Clear Sky Science · tr
İnsan işaret parmağı yumuşak dokusunun hız-bağımlı doğrusal olmayan elastikiyetine doğru: spesifikasyon oluşturma
Bir robotun insan parmağına dokunmasının önemi
Robotlar kafeslerden çıkarak insanların yanında çalışmaya başladıkça, kazara çarpışmalar ve sıkışmalar kaçınılmaz hale geliyor. Parmaklarımız, özellikle arka kısımları, hareketli aletler ve parçalarla en yakın temas halinde olan bölgeler; yine de güvenlik kuralları onların dayanabileceği kuvvetler hakkında kaba tahminlere dayanıyor. Bu çalışma, sonuçları büyük olan şaşırtıcı derecede basit bir soruya odaklanıyor: bir robot işaret parmağınızın arkasına farklı hızlarda bastığında, o yumuşak doku gerçekte nasıl tepki veriyor ve bu bilgi robotları nasıl daha güvenli kılabilir?
Hassas bir bölgeyi yakından incelemek
Araştırmacılar, montaj ve elle tutma görevleri sırasında sıkça açığa çıkan fakat mevcut güvenlik standartlarında büyük ölçüde göz ardı edilen işaret parmağının dorsal (arka) tarafına odaklandı. Mevcut uluslararası yönergeler, örneğin ISO/TS 15066, elin bazı kısımlarına uygulanan kuvvet ve basınçlar için sınırlar sunuyor, ancak bunların dayandığı insan yumuşak doku modelleri oldukça kaba. Ya deriyi basit bir yay gibi ele alıyorlar ya da pratik güvenlik kurallarına çevrilmesi zor karmaşık formüllere dayanıyorlar. Ekip, insan dokusunun gerçek, doğrusal olmayan davranışını yakalayan ancak robot tasarımına ve güvenlik spesifikasyonlarına doğrudan beslenebilecek kadar basit bir ara çözüm oluşturmayı amaçladı.
Bir robotu parmağa nazikçe çarptıkları düzenek
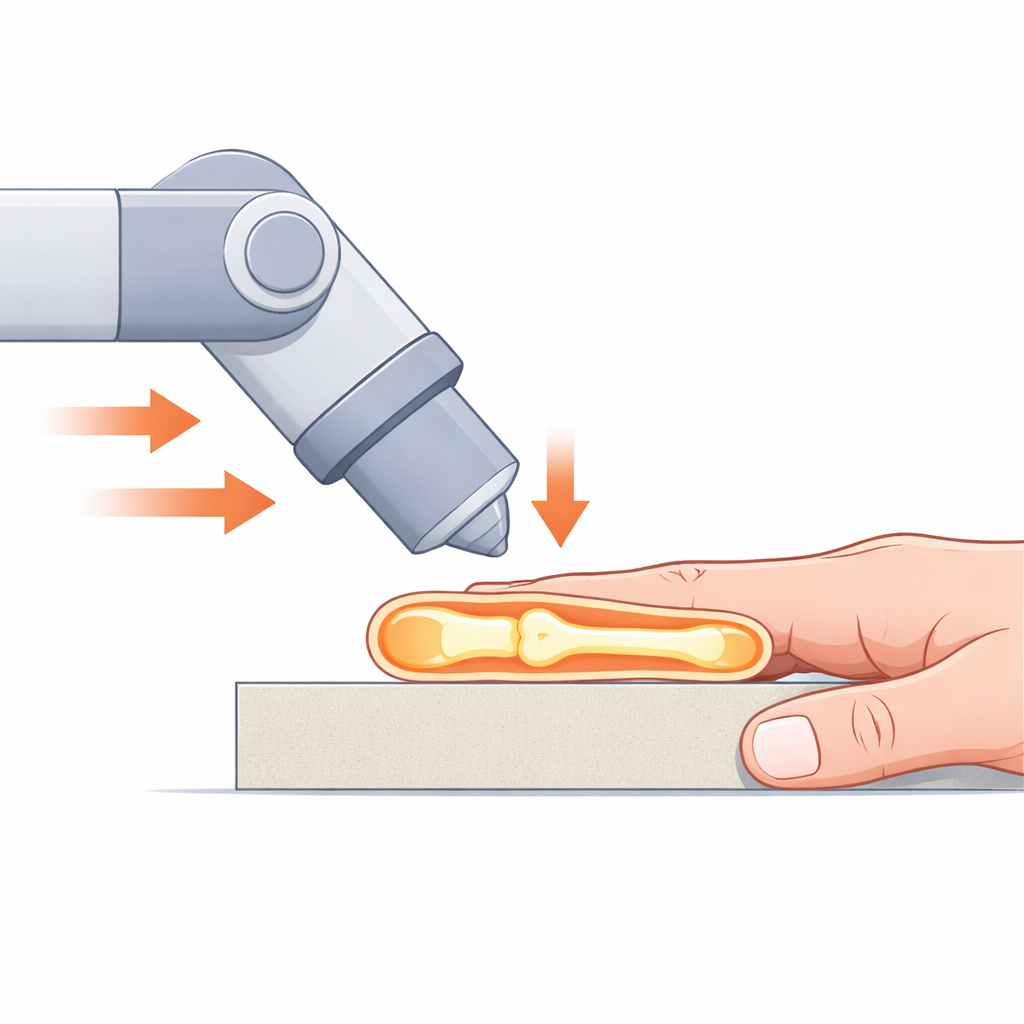
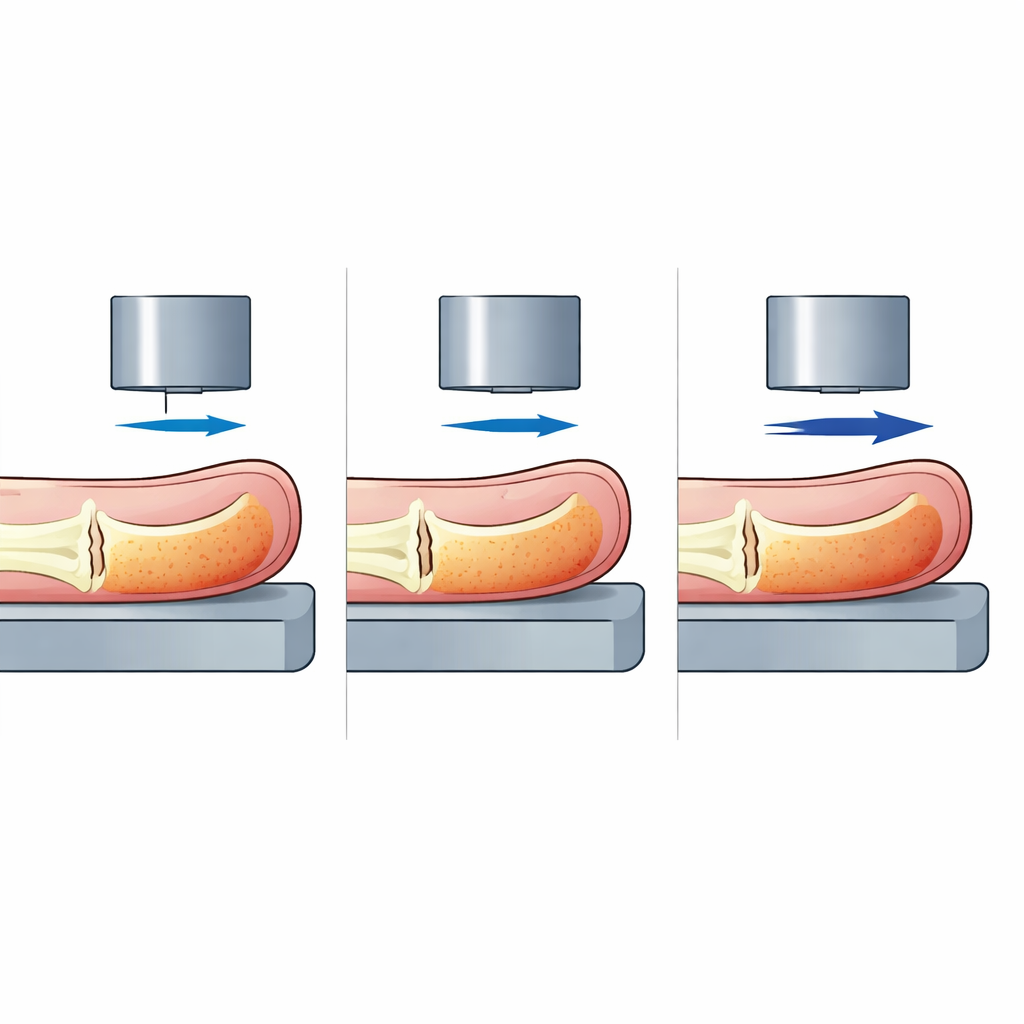
Bunu güvenli biçimde incelemek için yazarlar, endüstriyel bir robot kolunun düz, yuvarlatılmış metal bir silindiri gönüllünün işaret parmağının arka tarafına doğru aşağı doğru ittiği bir test düzeneği kurdular. Parmağın altı desteklenerek sıkıştırma veya sıkışma durumunu taklit etti; bu tür durumlar özellikle tehlikeli olabiliyor. Koruyucu donanım, kuvvetler çok büyük olursa desteğin kayarak parmağı serbest bırakmasını sağlayacak şekilde tasarlandı. Sensörler, darbenin hareket mesafesini, gelişen kuvveti ve temasın tam olarak ne zaman başlayıp bittiğini kaydetti. 19 ila 89 yaşları arasında toplam 117 gönüllü katıldı. Her kişi için robot, çok yavaş (neredeyse statik) olandan oldukça hızlı olana kadar dört kontrollü hızda bastı; bu, ekip tarafından farklı temas hızlarında parmak sıkışmasının kuvvete nasıl dönüştüğünün haritalanmasını sağladı.
Basit ama gerçekçi bir sertlik modeli kurmak
Bu kontrollü darbelerden, ekip parmağın ne kadar sıkıştırıldığı ile geri iten kuvvet arasındaki ilişkiyi çıkardı. Bu davranışın üç matematiksel tanımını karşılaştırdılar. Geleneksel bir iki doğrusal (bi-linear) model, aralarında keskin bir bükülme olan iki düz çizgi sertlik seviyesini varsayar. Üstel bir model düzgünce eğrilenir ancak küçük sıkışmalarda görülen neredeyse düz, nazik tepkiyi gösteremez. Araştırmacılar, düşük ve yüksek sertlik bölgeleri olan ancak bunları köşe yerine yumuşak bir geçişle bağlayan yeni bir "üç aşamalı" model önerdiler. Aşırı uyumu (overfitting) önlemek için bir parametreyi dikkatle ayarlayarak, parametre sayısını az ve fiziksel olarak anlamlı tutarken deneysel verilerle mükemmele yakın uyum sağladılar. Bu, modeli hem gerçekçi hem de güvenlik hesaplamalarına kolayca entegre edilebilir kılıyor.
Hızla değişenler—ve değişmeyenler
Model hazır olduğunda, yazarlar parametrelerin etki hızı, cinsiyet ve yaşla nasıl değiştiğini incelediler. Açık bir eğilim buldular: etkin sertlik, temas hızı arttıkça yükseldi. Başka bir deyişle, robot daha hızlı bastığında aynı miktardaki parmak sıkışması daha yüksek kuvvetler üretti—bu, canlı dokunun viskoelastik doğasıyla tutarlı. Kritik olarak, bu hız bağımlılığı modelin parametrelerine doğrudan yansıtıldı. Oysa erkek ve kadınlar ile genç ve yaşlı katılımcılar arasındaki farklar, tüm veriler istatistiksel olarak analiz edildiğinde önemsiz çıktı. Ekip, her hız için medyan ve üst sınır (yüzde 95) parametre değerlerini özetledi ve bunları tipik ve en kötü durum koşullarını temsil eden yer değiştirme–kuvvet eğrilerine dönüştürdü.
Biyomekanik bilgiyi daha güvenli makinelere dönüştürmek
Bir uzmanın olmayan kişiler için ana mesaj açık: bir robotun parmağınıza ne kadar sert "hissettiği" büyük ölçüde hareket hızına bağlıdır ve bu çalışma bu etkiyi yakalamanın temiz, nicel bir yolunu sunuyor. Yeni üç aşamalı model, robot hızını işaret parmağı sıkıştırıldığında ortaya çıkabilecek maksimum kuvvete bağlıyor ve güvenlik standartlarına ve robot kontrol stratejilerine doğrudan yerleştirilebilecek muhafazakar üst sınırlar sağlıyor. İşaret parmağının ötesinde, aynı yaklaşım diğer vücut bölgelerine uyarlanabilir; bu da mühendislerin, günlük temasların yaralanmaya dönüşmesini engelleyecek kadar hızlı ve yeterince yumuşak tepki veren işbirlikçi robotlar tasarlamasına yardımcı olur.
Atıf: Liu, J., Akiyama, Y., Fujikawa, T. et al. Towards velocity-dependent nonlinear elasticity of human forefinger soft tissue for specification construction. Sci Rep 16, 13454 (2026). https://doi.org/10.1038/s41598-026-40018-3
Anahtar kelimeler: insan-robot etkileşimi, yumuşak doku mekaniği, parmak güvenliği, işbirlikçi robotlar, biyomekanik modelleme