Clear Sky Science · zh
朝着基于速度的前指软组织非线性弹性以便制定规范
为什么机器人与人类指尖接触很重要
随着机器人走出围栏并开始与人并肩工作,意外碰撞和夹伤难以避免。我们的手指,尤其是指背,常常最接近移动的工具和部件,但现行的安全规则仍然依赖对其能承受多少力的粗略估计。本研究聚焦一个看似简单却影响深远的问题:当机器人以不同速度按压你前指的指背时,这种软组织到底如何反抗?把这种知识用于何处,又如何让机器人更安全?
仔细审视一个脆弱部位
研究者将注意力集中在前指的背侧,这是装配和搬运任务中经常暴露的区域,但在现有安全标准中很大程度上被忽视。现行国际指南(如 ISO/TS 15066)对手部某些部位给出了力和压力的限值,但其对人体软组织的模型非常粗糙。它们要么把皮肤当作简单弹簧,要么依赖难以直接转化为实际安全规则的复杂公式。研究团队试图建立一种中间方案:既能捕捉人体组织的真实非线性行为,又足够简单,能直接用于机器人设计和安全规范。
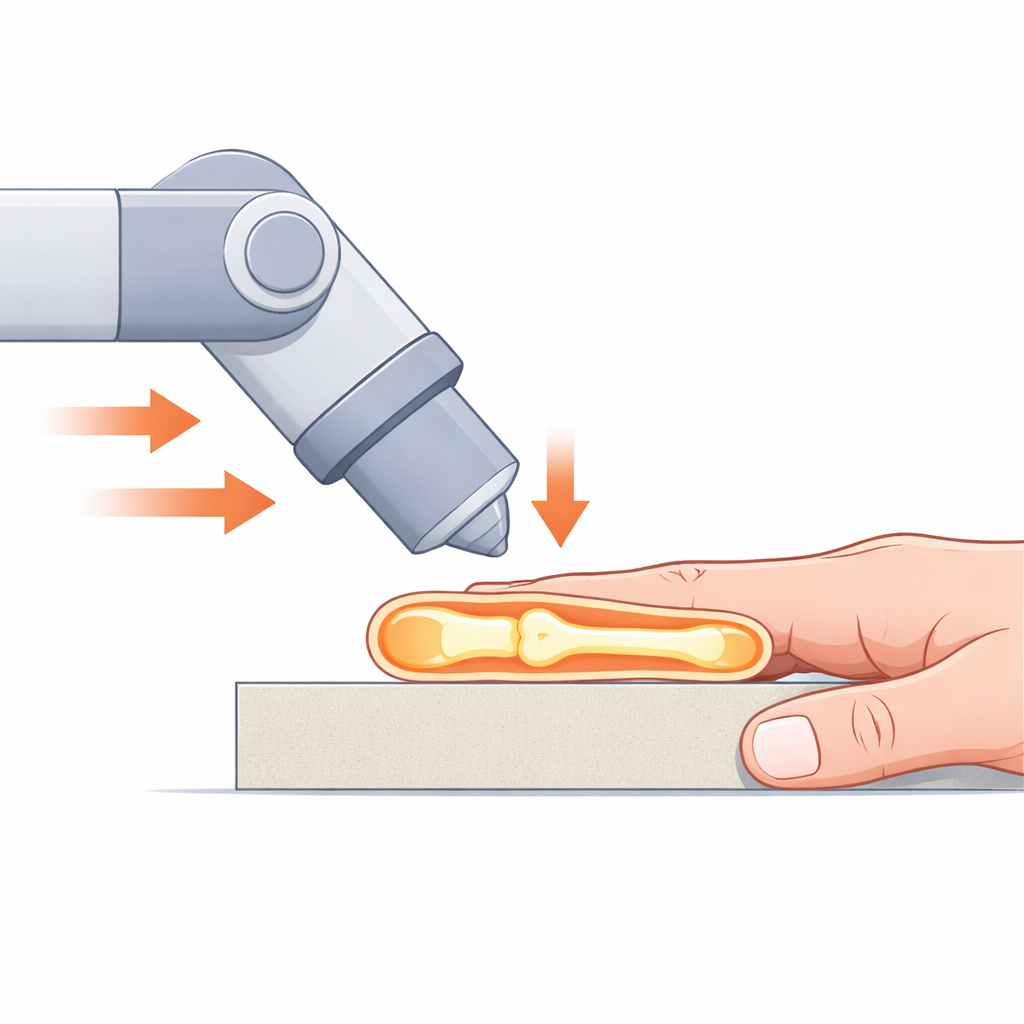
他们如何将机器人温和地撞上手指
为安全起见,作者构建了一个试验装置:一台工业机器人手臂带着光滑的圆柱形金属冲头,垂直下压到志愿者前指的背部。手指下方有支撑,模拟可能特别危险的夹持或压挤情形。保护装置确保在力过大时支撑会滑开释放手指。传感器记录冲头的位移、产生的力以及接触开始和结束的精确时刻。共有117名志愿者参与,年龄19至89岁。对每位参与者,机器人以四种受控速度按压——从非常缓慢(近乎静态)到相当快速——使团队能够绘制出在不同接触速度下力随指压缩变化的曲线。
构建一个简单但现实的刚度模型
从这些受控冲击中,团队提取出指压缩量与反作用力之间的关系。他们比较了三种数学描述。传统的双线性模型假定存在两段直线刚度并在其间有尖锐拐点。指数模型曲线平滑,但不能表现出在小压缩时几乎线性的温和响应。研究人员引入了一种新的“三段”模型,该模型在低刚度和高刚度区间之间仍然存在,但用平滑的过渡连接它们,更像是柔和的弯曲而非尖角。通过精心调整一个参数以防止过拟合,他们在保持参数数量少且具物理意义的同时,与实验数据达到了极好的一致性。这使得该模型既现实又便于直接用于安全计算。
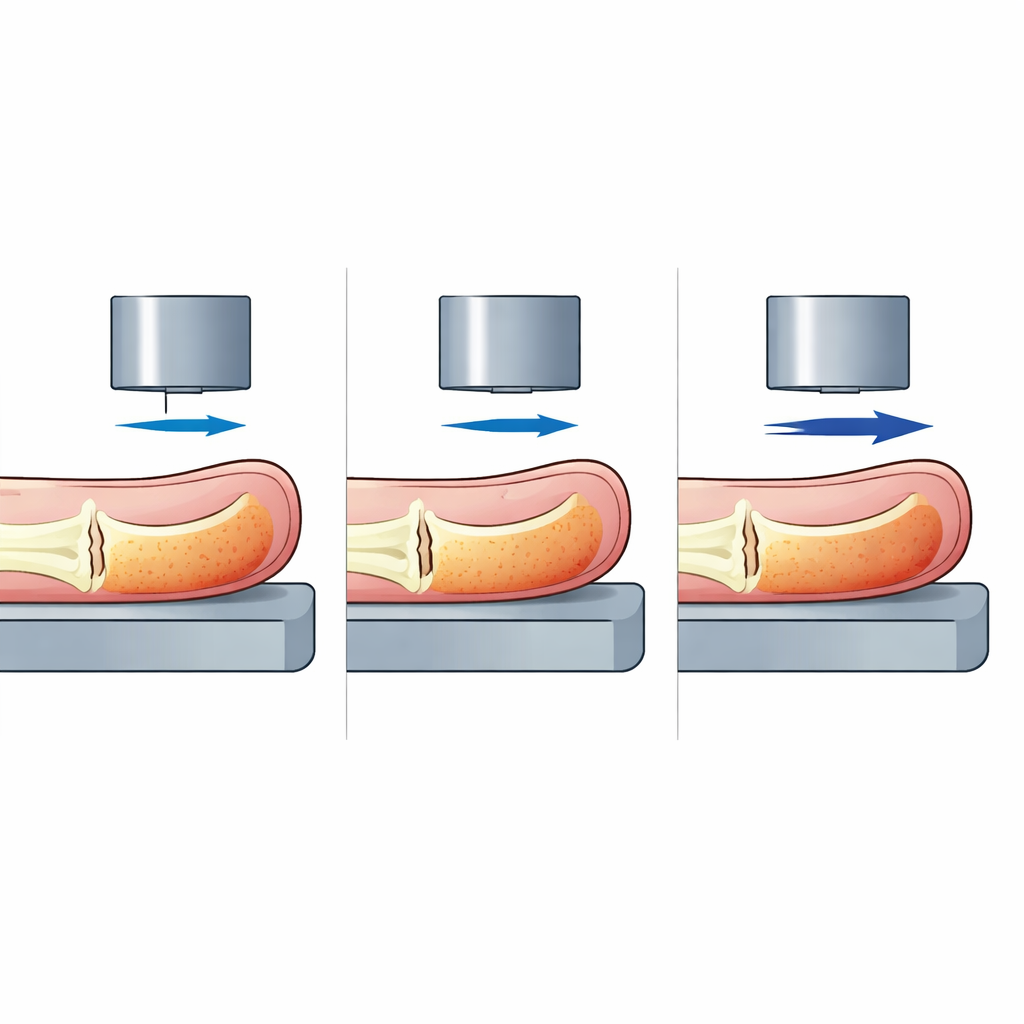
随速度变化的特征——以及不变的方面
有了模型,作者考察了其参数如何随冲击速度、性别和年龄而变化。他们发现一个明显趋势:有效刚度随着接触速度的升高而增加。换言之,当机器人按压得更快时,相同的指压缩会产生更大的力——这与活体组织的粘弹性特性一致。关键是,这种速度依赖性直接体现在模型参数中。相比之下,一旦对所有数据做统计分析后,男女之间以及不同年龄组之间的差异可以忽略不计。团队以每个速度下的参数中位数和上界(95百分位)总结他们的发现,然后将这些参数转化为位移—力曲线,既代表典型情况也代表最坏情形。
将生物力学洞见转化为更安全的机器
对非专业读者来说,主要结论很直接:机器人“感觉”到你手指的硬度很大程度上取决于其运动速度,本研究提供了一种清晰、定量的方法来捕捉这一效应。新的三段模型将机器人速度与前指被夹持时可能出现的最大力联系起来,提供了可直接嵌入安全标准和机器人控制策略的保守上界。超出前指之外,同样的方法可以适配到其他身体部位,帮助工程师设计出反应足够快且触感足够柔和的协作机器人,防止日常接触演变为伤害。
引用: Liu, J., Akiyama, Y., Fujikawa, T. et al. Towards velocity-dependent nonlinear elasticity of human forefinger soft tissue for specification construction. Sci Rep 16, 13454 (2026). https://doi.org/10.1038/s41598-026-40018-3
关键词: 人机交互, 软组织力学, 手指安全, 协作机器人, 生物力学建模