Clear Sky Science · pl
Wykorzystanie wielomodalnego głębokiego uczenia do systemu przewidywania trajektorii opartego na nawigacji wielu dronów
Inteligentniejsze niebo dla pomocnych dronów
Od misji poszukiwawczo-ratowniczych po monitorowanie upraw i dostarczanie przesyłek — zespoły dronów coraz częściej muszą latać razem przez zatłoczone, nieprzewidywalne przestrzenie powietrzne. Utrzymanie tych flot z dala od kolizji przy jednoczesnym szybkim osiąganiu celów to skomplikowane żonglowanie. Artykuł przedstawia nowy system sztucznej inteligencji, który uczy się przewidywać ruch wielu dronów, aby ich trasy mogły być koordynowane w czasie rzeczywistym z wysoką dokładnością i niskim kosztem obliczeniowym.
Dlaczego kierowanie wieloma dronami jest tak trudne
Zaplanowanie bezpiecznej trasy dla pojedynczego drona jest już wyzwaniem: musi omijać budynki, drzewa i niekorzystne warunki pogodowe, jednocześnie efektywnie docierając do celu. Gdy kilka dronów dzieli tę samą przestrzeń powietrzną, problem staje się znacznie trudniejszy. Decyzje każdego urządzenia wpływają na pozostałe, a wszystkie muszą unikać zarówno stałych przeszkód, jak i siebie nawzajem. Tradycyjne metody planowania często radzą sobie z jednym zadaniem naraz — na przykład z pokryciem obszaru lub unikaniem kolizji — ale mają trudności z jednoczesnym zrównoważeniem bezpieczeństwa, wydajności i płynności ruchu, szczególnie gdy sprzęt i komputery pokładowe mają ograniczone zasoby.
Nowy „mózg” do skoordynowanego lotu dronów
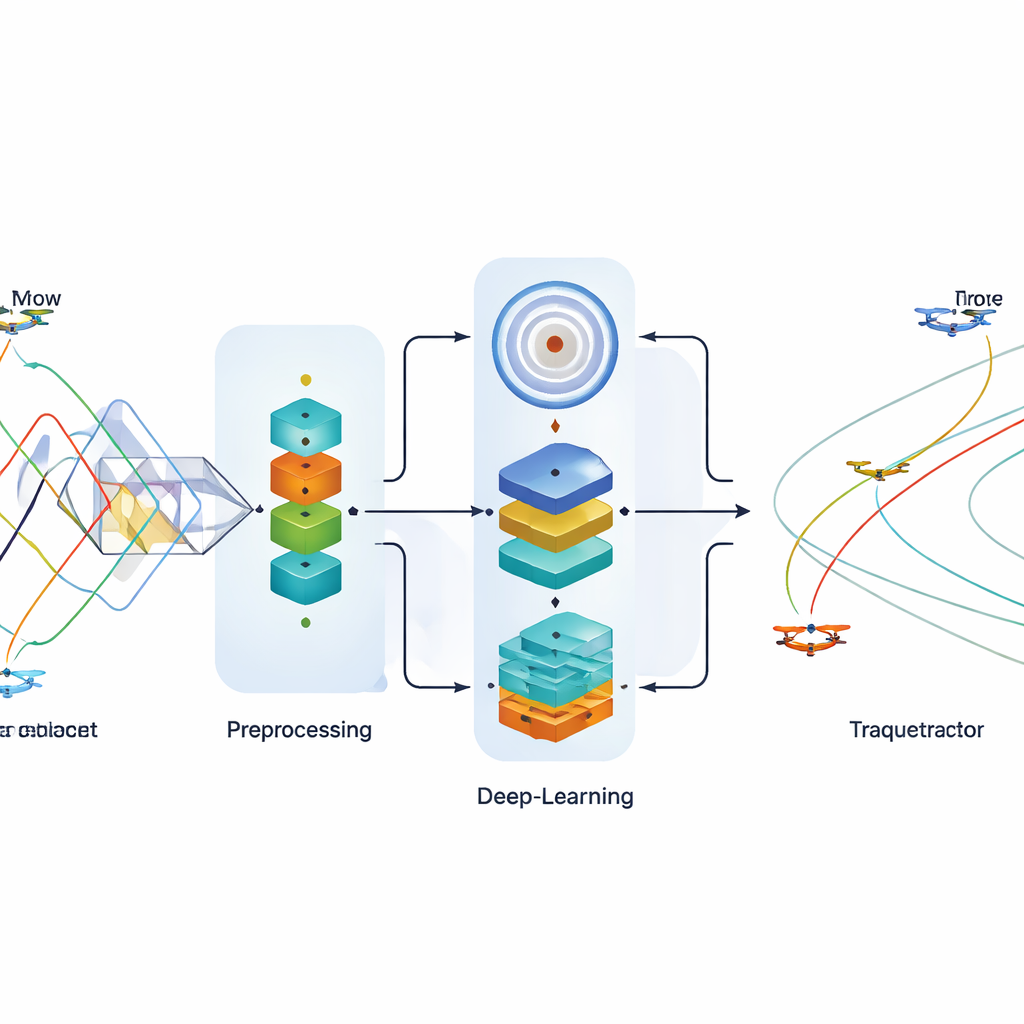
Aby temu sprostać, autor wprowadza system przewidywania trajektorii oparty na nawigacji z wielomodalną architekturą głęboką, nazwany NTP-MMDA. Mówiąc prościej, system działa jako wspólny „mózg”, który uczy się z przeszłych lotów, jak drony zwykle poruszają się w przestrzeni i czasie. Otrzymuje strumienie danych pozycji i czujników od kilku dronów i przewiduje, gdzie każdy z nich prawdopodobnie poleci dalej, na kilka sekund naprzód. Te prognozy pomagają wyższemu poziomowi planującemu wybierać trasy bezpieczne i dobrze skoordynowane. Zanim rozpocznie się uczenie, system starannie oczyszcza i standaryzuje nadchodzące dane za pomocą techniki zwanej normalizacją kwantylową, która ułatwia porównywanie różnych odczytów czujników i redukuje szum.

Trzy silniki uczące pracujące razem
Serce NTP-MMDA stanowi zespół trzech komponentów głębokiego uczenia, z których każdy „widzi” problem z innej perspektywy. Pierwszy, dwukierunkowa bramka typu GRU (BiGRU), został zaprojektowany, by uchwycić, jak pozycje dronów zmieniają się w czasie, patrząc zarówno wstecz, jak i w przód w sekwencji lotu, by zrozumieć wzorce ruchu. Drugi, wariacyjny autoenkoder (VAE), uczy się skompresowanego wewnętrznego obrazu typowych trajektorii i potrafi reprezentować niepewność — co jest przydatne, gdy warunki się zmieniają lub dane są niekompletne. Trzeci, adaptacyjna głęboka sieć przekonań (ADBN), ma za zadanie wydobywać wielowarstwowe wzorce i nieliniowe zależności w danych; w tej pracy zaadaptowano ją do generowania ciągłych współrzędnych zamiast prostych etykiet klas. Ich wyjścia są łączone w pojedyncze przewidywanie przyszłej ścieżki każdego drona.
Weryfikacja systemu na rzeczywistych danych lotów
Model NTP-MMDA testowano na ogólnodostępnym zbiorze danych trajektorii dronów zawierającym rzeczywiste ścieżki lotu wielu dronów. Badanie porównało nowy system z kilkoma ugruntowanymi metodami, w tym lasami losowymi, klasyczną regresją, samodzielnymi sieciami rekurencyjnymi oraz technikami dopasowywania cech. W kluczowych miarach błędu predykcji — takich jak błąd średniokwadratowy i błąd bezwzględny średni — nowy model konsekwentnie popełniał mniejsze błędy dla trzech różnych dronów, co oznacza, że przewidywane pozycje były bliższe faktycznym ścieżkom lotu. Poprawił nie tylko dokładność, ale też działał szybciej, z mniejszymi wymaganiami obliczeniowymi mierzonymi w operacjach, użyciu pamięci i czasie inferencji. Starannie przeprowadzone testy „ablacyjne”, w których kolejno usuwano każdy z trzech komponentów uczących, wykazały, że wszystkie trzy wnoszą wkład, lecz najlepsze rezultaty osiąga pełne połączenie.
Co to oznacza dla codziennego wykorzystania dronów
Dla osoby niebędącej specjalistą wniosek jest taki, że badania te demonstrują bardziej niezawodny sposób prognozowania, gdzie znajdzie się każdy dron w stadzie, kilka chwil do przodu. Dzięki lepszej przewidywalności drony mogą automatycznie wybierać trasy, które są płynne, wydajne i wolne od kolizji, nawet w zatłoczonych lub niebezpiecznych warunkach, takich jak strefy katastrof czy skomplikowane gospodarstwa rolne. Ponieważ system osiąga wysoką dokładność przy stosunkowo niskim zapotrzebowaniu na moc obliczeniową, nadaje się do praktycznego, czasu rzeczywistego wykorzystania na platformach o ograniczonych zasobach. W miarę jak operacje z użyciem wielu dronów stają się powszechniejsze w reagowaniu kryzysowym, monitoringu środowiska i usługach komercyjnych, podejścia takie jak NTP-MMDA mogą pomóc utrzymać nasze niebo bezpieczniejszym, a autonomiczne urządzenia bardziej efektywnymi.
Cytowanie: Alzahrani, A. Harnessing multi-modal deep learning for multi-drone navigation-based trajectory prediction system. Sci Rep 16, 12670 (2026). https://doi.org/10.1038/s41598-026-42180-0
Słowa kluczowe: nawigacja wielu dronów, przewidywanie trajektorii, głębokie uczenie, unikanie kolizji, autonomiczne UAV