Clear Sky Science · pt
Rumo à elasticidade não linear dependente da velocidade do tecido mole do dedo indicador humano para construção de especificações
Por que o toque robô–humano na ponta do dedo importa
À medida que robôs saem das gaiolas e começam a trabalhar lado a lado com pessoas, trombadas e beliscões acidentais tornam-se inevitáveis. Nossos dedos, especialmente a região dorsal, costumam ficar mais próximos de ferramentas e peças em movimento, mas as regras de segurança ainda dependem de estimativas grosseiras sobre quanta força eles podem suportar com segurança. Este estudo se concentra em uma questão surpreendentemente simples, de grandes consequências: quando um robô pressiona a parte dorsal do seu dedo indicador em diferentes velocidades, como esse tecido mole realmente reage, e como esse conhecimento pode tornar os robôs mais seguros?
Examinando de perto um ponto vulnerável
Os pesquisadores focaram o lado dorsal do dedo indicador, uma região frequentemente exposta durante tarefas de montagem e manuseio, mas amplamente ignorada nas normas de segurança existentes. Diretrizes internacionais atuais, como a ISO/TS 15066, estabelecem limites para forças e pressões em partes da mão, mas seus modelos subjacentes do tecido mole humano são muito simplificados. Eles ou tratam a pele como uma mola simples ou dependem de fórmulas altamente complexas que são difíceis de traduzir em regras práticas de segurança. A equipe buscou um caminho intermediário: um modelo que capture o comportamento real e não linear do tecido humano, mantendo-se simples o suficiente para ser incorporado diretamente ao projeto de robôs e às especificações de segurança.
Como eles cuidadosamente colidem um robô com um dedo
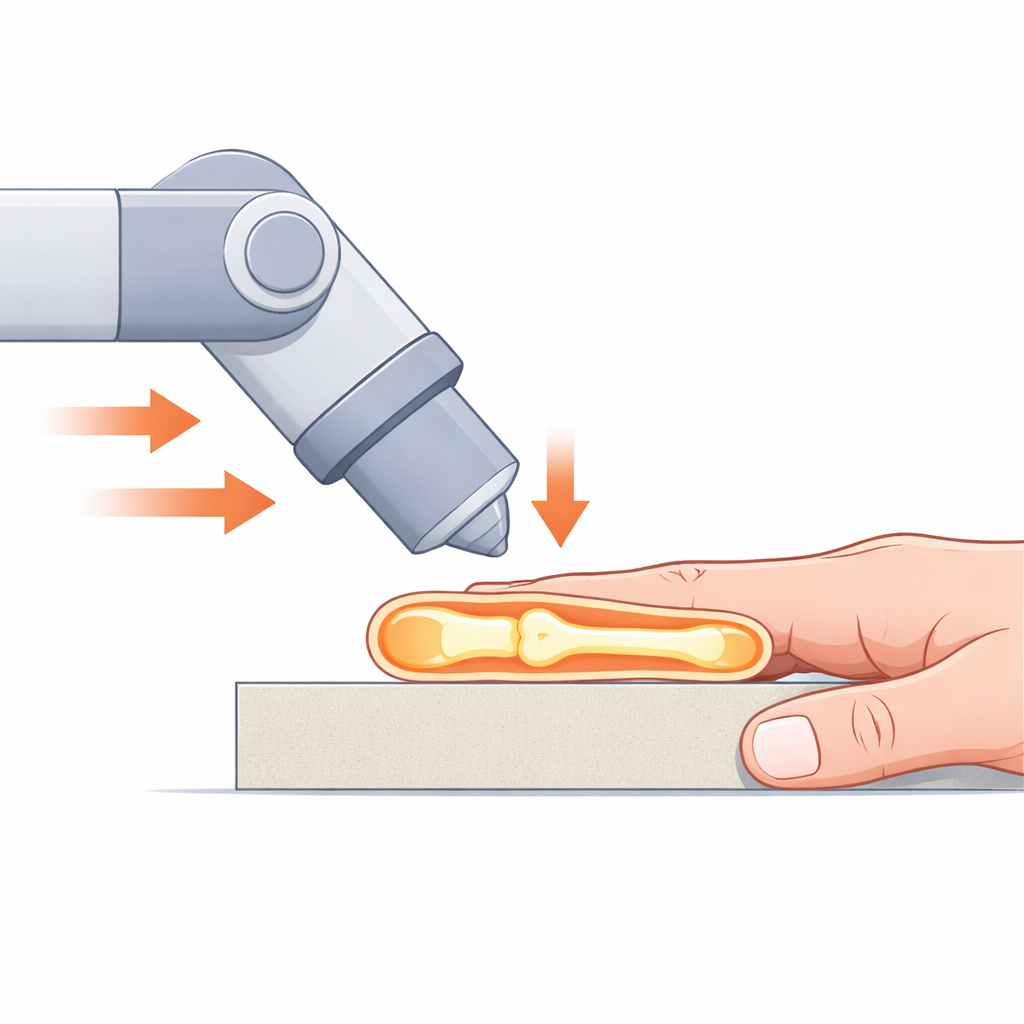
Para estudar isso com segurança, os autores construíram um aparato de teste em que um braço robótico industrial levou um cilindro de metal liso e arredondado diretamente sobre a parte dorsal do dedo indicador de um voluntário. O dedo foi apoiado por baixo, imitando uma situação de apertamento ou pinçamento que pode ser particularmente perigosa. Hardware de proteção garantiu que, se as forças se tornassem muito grandes, o suporte deslizaria e liberaria o dedo. Sensores registraram até onde o impactador se deslocou, quanta força se desenvolveu e exatamente quando o contato começou e terminou. Um total de 117 voluntários, entre 19 e 89 anos, participaram. Para cada pessoa, o robô pressionou em quatro velocidades controladas — de muito lento (quase estático) a relativamente rápido — permitindo à equipe mapear como a força crescia com a compressão do dedo sob diferentes velocidades de contato.
Construindo um modelo de rigidez simples porém realista
A partir desses impactos controlados, a equipe extraiu a relação entre quanto o dedo foi comprimido e a força que reagia. Compararam três descrições matemáticas desse comportamento. Um modelo bi-linear tradicional assume dois níveis de rigidez com linhas retas e um entalhe acentuado entre eles. Um modelo exponencial curva-se suavemente, mas não consegue representar a resposta quase linear e suave observada em pequenas compressões. Os pesquisadores introduziram um novo modelo “de três estágios” que ainda possui regiões de baixa e alta rigidez, mas as conecta com uma transição suave, mais parecida com uma curvatura do que com um canto. Ao ajustar cuidadosamente um parâmetro para evitar sobreajuste, alcançaram excelente concordância com os dados experimentais, mantendo o número de parâmetros pequeno e fisicamente significativo. Isso torna o modelo realista e fácil de incorporar em cálculos de segurança.
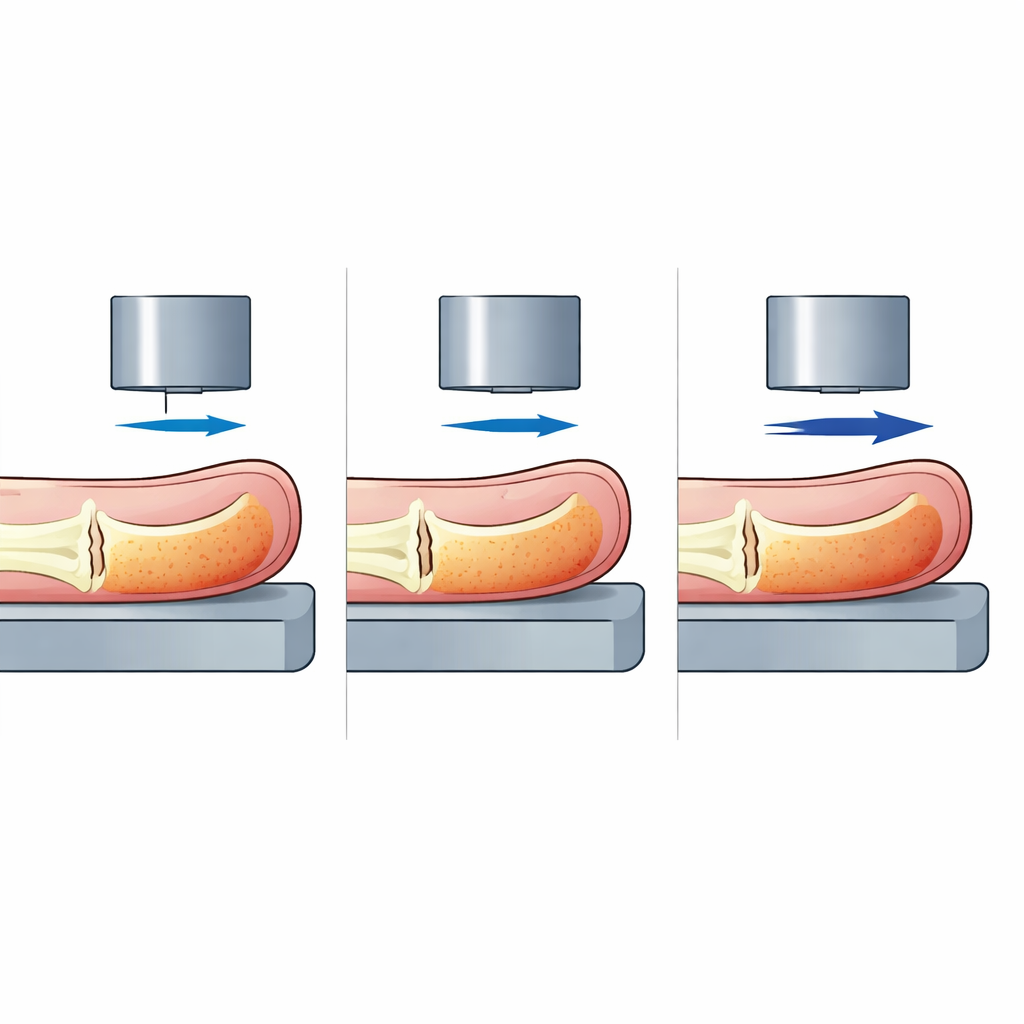
O que muda com a velocidade — e o que não muda
Com o modelo em mãos, os autores examinaram como seus parâmetros variavam com a velocidade de impacto, gênero e idade. Encontraram uma tendência clara: a rigidez efetiva aumentava conforme a velocidade de contato crescia. Em outras palavras, quando o robô pressionava mais rápido, a mesma compressão do dedo gerava forças maiores — consistente com a natureza viscoelástica do tecido vivo. Crucialmente, essa dependência da velocidade foi capturada diretamente nos parâmetros do modelo. Em contraste, diferenças entre homens e mulheres, e entre participantes mais jovens e mais velhos, foram negligenciáveis após análise estatística dos dados. A equipe resumiu suas descobertas como valores medianos e limites superiores (percentil 95) dos parâmetros para cada velocidade, então traduziu esses valores em curvas deslocamento–força que representam condições típicas e de pior caso.
Transformando insights biomecânicos em máquinas mais seguras
Para um leigo, a mensagem principal é simples: o quão “duro” um robô parece ao seu dedo depende fortemente de quão rápido ele se move, e este estudo fornece uma maneira limpa e quantitativa de capturar esse efeito. O novo modelo de três estágios relaciona a velocidade do robô à força máxima que pode surgir quando o dedo indicador é prensado, fornecendo limites superiores conservadores que podem ser incorporados diretamente em normas de segurança e estratégias de controle de robôs. Além do dedo indicador, a mesma abordagem pode ser adaptada a outras regiões do corpo, ajudando engenheiros a projetar robôs colaborativos que reajam rápido o suficiente, e com suavidade suficiente, para evitar que contatos cotidianos se transformem em lesões.
Citação: Liu, J., Akiyama, Y., Fujikawa, T. et al. Towards velocity-dependent nonlinear elasticity of human forefinger soft tissue for specification construction. Sci Rep 16, 13454 (2026). https://doi.org/10.1038/s41598-026-40018-3
Palavras-chave: interação humano-robô, mecânica de tecidos moles, segurança dos dedos, robôs colaborativos, modelagem biomecânica