Clear Sky Science · tr
Çoklu İHA navigasyonu tabanlı yolculuk tahmin sistemi için çok modlu derin öğrenmenin kullanımı
Yardımcı İHA’lar için Daha Akıllı Gökyüzü
Arama-kurtarma görevlerinden ürün takibine ve paket teslimine kadar, İHA ekipleri giderek daha fazla kalabalık ve öngörülemez hava sahalarında birlikte uçmaları için talep görüyor. Bu filoların çarpışmasını engellerken hedeflerine hızlıca ulaşmalarını sağlamak karmaşık bir denge gerektirir. Bu makale, birden çok İHA’nın nasıl hareket edeceğini öğrenen yeni bir yapay zeka sistemi sunuyor; böylece yollar gerçek zamanlı olarak yüksek doğrulukla ve düşük hesaplama maliyetiyle koordine edilebiliyor.
Çok Sayıda İHA’yı Yönlendirmenin Zorluğu
Tek bir İHA için güvenli bir rota planlamak bile zaten zordur: hedefe verimli şekilde ulaşırken binalar, ağaçlar ve kötü hava koşullarının etrafından dolaşması gerekir. Birden çok İHA aynı hava sahasını paylaştığında sorun çok daha karmaşık hale gelir. Her makinenin kararları diğerlerini etkiler ve hepsi hem sabit engellerden hem de birbirlerinden kaçınmalıdır. Geleneksel planlama yöntemleri genellikle bir hedefi aynı anda ele alır—örneğin bir bölgeyi kapsamak ya da çarpışmalardan kaçınmak—ancak özellikle donanım ve uçtaki bilgisayarlar sınırlıysa güvenlik, verimlilik ve düzgün hareketi bir arada dengelemekte zorlanırlar.
Koordine İHA Uçuşu için Yeni Bir Beyin
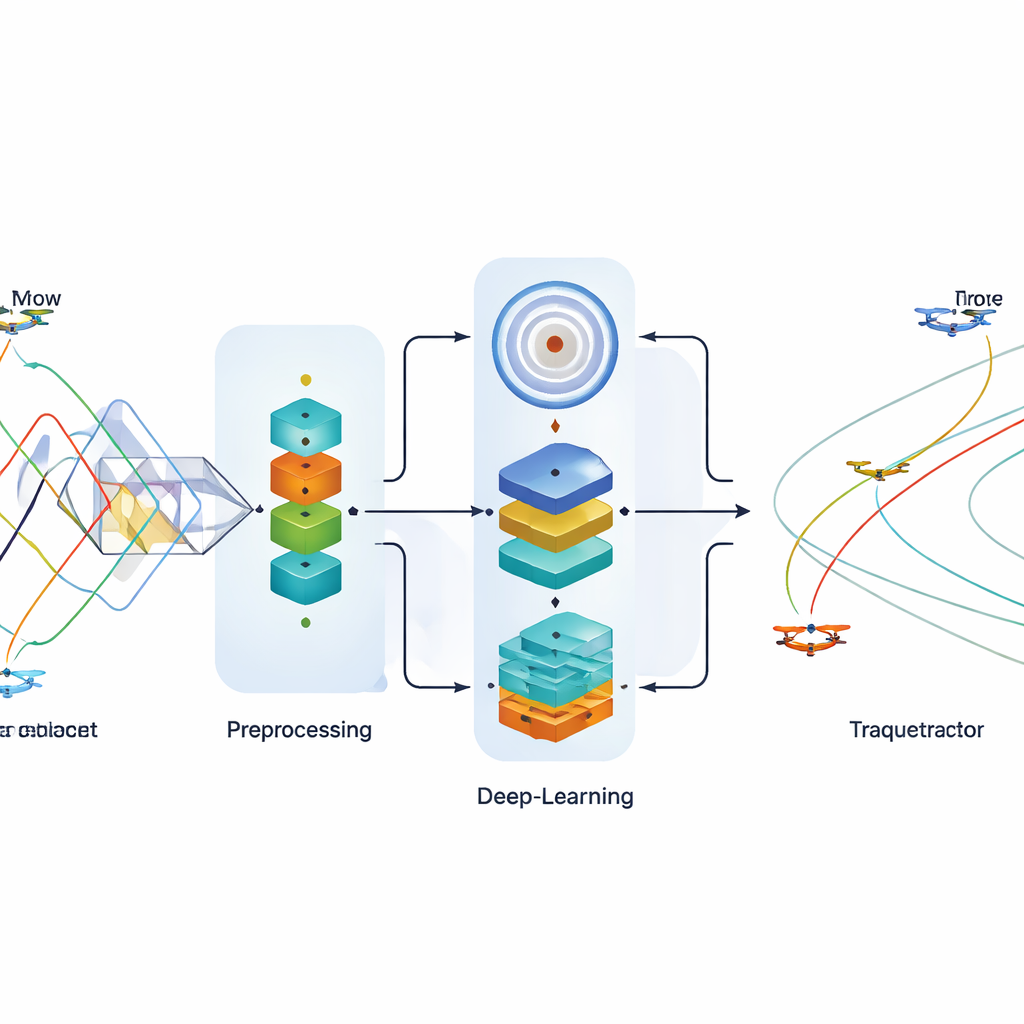
Bunu ele almak için yazar, Çok Modlu Derin Mimarili Navigasyon Tabanlı Yolculuk Tahmin Sistemi (NTP-MMDA) adını verdiği bir yöntem tanıtıyor. Basitçe söylemek gerekirse sistem, geçmiş uçuşlardan İHA’ların uzay ve zaman içinde nasıl hareket etme eğiliminde olduğunu öğrenen paylaşılan bir “beyin” gibi davranıyor. Birden çok İHA’dan gelen konum ve sensör veri akışlarını alıyor ve her birinin sonraki birkaç saniyede nereye uçma olasılığı olduğunu tahmin ediyor. Bu tahminler, üst düzey bir planlayıcının güvenli ve iyi koordine edilmiş rotalar seçmesine yardımcı oluyor. Öğrenme başlamadan önce sistem, gelen verileri quantile normalizasyonu adı verilen bir teknikle dikkatle temizliyor ve standartlaştırıyor; bu, farklı sensör okumalarını karşılaştırılabilir kılıyor ve gürültüyü azaltıyor.

Birlikte Çalışan Üç Öğrenme Motoru
NTP-MMDA’nın kalbi, her biri problemi farklı bir açıdan “gören” üç derin öğrenme bileşeninden oluşan bir ansambladır. Birincisi, çift yönlü kapılı yinelenen birim (BiGRU), İHA konumlarının zaman içinde nasıl evrildiğini yakalamak üzere tasarlanmıştır; uçuş dizisi boyunca geriye ve ileriye bakarak hareket kalıplarını anlar. İkincisi, varyasyonel otomatik kodlayıcı (VAE), tipik trajelerin sıkıştırılmış içsel bir temsilini öğrenir ve belirsizliği modelleyebilir—bu, koşullar değiştiğinde veya veriler eksik olduğunda faydalıdır. Üçüncüsü, adaptif derin inanç ağı (ADBN), verilerde katmanlı kalıpları ve doğrusal olmayan ilişkileri çıkarmak için inşa edilmiştir ve bu çalışmada basit sınıf etiketleri yerine sürekli koordinatlar üretecek şekilde uyarlanmıştır. Bu bileşenlerin çıktıları bir araya getirilerek her İHA’nın gelecekteki yolunun tek bir tahmini oluşturulur.
Sistemin Gerçek Uçuş Verilerinde Kanıtlanması
NTP-MMDA modeli, birden çok İHA’dan gerçek uçuş yolları içeren açık olarak erişilebilir bir İHA yolculuk veri seti üzerinde test edildi. Çalışma, yeni sistemi rastgele ormanlar, klasik regresyon, tek başına yinelenen ağlar ve özellik eşleştirme teknikleri dahil olmak üzere çeşitli yerleşik yöntemlerle karşılaştırdı. Ortalama kare hata ve ortalama mutlak hata gibi temel tahmin hata ölçütlerinde yeni model, üç farklı İHA için sürekli olarak daha küçük hatalar üretti; bu da tahmin edilen konumların gerçek uçuş yollarına daha yakın olduğu anlamına geliyor. Sadece doğruluğu artırmakla kalmadı, aynı zamanda işlem sayısı, bellek kullanımı ve çıkarım süresiyle ölçülen düşük hesaplama gereksinimleri sayesinde daha hızlı çalıştı. Her bir öğrenme bileşeninin sırayla kaldırıldığı dikkatli “ablasyon” testleri, üçünün de katkıda bulunduğunu fakat tam kombinasyonun en iyi sonucu verdiğini gösterdi.
Günlük İHA Kullanımı için Anlamı
Bir okur için çıkarım, bu araştırmanın bir sürünün içindeki her İHA’nın birkaç saniye sonrasının daha güvenilir bir şekilde tahmin edilebileceğini göstermesidir. Daha iyi öngörü ile İHA’lar, afet bölgeleri veya karmaşık tarım alanları gibi yoğun veya tehlikeli ortamlarda bile pürüzsüz, verimli ve çarpışmasız rotaları otomatik olarak seçebilir. Sistem nispeten az hesaplama gücü kullanırken yüksek doğruluk sağladığından kaynakları sınırlı platformlarda pratik, gerçek zamanlı kullanım için uygundur. Çoklu İHA operasyonları acil müdahale, çevresel izleme ve ticari hizmetlerde daha yaygın hale geldikçe, NTP-MMDA gibi yaklaşımlar gökyüzümüzü daha güvenli ve özerk yardımcılarımızı daha yetenekli kılmaya yardımcı olabilir.
Atıf: Alzahrani, A. Harnessing multi-modal deep learning for multi-drone navigation-based trajectory prediction system. Sci Rep 16, 12670 (2026). https://doi.org/10.1038/s41598-026-42180-0
Anahtar kelimeler: çoklu İHA navigasyonu, yolculuk tahmini, derin öğrenme, çarpışma kaçınma, özerk İHA'lar