Clear Sky Science · pl
W kierunku zależnej od prędkości nieliniowej sprężystości miękkich tkanek palca wskazującego człowieka dla konstrukcji specyfikacji
Dlaczego dotyk robota z palcem ma znaczenie
W miarę jak roboty wychodzą z klatek i zaczynają pracować ramię w ramię z ludźmi, przypadkowe zderzenia i przyciśnięcia stają się nieuniknione. Nasze palce, zwłaszcza ich grzbiety, często znajdują się najbliżej poruszających się narzędzi i części, a mimo to reguły bezpieczeństwa nadal opierają się na przybliżonych szacunkach, ile siły mogą bezpiecznie wytrzymać. Badanie to koncentruje się na z pozoru prostym pytaniu o dużych konsekwencjach: gdy robot naciska na grzbiet palca wskazującego przy różnych prędkościach, jak dokładnie tkanka miękka reaguje i jak ta wiedza może uczynić roboty bezpieczniejszymi?
Uważne spojrzenie na wrażliwe miejsce
Naukowcy skupili się na grzbietowej (dorsalnej) stronie palca wskazującego — obszarze często eksponowanym podczas montażu i manipulacji, a w dużej mierze pomijanym w obowiązujących normach bezpieczeństwa. Obecne wytyczne międzynarodowe, takie jak ISO/TS 15066, podają limity sił i ciśnień działających na części dłoni, ale ich modele tkanek miękkich są bardzo uproszczone. Traktują one skórę albo jako prostą sprężynę, albo opierają się na skomplikowanych formułach trudnych do przełożenia na praktyczne zasady bezpieczeństwa. Zespół postawił sobie za cel znalezienie rozwiązania pośredniego: modelu oddającego rzeczywiste, nieliniowe zachowanie tkanek ludzkich, a jednocześnie na tyle prostego, by można go było bezpośrednio wykorzystać w projektowaniu robotów i specyfikacjach bezpieczeństwa.
Jak delikatnie zderzają robota z palcem
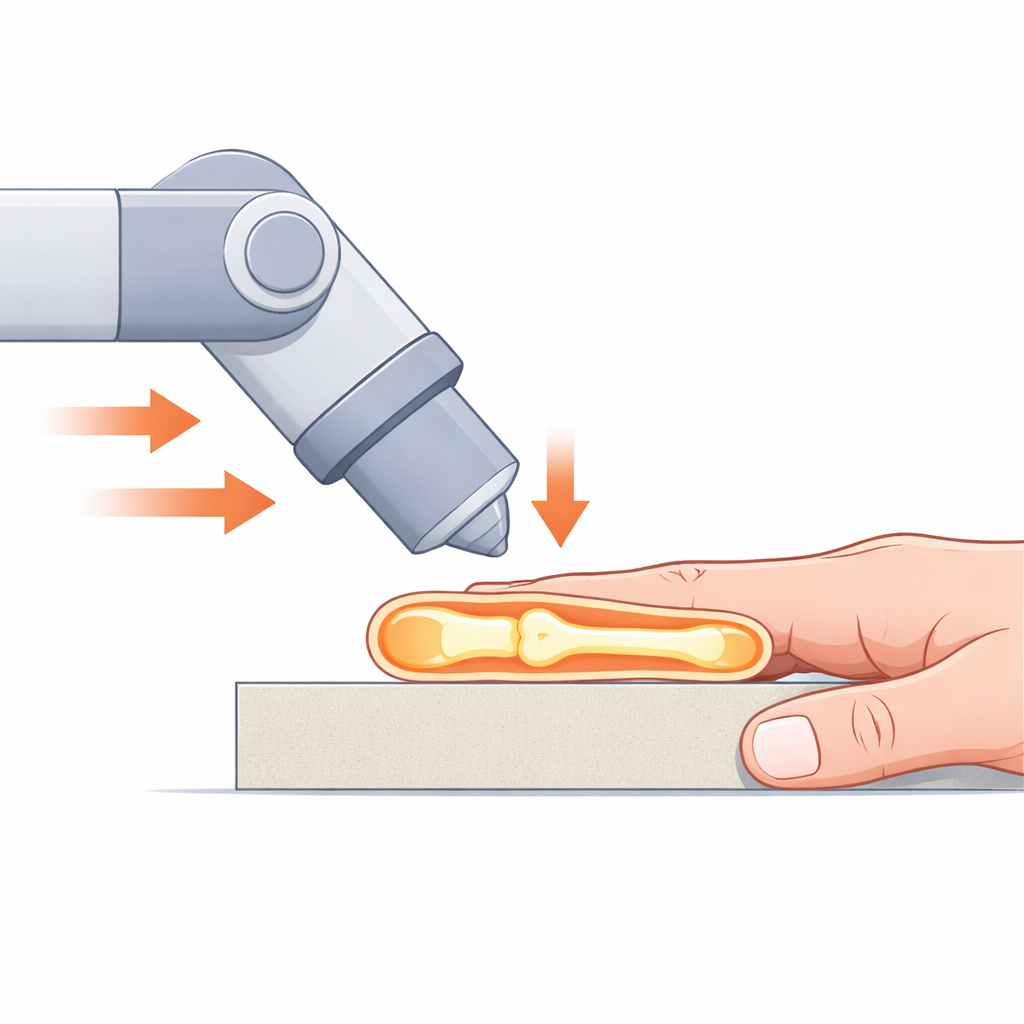
Aby zbadać to bezpiecznie, autorzy zbudowali stanowisko badawcze, w którym ramię przemysłowego robota prowadziło gładki, zaokrąglony metalowy cylinder pionowo na grzbiet palca ochotnika. Palec był podparty od spodu, naśladując sytuację zaciskania lub przytrzaśnięcia, która może być szczególnie niebezpieczna. Zastosowano zabezpieczenia sprzętowe, które w razie wzrostu sił powodowały odsunięcie podpory i uwolnienie palca. Czujniki rejestrowały, jak daleko przemieścił się uderzak, jaką siłę rozwinięto oraz kiedy dokładnie kontakt się rozpoczął i zakończył. W badaniu wzięło udział łącznie 117 ochotników w wieku 19–89 lat. Dla każdej osoby robot naciskał z czterema kontrolowanymi prędkościami — od bardzo wolnych (niemal statycznych) do dość szybkich — co pozwoliło zmapować, jak siła rośnie wraz z odkształceniem palca przy różnych prędkościach kontaktu.
Budowanie prostego, a zarazem realistycznego modelu sztywności
Z tych kontrolowanych uderzeń zespół wyodrębnił zależność między stopniem spłaszczenia palca a siłą odkształcającą. Porównali trzy matematyczne opisy tego zachowania. Tradycyjny model dwuliniowy zakłada dwa poziomy sztywności opisane prostymi odcinkami z ostrym załamaniem między nimi. Model wykładniczy wygina się płynnie, ale nie oddaje niemal liniowej, łagodnej reakcji obserwowanej przy niewielkich odkształceniach. Badacze zaproponowali nowy model „trójstopniowy”, który zachowuje regiony niskiej i wysokiej sztywności, łącząc je jednak gładkim przejściem — bardziej zaokrąglonym niż kątowym. Poprzez ostrożne dostrojenie jednego parametru, by uniknąć nadmiernego dopasowania, uzyskali bardzo dobrą zgodność z danymi eksperymentalnymi przy zachowaniu niewielkiej liczby parametrów o sensownej interpretacji fizycznej. Dzięki temu model jest jednocześnie realistyczny i łatwy do zastosowania w obliczeniach bezpieczeństwa.
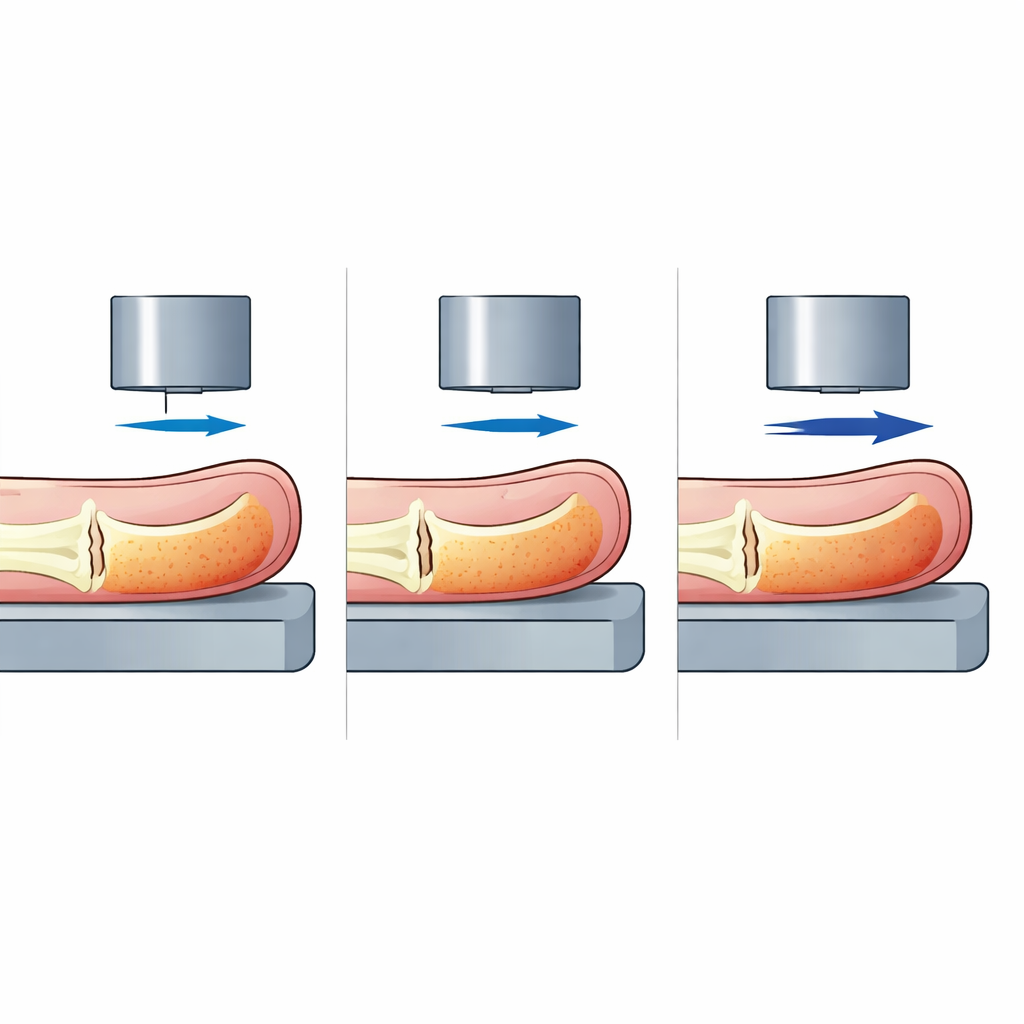
Co zmienia się z prędkością — a co nie
Z modelem w ręku autorzy przeanalizowali, jak jego parametry zmieniają się wraz z prędkością uderzenia, płcią i wiekiem. Odkryli wyraźny trend: efektywna sztywność wzrastała wraz ze wzrostem prędkości kontaktu. Innymi słowy, gdy robot naciskał szybciej, to samo odkształcenie palca generowało większe siły — zgodnie z lepkosprężystą naturą tkanek żywych. Co ważne, zależność od prędkości została uchwycona bezpośrednio przez parametry modelu. Natomiast różnice między mężczyznami i kobietami oraz między młodszymi a starszymi uczestnikami okazały się znikome po przeanalizowaniu danych metodami statystycznymi. Zespół podsumował wyniki, podając wartości mediany i górnego ograniczenia (95. percentyla) parametrów dla każdej prędkości, a następnie przekształcił je w krzywe przemieszczenie–siła reprezentujące warunki typowe i skrajne.
Przekuwanie wiedzy biomechanicznej w bezpieczniejsze maszyny
Dla laika główne przesłanie jest proste: to, jak „mocno” robot odczuwany jest przez twój palec, silnie zależy od jego prędkości ruchu, a to badanie dostarcza klarownego, ilościowego sposobu uchwycenia tego efektu. Nowy model trójstopniowy wiąże prędkość robota z maksymalną siłą, która może powstać przy zaciskaniu palca, dostarczając zachowawczych górnych granic, które można bezpośrednio włączyć do norm bezpieczeństwa i strategii sterowania robotem. Poza palcem wskazującym podejście to można dostosować do innych obszarów ciała, pomagając inżynierom projektować roboty współpracujące, które reagują wystarczająco szybko i dostatecznie delikatnie, aby zwykły kontakt nie doprowadził do urazu.
Cytowanie: Liu, J., Akiyama, Y., Fujikawa, T. et al. Towards velocity-dependent nonlinear elasticity of human forefinger soft tissue for specification construction. Sci Rep 16, 13454 (2026). https://doi.org/10.1038/s41598-026-40018-3
Słowa kluczowe: interakcja człowiek–robot, mechanika tkanek miękkich, bezpieczeństwo palców, roboty współpracujące, modelowanie biomechaniczne