Clear Sky Science · en
Towards velocity-dependent nonlinear elasticity of human forefinger soft tissue for specification construction
Why robot–human touch on a fingertip matters
As robots move out of cages and begin working side by side with people, accidental bumps and pinches become inevitable. Our fingers, especially the backs of them, are often closest to moving tools and parts, yet safety rules still rely on crude guesses about how much force they can safely withstand. This study zeroes in on a surprisingly simple question with big consequences: when a robot presses on the back of your forefinger at different speeds, how does that soft tissue actually push back, and how can that knowledge make robots safer?
Taking a close look at a vulnerable spot
The researchers focused on the dorsal (back) side of the forefinger, a region frequently exposed during assembly and handling tasks but largely ignored in existing safety standards. Current international guidelines, such as ISO/TS 15066, provide limits for forces and pressures on parts of the hand, but their underlying models of human soft tissue are very rough. They either treat the skin as a simple spring or rely on highly complex formulas that are hard to translate into practical safety rules. The team set out to build a middle ground: a model that captures real, nonlinear behavior of human tissue while remaining simple enough to feed directly into robot design and safety specifications.
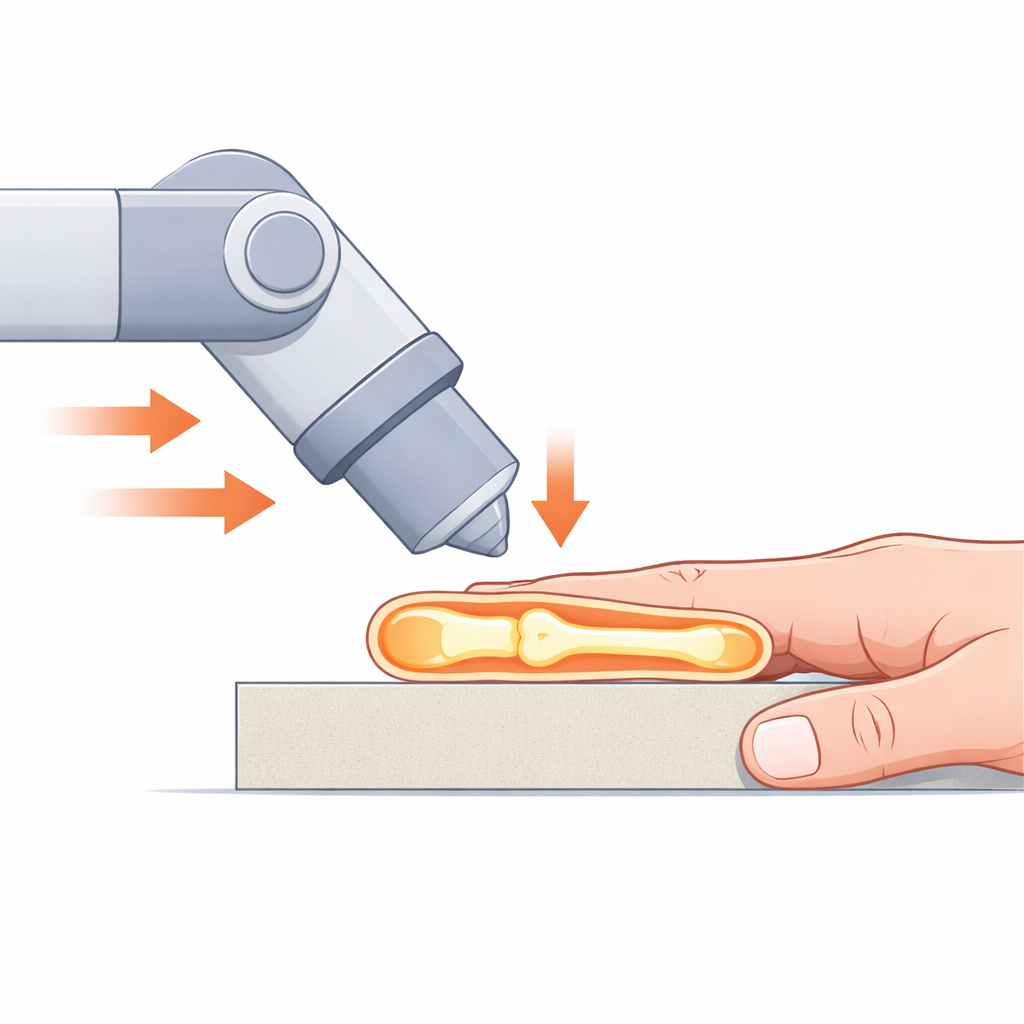
How they gently crash a robot into a finger
To study this safely, the authors built a test setup in which an industrial robot arm drove a smooth, rounded metal cylinder straight down onto the back of a volunteer’s forefinger. The finger was supported underneath, mimicking a clamping or pinching situation that can be particularly dangerous. Protective hardware ensured that, if forces grew too large, the support would slide away and release the finger. Sensors recorded how far the impactor moved, how much force developed, and exactly when contact began and ended. A total of 117 volunteers, aged 19 to 89, took part. For each person, the robot pressed at four controlled speeds—from very slow (almost static) to fairly fast—allowing the team to map out how force grew with finger compression under different contact velocities.
Building a simple yet realistic stiffness model
From these controlled impacts, the team extracted the relationship between how much the finger was squashed and the force pushing back. They compared three mathematical descriptions of this behavior. A traditional bi-linear model assumes two straight-line stiffness levels with a sharp kink between them. An exponential model curves smoothly but fails to show the nearly straight, gentle response seen at small compressions. The researchers introduced a new "three-stage" model that still has low- and high-stiffness regions but connects them with a smooth transition, more like a soft bend than a corner. By carefully tuning one parameter to prevent overfitting, they achieved excellent agreement with the experimental data while keeping the number of parameters small and physically meaningful. This makes the model both realistic and easy to plug into safety calculations.
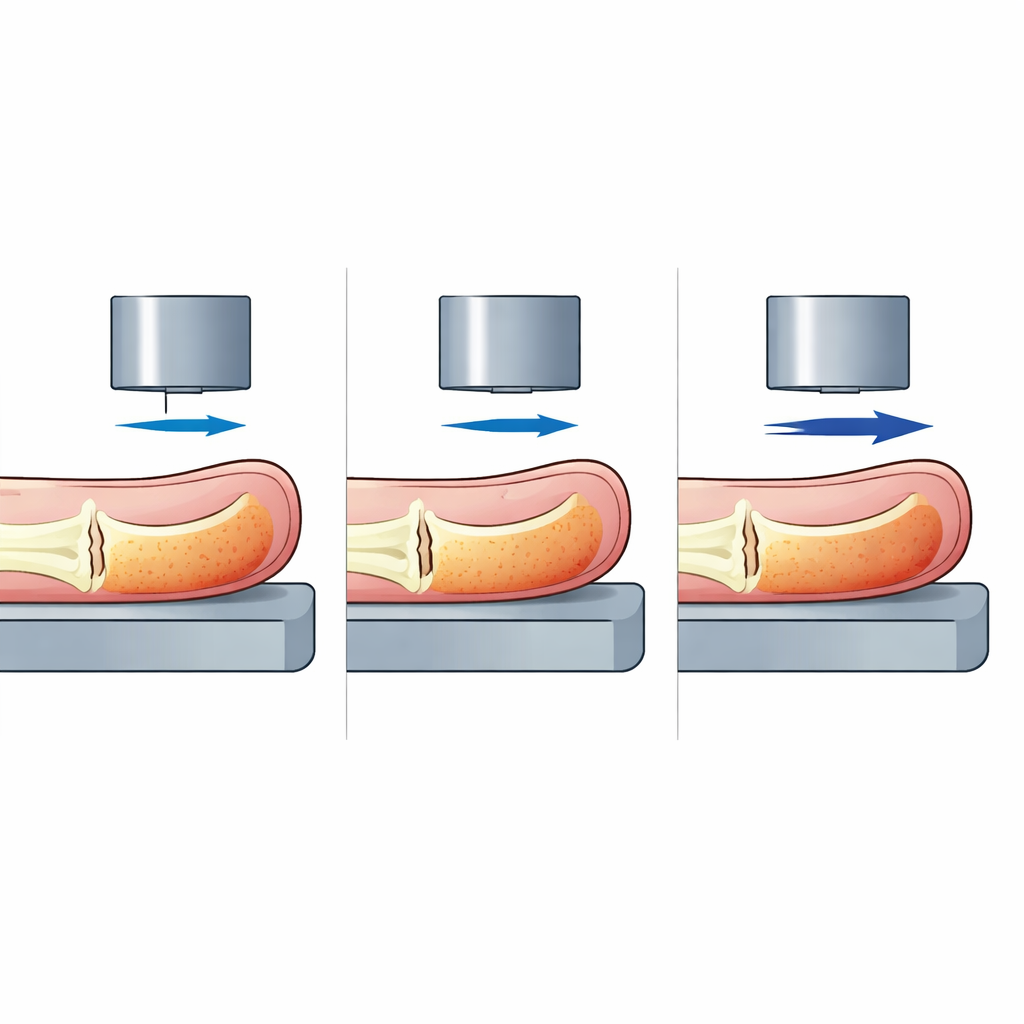
What changes with speed—and what does not
With the model in hand, the authors examined how its parameters varied with impact speed, gender, and age. They found a clear trend: effective stiffness increased as contact velocity rose. In other words, when the robot pressed faster, the same amount of finger compression produced higher forces—consistent with the viscoelastic nature of living tissue. Crucially, this velocity dependence was captured directly in the model’s parameters. By contrast, differences between men and women, and between younger and older participants, were negligible once all the data were analyzed statistically. The team summarized their findings as median and upper-bound (95th percentile) parameter values for each speed, then translated these into displacement–force curves that represent both typical and worst-case conditions.
Turning biomechanical insight into safer machines
To a layperson, the main message is straightforward: how hard a robot "feels" to your finger depends strongly on how fast it moves, and this study provides a clean, quantitative way to capture that effect. The new three-stage model links robot speed to the maximum force that can arise when the forefinger is clamped, supplying conservative upper bounds that can be built directly into safety standards and robot control strategies. Beyond the forefinger, the same approach can be adapted to other body regions, helping engineers design collaborative robots that react quickly enough, and softly enough, to keep everyday contact from turning into injury.
Citation: Liu, J., Akiyama, Y., Fujikawa, T. et al. Towards velocity-dependent nonlinear elasticity of human forefinger soft tissue for specification construction. Sci Rep 16, 13454 (2026). https://doi.org/10.1038/s41598-026-40018-3
Keywords: human-robot interaction, soft tissue mechanics, finger safety, collaborative robots, biomechanical modeling