine beeinflussen die anderen, und alle müssen sowohl feste Hindernisse als auch einander ausweichen. Traditionelle Planungsmethoden behandeln oft nur ein Ziel nach dem anderen — etwa Flächenabdeckung oder Kollisionsvermeidung — und haben Schwierigkeiten, Sicherheit, Effizienz und geschmeidige Bewegungen gleichzeitig auszubalancieren, besonders bei beschränkter Hardware und an Bord vorhandenen Computern.
Ein neues „Gehirn“ für koordinierten Drohnenflug
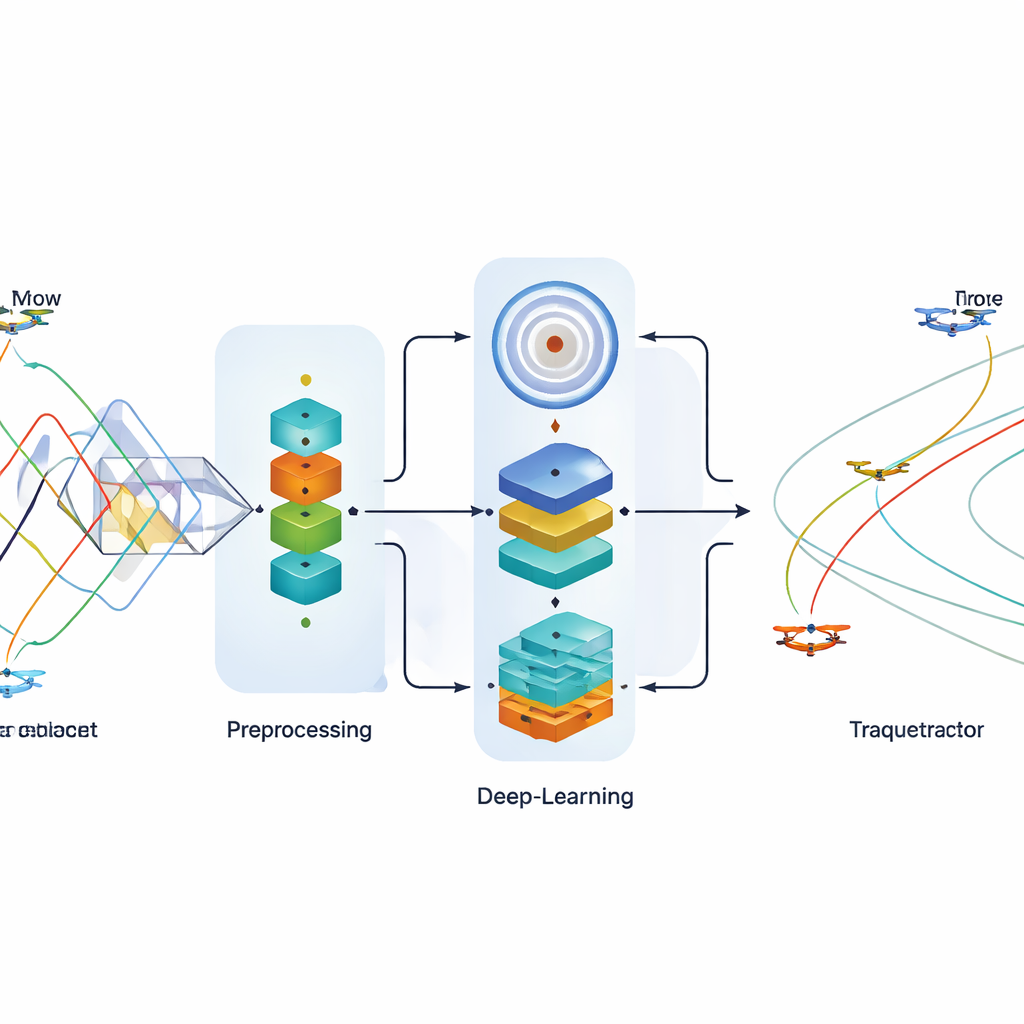
Um dem zu begegnen, führt der Autor ein navigationbasiertes Trajektorienvorhersagesystem mit einer multi-modalen Deep-Architektur ein, kurz NTP-MMDA. Vereinfacht gesagt fungiert das System als ein gemeinsames „Gehirn“, das aus vergangenen Flügen lernt, wie Drohnen sich räumlich und zeitlich bewegen. Es empfängt Positions- und Sensordatenströme mehrerer Drohnen und sagt voraus, wo sich jede innerhalb der nächsten Sekunden voraussichtlich befinden wird. Diese Vorhersagen unterstützen einen übergeordneten Planer bei der Auswahl sicherer und gut koordinierter Routen. Bevor das Lernen beginnt, bereinigt und standardisiert das System die eingehenden Daten sorgfältig mittels einer Technik namens Quantilnormalisierung, die verschiedene Sensormessungen vergleichbar macht und Rauschen reduziert.

Drei Lernmodule, die zusammenarbeiten
Das Herzstück von NTP-MMDA ist ein Ensemble aus drei Deep-Learning-Komponenten, die das Problem jeweils aus einem anderen Blickwinkel „sehen“. Die erste, eine bidirektionale Gated Recurrent Unit (BiGRU), ist darauf ausgelegt, zu erfassen, wie sich Drohnenpositionen über die Zeit entwickeln, indem sie entlang einer Flugsequenz sowohl rückwärts als auch vorwärts blickt, um Bewegungsmuster zu verstehen. Die zweite, ein variationaler Autoencoder (VAE), lernt ein komprimiertes internes Bild typischer Trajektorien und kann Unsicherheit abbilden — nützlich, wenn sich Bedingungen ändern oder Daten unvollständig sind. Die dritte, ein adaptives Deep Belief Network (ADBN), ist darauf ausgelegt, geschichtete Muster und nichtlineare Beziehungen in den Daten zu extrahieren und wurde hier so angepasst, dass es kontinuierliche Koordinaten statt einfacher Klassenlabels ausgibt. Deren Ausgaben werden zu einer einzigen Vorhersage für die zukünftige Bahn jeder Drohne verschmolzen.
Nachweis mit realen Flugdaten
Das NTP-MMDA-Modell wurde an einem frei verfügbaren Datensatz mit Drohnentrajektorien getestet, der reale Flugbahnen mehrerer Drohnen enthält. Die Studie verglich das neue System mit mehreren etablierten Methoden, darunter Random Forests, klassische Regression, eigenständige rekurrente Netze und Feature-Matching-Verfahren. Bei zentralen Fehlermaßen der Vorhersage — wie mittlerer quadratischer Fehler und mittlerer absoluter Fehler — lieferte das neue Modell für drei verschiedene Drohnen durchweg geringere Fehler, das heißt seine vorhergesagten Positionen lagen näher an den tatsächlichen Flugbahnen. Es verbesserte nicht nur die Genauigkeit, sondern arbeitete auch schneller und mit geringerem Rechenaufwand gemessen an Operationen, Speicherbedarf und Inferenzzeit. Sorgfältige „Ablations“-Tests, bei denen nacheinander jede der drei Lernkomponenten entfernt wurde, zeigten, dass alle drei beitrugen, das volle Zusammenspiel jedoch am besten funktionierte.
Was das für den Alltag mit Drohnen bedeutet
Für Laien ist die Kernbotschaft, dass diese Forschung eine zuverlässigere Methode demonstriert, um vorherzusagen, wo sich jede Drohne in einer Schwarmkonfiguration in den kommenden Momenten befinden wird. Mit besserer Vorhersicht können Drohnen automatisch Routen wählen, die geschmeidig, effizient und kollisionsfrei sind — selbst in dichtem oder gefährlichem Umfeld wie Katastrophengebieten oder komplexen Agrarflächen. Da das System hohe Genauigkeit bei vergleichsweise geringem Rechenaufwand erzielt, eignet es sich gut für den praktischen Echtzeinsatz auf ressourcenbeschränkten Plattformen. Mit zunehmender Verbreitung von Multi-Drohnen-Einsätzen in Notfallhilfe, Umweltüberwachung und kommerziellen Diensten könnten Ansätze wie NTP-MMDA dazu beitragen, unsere Lufträume sicherer zu machen und unsere autonomen Helfer leistungsfähiger.»
Zitation: Alzahrani, A. Harnessing multi-modal deep learning for multi-drone navigation-based trajectory prediction system. Sci Rep 16, 12670 (2026). https://doi.org/10.1038/s41598-026-42180-0
Schlüsselwörter: Navigation mehrerer Drohnen, Trajektorienvorhersage, Deep Learning, Kollisionsvermeidung, autonome UAVs