Clear Sky Science · ru
К движению-зависимой нелинейной упругости мягкой ткани человеческого указательного пальца для разработки спецификаций
Почему прикосновение робота к кончику пальца важно
По мере того как роботы выходят из ограждений и начинают работать рядом с людьми, случайные столкновения и защемления становятся неизбежными. Наши пальцы, особенно их тыльная сторона, часто оказываются ближе всего к движущимся инструментам и деталям, но правила безопасности по‑прежнему опираются на грубые оценки того, какую силу они могут выдержать. В этом исследовании сосредоточились на на первый взгляд простом, но важном вопросе: когда робот нажимает на тыльную сторону вашего указательного пальца с разной скоростью, как на самом деле реагирует мягкая ткань, и как эти данные можно использовать для повышения безопасности роботов?
Внимание к уязвимому месту
Исследователи сосредоточились на тыльной (дорсальной) стороне указательного пальца — области, которая часто оказывается открытой при сборке и работе с деталями, но в значительной степени игнорируется в действующих нормах безопасности. Существующие международные руководства, такие как ISO/TS 15066, задают предельные значения сил и давлений для частей кисти, но их модели мягких тканей человека очень упрощены. Они либо рассматривают кожу как простой пружинный элемент, либо опираются на чрезвычайно сложные формулы, которые трудно применить в практических спецификациях безопасности. Авторы поставили цель найти среднее: модель, фиксирующую реальное нелинейное поведение ткани, но при этом достаточно простую, чтобы напрямую использовать её при проектировании роботов и составлении требований по безопасности.
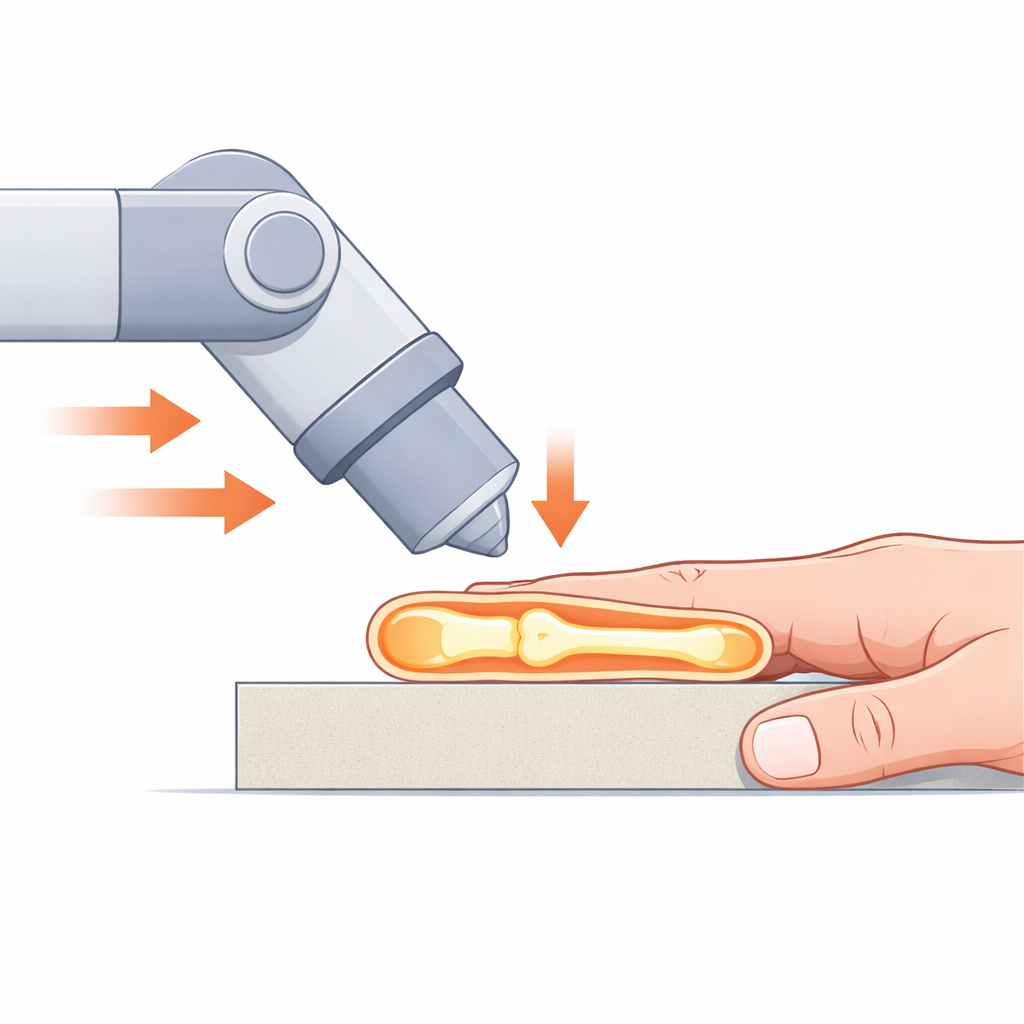
Как они аккуратно «врезают» робот в палец
Чтобы изучить это безопасно, авторы создали испытательную установку, в которой промышленный робот опускал гладкий закруглённый металлический цилиндр вертикально на тыльную сторону указательного пальца добровольца. Палец был поддержан снизу, имитируя прижатие или защемление, которое может быть особенно опасно. Защитное оборудование обеспечивало, что при превышении допустимых сил опора сдвигалась и освобождала палец. Датчики регистрировали перемещение ударника, развивавшуюся силу и точные моменты начала и окончания контакта. В эксперименте участвовали 117 добровольцев в возрасте от 19 до 89 лет. Для каждого человека робот нажимал на палец с четырьмя контролируемыми скоростями — от почти статической до достаточно быстрой — что позволило команде проследить, как меняется сила при сжатии пальца при разных скоростях контакта.
Построение простой, но реалистичной модели жёсткости
Из этих контролируемых ударов команда извлекла зависимость между степенью сжатия пальца и возникающей реактивной силой. Они сравнили три математических описания этого поведения. Традиционная билинейная модель предполагает два уровня жёсткости, соединённые резким изломом. Экспоненциальная модель даёт плавную кривую, но не воспроизводит почти линейную мягкую реакцию при малых сжатиях. Исследователи предложили новую «трёхступенчатую» модель, которая сохраняет области низкой и высокой жёсткости, но соединяет их плавным переходом — скорее как мягкий изгиб, а не острый угол. Аккуратно настроив один параметр во избежание переобучения, они добились отличного согласия с экспериментальными данными при небольшом числе физически осмысленных параметров. Это делает модель одновременно реалистичной и удобной для использования в расчётах безопасности.
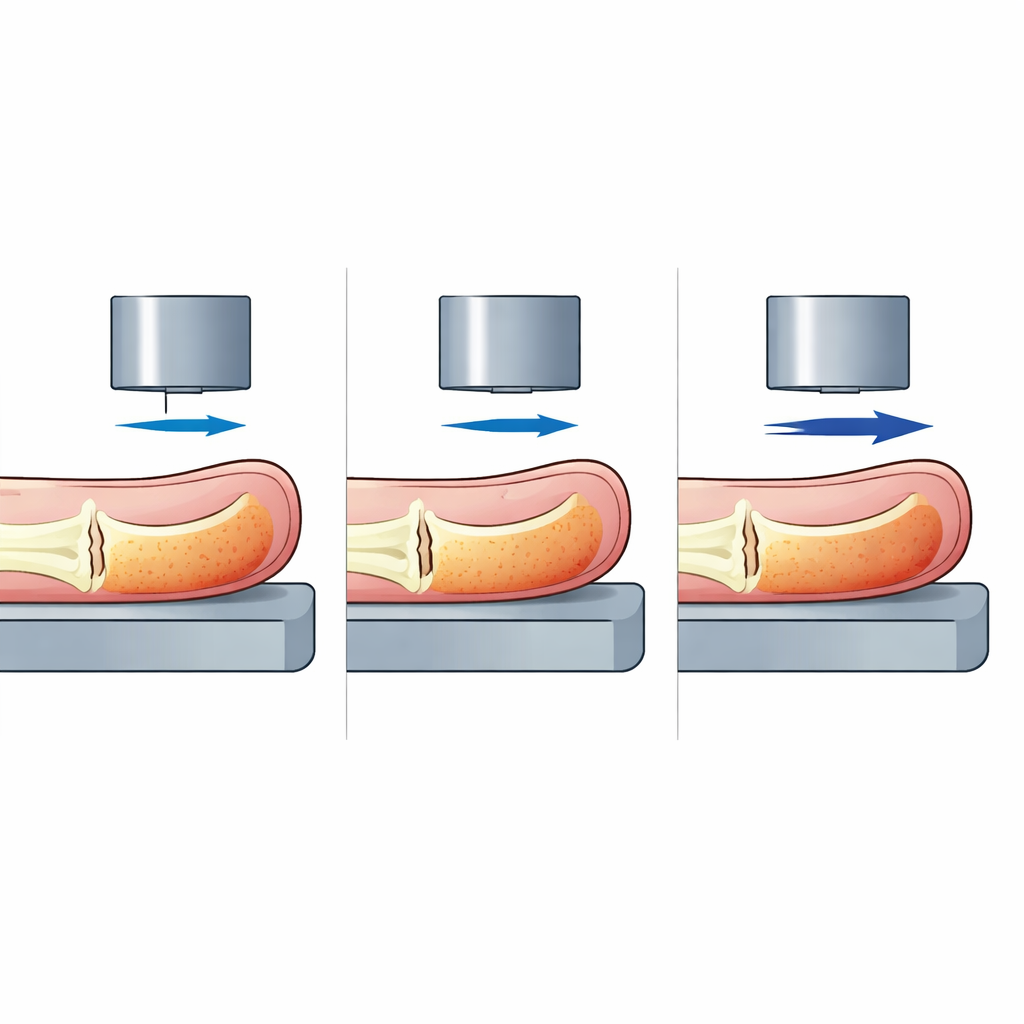
Что меняется с скоростью — и что нет
С имеющейся моделью авторы проанализировали, как её параметры зависят от скорости удара, пола и возраста. Они обнаружили очевидную тенденцию: эффективная жёсткость увеличивается с ростом скорости контакта. Иными словами, при более быстром нажатии то же сжатие пальца вызывает большие силы — что согласуется с вязкоупругой природой живой ткани. Существенно, что эта зависимость от скорости была напрямую отражена в параметрах модели. В то же время различия между мужчинами и женщинами, а также между молодыми и пожилыми участниками оказались незначительными после статистической обработки данных. Команда представила свои результаты в виде медианных и верхних (95‑го процентиля) значений параметров для каждой скорости и затем перевела их в кривые «перемещение–сила», отражающие как типичные, так и худшие сценарии.
Превращение биомеханического понимания в более безопасные машины
Для неспециалиста главный вывод прост: то, насколько «жёстко» робот ощущается вашим пальцем, сильно зависит от его скорости, и это исследование даёт чёткий количественный способ учесть этот эффект. Новая трёхступенчатая модель связывает скорость робота с максимальной силой, которая может возникнуть при защемлении указательного пальца, предоставляя консервативные верхние оценки, которые можно напрямую включить в стандарты безопасности и стратегии управления роботами. За пределами указательного пальца тот же подход можно адаптировать к другим регионам тела, помогая инженерам проектировать совместных роботов, которые реагируют достаточно быстро и достаточно мягко, чтобы обычный контакт не приводил к травмам.
Цитирование: Liu, J., Akiyama, Y., Fujikawa, T. et al. Towards velocity-dependent nonlinear elasticity of human forefinger soft tissue for specification construction. Sci Rep 16, 13454 (2026). https://doi.org/10.1038/s41598-026-40018-3
Ключевые слова: взаимодействие человек‑робот, механика мягких тканей, безопасность пальцев, совместные роботы, биомеханическое моделирование