Clear Sky Science · sv
Mot hastighetsberoende icke-linjär elasticitet i människans fingertoppens mjukvävnad för specifikationskonstruktion
Varför robot–mänsklig kontakt på en fingertopp spelar roll
När robotar lämnar burar och börjar arbeta sida vid sida med människor blir oavsiktliga stötar och klämningar oundvikliga. Våra fingrar, särskilt ovansidorna, är ofta närmast rörliga verktyg och delar, men säkerhetsregler bygger fortfarande på grova uppskattningar av hur mycket kraft de tål utan skada. Denna studie fokuserar på en förvånansvärt enkel fråga med stora konsekvenser: när en robot trycker på ovansidan av din framfingersfinger i olika hastigheter, hur motstår den mjuka vävnaden egentligen, och hur kan den kunskapen göra robotar säkrare?
Närstudie av en utsatt plats
Forskarna koncentrerade sig på fingertoppens dorsala (övre) sida, ett område som ofta exponeras vid monterings- och hanteringsuppgifter men som till stor del förbises i befintliga säkerhetsstandarder. Nuvarande internationella riktlinjer, såsom ISO/TS 15066, anger gränser för krafter och tryck på delar av handens yta, men deras underliggande modeller för människans mjukvävnad är mycket förenklade. De betraktar antingen huden som en enkel fjäder eller förlitar sig på mycket komplexa formler som är svåra att omsätta i praktiska säkerhetsregler. Teamet satte upp målet att bygga en mellanväg: en modell som fångar vävnadens verkliga, icke-linjära beteende samtidigt som den är tillräckligt enkel för att direkt kunna användas i robotdesign och säkerhetsspecifikationer.
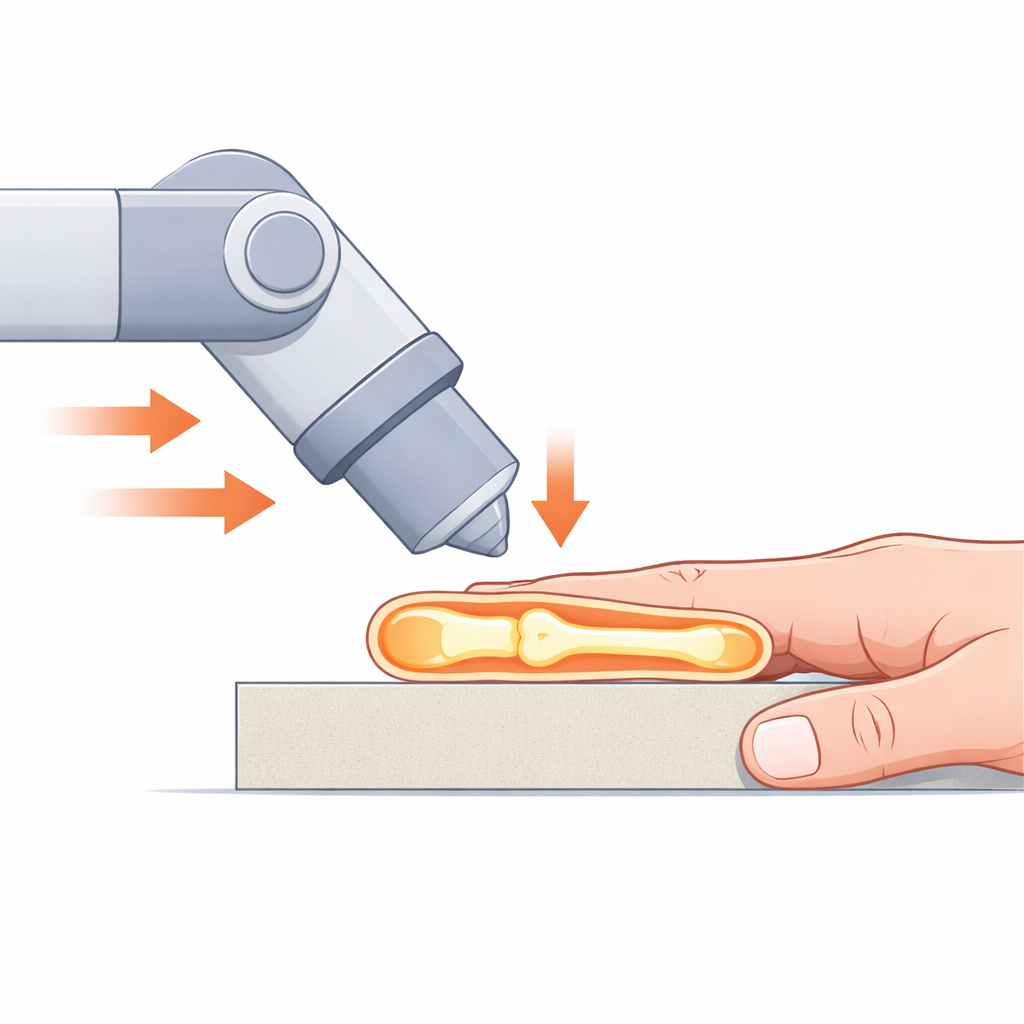
Hur de försiktigt kraschar en robot in i ett finger
För att studera detta på ett säkert sätt byggde författarna en testuppställning där en industrirobotarm drev en slät, rundad metallcylinder rakt nedåt mot ovansidan på en frivillig deltagares framfinger. Fingret var stödd underifrån, vilket efterliknar en kläm- eller nyp-situation som kan vara särskilt farlig. Skyddshårdvara såg till att om krafterna blev för stora skulle stödet glida undan och frigöra fingret. Sensorer registrerade hur långt påverkningsföremålet rörde sig, hur mycket kraft som utvecklades och exakt när kontakt började och slutade. Totalt deltog 117 frivilliga, i åldrarna 19 till 89 år. För varje person tryckte roboten med fyra kontrollerade hastigheter — från mycket långsamt (nästan statiskt) till ganska snabbt — vilket möjliggjorde att kartlägga hur kraften ökade med fingrets kompression vid olika kontaktshastigheter.
Att bygga en enkel men realistisk styvhetsmodell
Från dessa kontrollerade påverkansexperiment utvann teamet förhållandet mellan hur mycket fingret trycktes ihop och den återverkande kraften. De jämförde tre matematiska beskrivningar av detta beteende. En traditionell bi-linjär modell antar två styvhetsnivåer med en skarp knäck mellan dem. En exponentiell modell böjer sig jämnt men fångar inte den nästan linjära, mjuka respons som ses vid små kompressioner. Forskarna introducerade en ny "trestegs"-modell som fortfarande har låga och höga styvhetsområden men förbinder dem med en mjuk övergång — mer som en böj än ett hörn. Genom att noggrant finjustera en parameter för att undvika överanpassning uppnådde de utmärkt överensstämmelse med experimentdata samtidigt som antalet parametrar hölls litet och fysiskt meningsfullt. Det gör modellen både realistisk och enkel att använda i säkerhetsberäkningar.
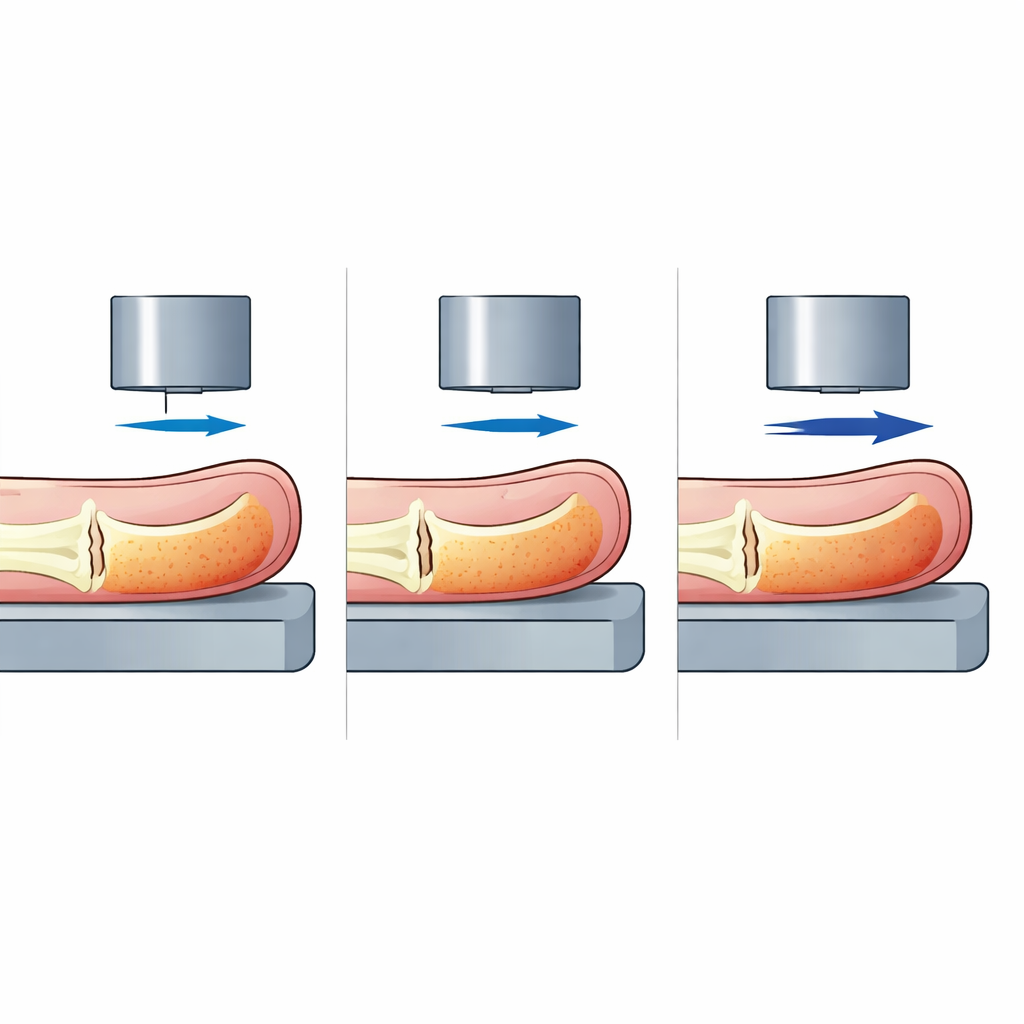
Vad som ändras med hastighet — och vad som inte gör det
Med modellen på plats undersökte författarna hur dess parametrar varierade med påverkningshastighet, kön och ålder. De fann en tydlig trend: den effektiva styvheten ökade när kontakthastigheten steg. Med andra ord, när roboten tryckte snabbare gav samma mängd fingerkompression högre krafter — i linje med den viskoelastiska naturen hos levande vävnad. Avgörande är att detta hastighetsberoende fångades direkt i modellens parametrar. Däremot var skillnader mellan män och kvinnor, samt mellan yngre och äldre deltagare, försumbara när all data analyserades statistiskt. Teamet sammanfattade sina fynd som median- och övre gränsvärden (95:e percentilen) för parametrarna vid varje hastighet, och översatte dessa till förskjutnings–kraft-kurvor som representerar både typiska och värstafallsscenarier.
Att omvandla biomekanisk insikt till säkrare maskiner
För lekmannen är huvudbudskapet enkelt: hur hårt en robot "känns" mot ditt finger beror starkt på hur snabbt den rör sig, och denna studie erbjuder ett tydligt, kvantitativt sätt att fånga den effekten. Den nya trestegsmodellen kopplar robotens hastighet till den maximala kraft som kan uppstå när framfingret kläms, och levererar konservativa övre gränser som kan byggas direkt in i säkerhetsstandarder och robotstyrningsstrategier. Utöver framfingret kan samma angreppssätt anpassas till andra kroppsregioner, vilket hjälper ingenjörer att designa samarbetsrobotar som reagerar tillräckligt snabbt och mjukt för att förhindra att vardaglig kontakt utvecklas till skada.
Citering: Liu, J., Akiyama, Y., Fujikawa, T. et al. Towards velocity-dependent nonlinear elasticity of human forefinger soft tissue for specification construction. Sci Rep 16, 13454 (2026). https://doi.org/10.1038/s41598-026-40018-3
Nyckelord: människa-robot-interaktion, mjukvävnadsmekanik, fingerriktningens säkerhet, samarbetsrobotar, biomekanisk modellering