Clear Sky Science · ar
نحو مرونة غير خطية معتمدة على السرعة لأنسجة الإصبع الأمامي البشرية لبناء المواصفات
لماذا يهم تلامس الروبوت والإنسان على طرف الإصبع
مع خروج الروبوتات من الأقفاص وبدء عملها جنبًا إلى جنب مع البشر، تصبح الصدمات والقرصات العرضية حتمية. غالبًا ما تكون أصابعنا، وبخاصة ظهرها، الأقرب إلى الأدوات والأجزاء المتحركة، ومع ذلك لا تزال قواعد السلامة تعتمد على تقديرات粗粗 عن مدى القوة التي يمكن أن تتحملها بأمان. تركز هذه الدراسة على سؤال بسيط مفاجئ العواقب: عندما يضغط روبوت على ظهر إصبعك بسرعة مختلفة، كيف تدفع تلك الأنسجة الرخوة فعليًا، وكيف يمكن لهذه المعرفة جعل الروبوتات أكثر أمانًا؟
نظرة فاحصة على نقطة معرضة للخطر
ركز الباحثون على الجانب الظهري (الظهر) من الإصبع الأمامي، وهو منطقة تتعرض كثيرًا أثناء مهام التجميع والمناولة لكنها مُهملة إلى حد كبير في معايير السلامة الحالية. توفر الإرشادات الدولية الحالية، مثل ISO/TS 15066، حدودًا للقوى والضغوط على أجزاء اليد، لكن نماذجها الأساسية لأنسجة الإنسان الرخوة تقريبية جدًا. فهي إما تعامل الجلد كبساطة نابضية أو تعتمد على صيغ معقدة للغاية يصعب ترجمتها إلى قواعد سلامة عملية. سعى الفريق إلى بناء حل وسط: نموذج يلتقط السلوك غير الخطي الحقيقي للأنسجة البشرية مع البقاء بسيطًا بما يكفي ليُدمج مباشرة في تصميم الروبوتات ومواصفات السلامة.
كيف يصطدم الروبوت بلطف بإصبع
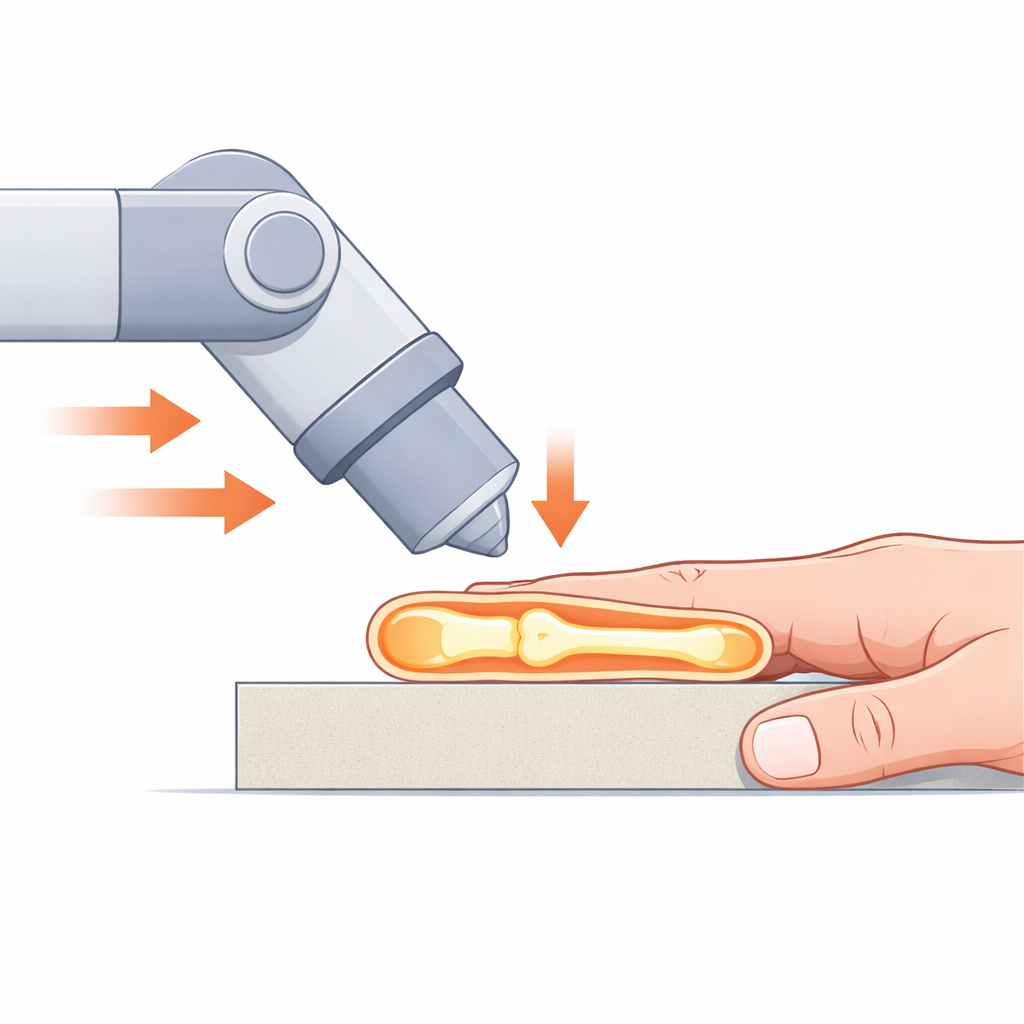
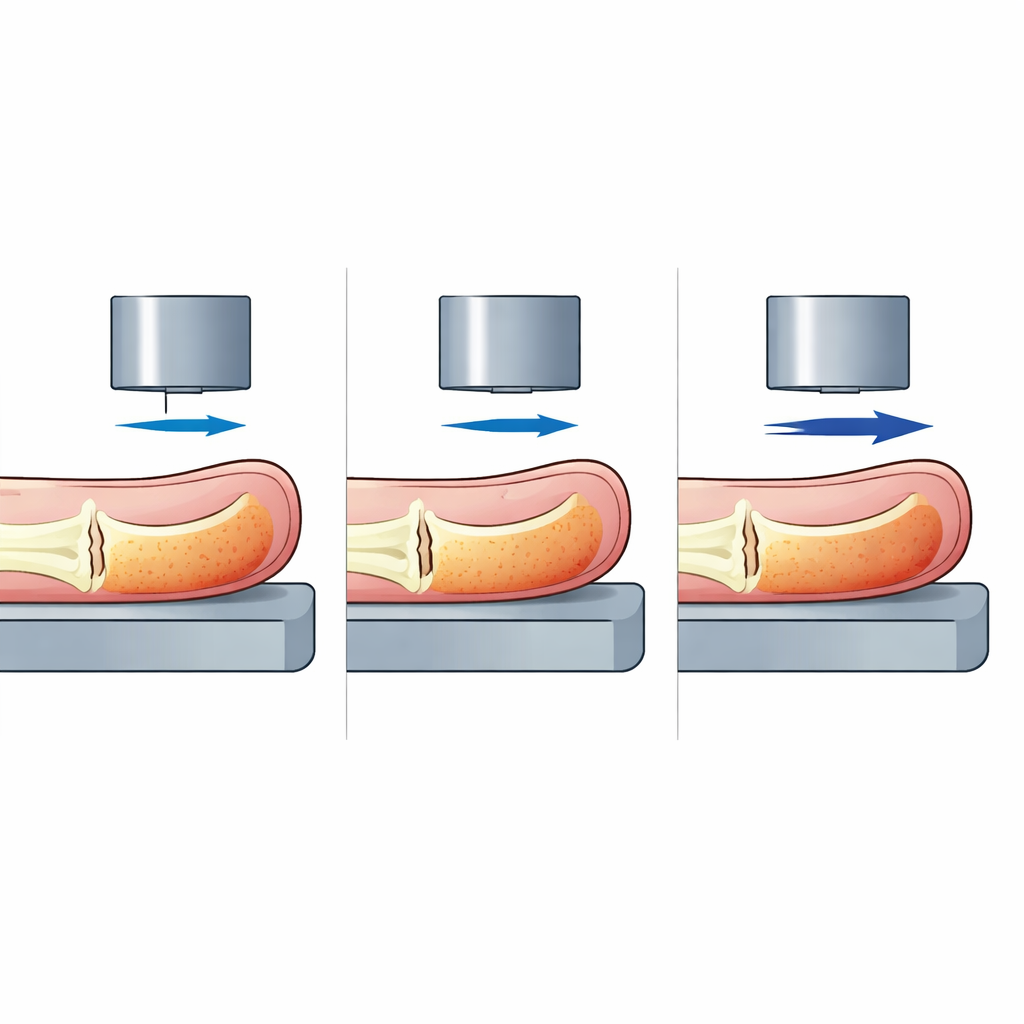
لدراسة ذلك بأمان، بنى المؤلفون تجهيزًا تجريبيًا قام فيه ذراع روبوت صناعي بتحريك أسطوانة معدنية ناعمة ومدورة مباشرة نحو أسفل على ظهر إصبع متطوع. وُضع الإصبع مدعومًا من الأسفل، محاكيًا حالة تشبيهية للقرص أو القبض التي قد تكون خطيرة بشكل خاص. ضمنت معدات حماية أنه إذا ازدادت القوى كثيرًا، فإن الدعامة ستنزلق بعيدًا وتطلق الإصبع. سجّلت المستشعرات مسافة حركة المؤثر، وال força المتكونة، والوقت الدقيق لبدء ونهاية التلامس. شارك إجمالي 117 متطوعًا تتراوح أعمارهم بين 19 و89 عامًا. لكل شخص، ضغط الروبوت بأربعة سرعات مضبوطة—من بطيئة جدًا (قريبة من السكون) إلى سريعة إلى حد ما—مما أتاح للفريق رسم كيفية ازدياد القوة مع انضغاط الإصبع عند سرعات تلامس مختلفة.
بناء نموذج صلابة بسيط لكنه واقعي
من هذه الصدمات المتحكم بها، استخرج الفريق العلاقة بين مقدار انضغاط الإصبع والقوة الراجعة. قارنوا ثلاث أوصاف رياضية لهذا السلوك. يفترض النموذج ثنائي الخط التقليدي مستويي صلابة مستقيمين مع انحناءة حادة بينهما. النموذج الأسي ينحني بسلاسة لكنه يفشل في إظهار الاستجابة شبه المستقيمة واللطيفة التي تُرى عند الانضغاطات الصغيرة. قدم الباحثون نموذجًا جديدًا "ثلاثي المراحل" يحتفظ بمناطق صلابة منخفضة وعالية لكنه يربطهما بانتقال سلس، أشبه بانحناءة ناعمة بدل الزاوية الحادة. عبر ضبط معلمة بعناية لمنع الإفراط في الملاءمة، حققوا توافقًا ممتازًا مع البيانات التجريبية مع الحفاظ على عدد صغير من المعلمات ذات معاني فيزيائية. هذا يجعل النموذج واقعيًا وسهل الإدراج في حسابات السلامة.
ما يتغير مع السرعة — وما لا يتغير
بوجود النموذج، فحص المؤلفون كيف تختلف معلماته مع سرعة التأثير، والجنس، والعمر. وجدوا اتجاهًا واضحًا: زادت الصلابة الفعالة مع ارتفاع سرعة التلامس. بمعنى آخر، عندما ضغط الروبوت أسرع، أنتج نفس مقدار انضغاط الإصبع قوى أعلى—ما يتوافق مع الطابع اللزج المرن للأنسجة الحية. والأهم من ذلك، تم التقاط هذا الاعتماد على السرعة مباشرة في معلمات النموذج. بالمقابل، كانت الاختلافات بين الرجال والنساء، وبين المشاركين الأصغر سنًا والأكبر سنًا، ضئيلة بعد تحليل جميع البيانات إحصائيًا. لخص الفريق نتائجه كقيم وسطية وحدود قصوى (الحد الأعلى عند النسبة المئوية 95) لكل سرعة، ثم حولوا هذه القيم إلى منحنيات إزاحة–قوة تمثل كلًا من الحالات النموذجية والأسوأ.
تحويل البصيرة البيوميكانيكية إلى آلات أكثر أمانًا
بالنسبة لغير المتخصص، الرسالة الرئيسية بسيطة: مدى صلابة إحساس الروبوت عند إصبعك يعتمد بقوة على سرعة حركته، وتوفر هذه الدراسة طريقة كميّة واضحة لالتقاط هذا التأثير. يربط النموذج الثلاثي المراحل الجديد سرعة الروبوت بالحد الأقصى للقوة التي يمكن أن تنشأ عند قرص الإصبع الأمامي، موفرًا حدودًا عُليا محافظة يمكن إدراجها مباشرة في معايير السلامة واستراتيجيات تحكم الروبوت. وبخلاف الإصبع الأمامي، يمكن تكييف نفس النهج لمناطق جسدية أخرى، مما يساعد المهندسين على تصميم روبوتات تعاونية تتفاعل بسرعة كافية وبنعومة كافية لمنع تحول التلامس اليومي إلى إصابة.
الاستشهاد: Liu, J., Akiyama, Y., Fujikawa, T. et al. Towards velocity-dependent nonlinear elasticity of human forefinger soft tissue for specification construction. Sci Rep 16, 13454 (2026). https://doi.org/10.1038/s41598-026-40018-3
الكلمات المفتاحية: تفاعل الإنسان والروبوت, ميكانيكا الأنسجة الرخوة, سلامة الأصابع, الروبوتات التعاونية, النمذجة البيوميكانيكية