Clear Sky Science · nl
Richting snelheid-afhankelijke niet-lineaire elasticiteit van het zachte weefsel van de menselijke middenvinger voor specificatieopbouw
Waarom aanraking tussen robot en mens op een vingertop ertoe doet
Nu robots uit kooien komen en zij aan zij met mensen gaan werken, zijn accidentele botsingen en knelpunten onvermijdelijk. Onze vingers, vooral de rugzijde, bevinden zich vaak het dichtst bij bewegende gereedschappen en onderdelen, maar veiligheidsregels berusten nog steeds op grove schattingen van hoeveel kracht ze veilig kunnen verdragen. Deze studie spitst zich toe op een verrassend eenvoudige vraag met grote gevolgen: wanneer een robot op de rug van je middenvinger drukt bij verschillende snelheden, hoe reageert dat zachte weefsel daadwerkelijk en hoe kan die kennis robots veiliger maken?
Een nauwkeurige blik op een kwetsbare plek
De onderzoekers richtten zich op de dorsale (rug)zijde van de middenvinger, een regio die vaak wordt blootgesteld tijdens montage- en hanteertaken maar grotendeels wordt genegeerd in bestaande veiligheidsnormen. Huidige internationale richtlijnen, zoals ISO/TS 15066, geven limieten voor krachten en drukken op delen van de hand, maar hun onderliggende modellen van menselijk zacht weefsel zijn zeer ruw. Ze behandelen de huid ofwel als een eenvoudige veer of ze vertrouwen op zeer ingewikkelde formules die moeilijk te vertalen zijn naar praktische veiligheidsregels. Het team wilde een middenweg bouwen: een model dat het echte, niet-lineaire gedrag van menselijk weefsel vastlegt en tegelijk eenvoudig genoeg is om direct in robotontwerp en veiligheidspecificaties te worden gebruikt.
Hoe ze een robot zachtjes tegen een vinger laten botsen
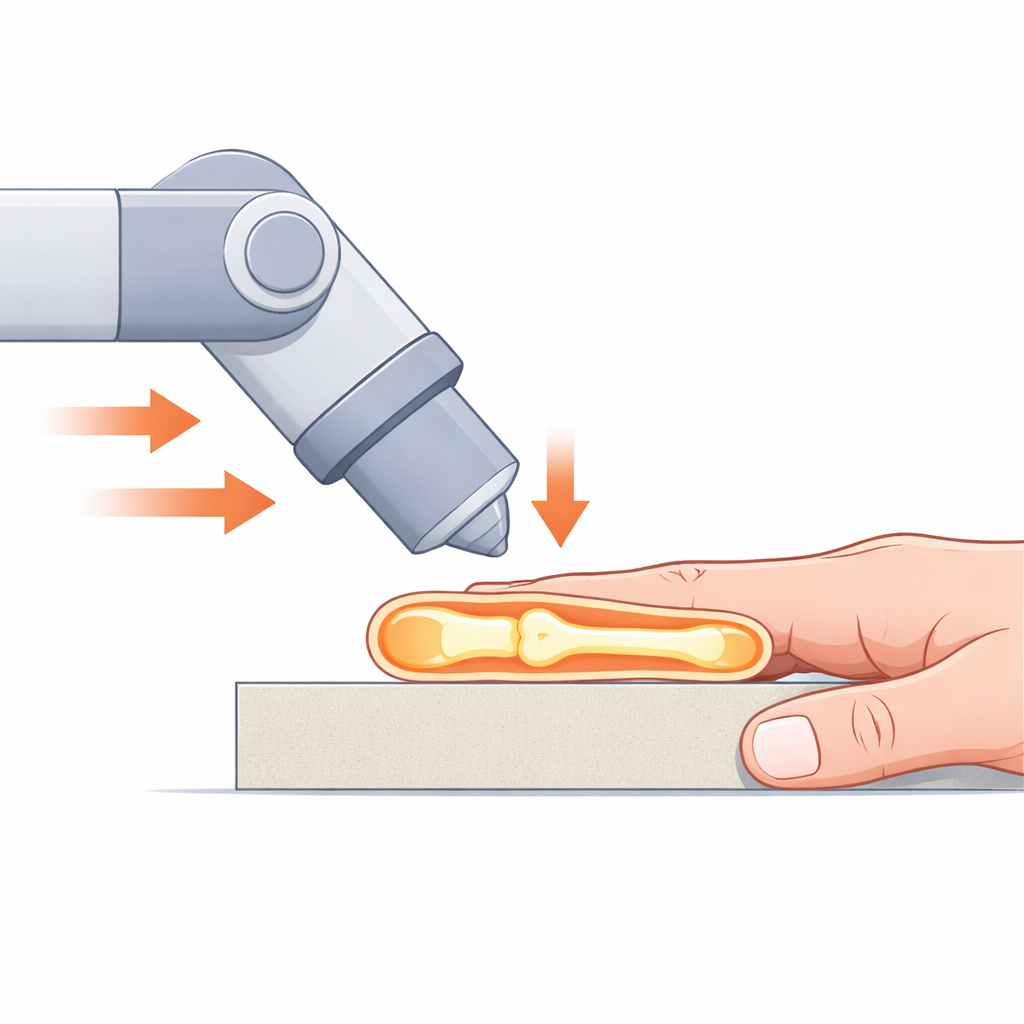
Om dit veilig te bestuderen bouwden de auteurs een testopstelling waarin een industriële robotarm een glad, afgerond metalen cilinder recht naar beneden liet bewegen op de rug van een vrijwilliger’s middenvinger. De vinger werd van onderen ondersteund, wat een klem- of knelsituatie nabootst die bijzonder gevaarlijk kan zijn. Beschermende hardware zorgde ervoor dat, als de krachten te groot werden, de ondersteuning weg zou schuiven en de vinger zou loslaten. Sensors registreerden hoe ver de impactor bewoog, hoeveel kracht zich ontwikkelde en precies wanneer contact begon en eindigde. In totaal namen 117 vrijwilligers, in de leeftijd van 19 tot 89 jaar, deel. Voor elke persoon drukte de robot met vier gecontroleerde snelheden—van zeer langzaam (bijna statisch) tot tamelijk snel—zodat het team kon uittekenen hoe de kracht toenam met vingercompressie bij verschillende contactsnelheden.
Het bouwen van een eenvoudig maar realistisch stijfheidsmodel
Uit deze gecontroleerde impacten haalde het team de relatie tussen hoeveel de vinger werd ingedrukt en de terugduwende kracht. Ze vergeleken drie wiskundige beschrijvingen van dit gedrag. Een traditioneel bi-lineair model veronderstelt twee rechte-lijn stijfheidsniveaus met een scherpe knik ertussen. Een exponentieel model buigt vloeiend maar laat niet de bijna rechte, zachte respons zien die bij kleine compressies wordt waargenomen. De onderzoekers introduceerden een nieuw "drie-fasen" model dat nog steeds lage- en hoge-stijfheidsgebieden heeft maar deze met een soepele overgang verbindt, meer een zachte buiging dan een hoek. Door zorgvuldig één parameter af te stemmen om overfitting te voorkomen, bereikten ze uitstekende overeenstemming met de experimentele data terwijl het aantal parameters klein en fysisch zinvol bleef. Dit maakt het model zowel realistisch als eenvoudig in te zetten in veiligheidsberekeningen.
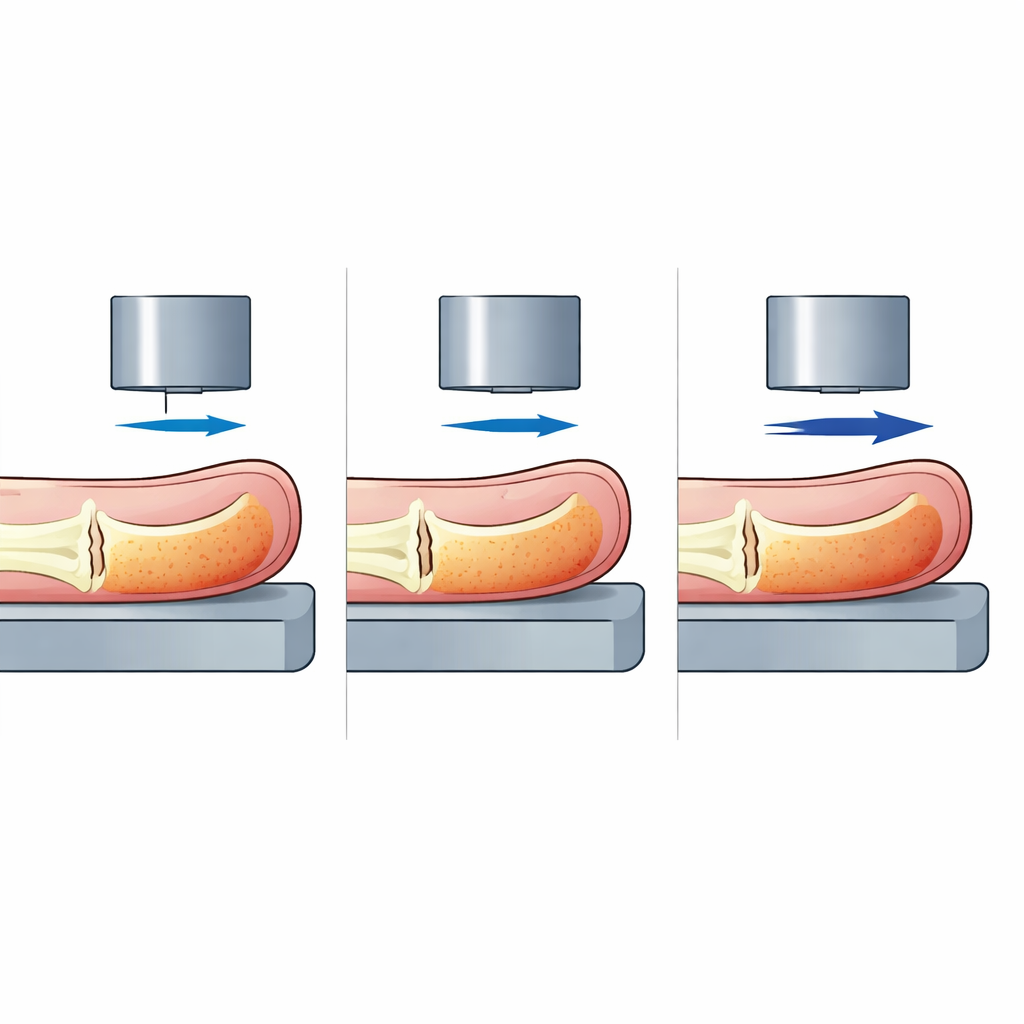
Wat verandert met snelheid — en wat niet
Met het model in handen onderzochten de auteurs hoe de parameters varieerden met impactsnelheid, geslacht en leeftijd. Ze vonden een duidelijke trend: de effectieve stijfheid nam toe naarmate de contactsnelheid steeg. Met andere woorden, wanneer de robot sneller drukte, veroorzaakte dezelfde hoeveelheid vingercompressie hogere krachten—consistent met de visco-elastische aard van levend weefsel. Cruciaal is dat deze snelheidsafhankelijkheid direct in de parameters van het model werd vastgelegd. Daarentegen bleken verschillen tussen mannen en vrouwen, en tussen jongere en oudere deelnemers, verwaarloosbaar zodra alle data statistisch waren geanalyseerd. Het team vatete hun bevindingen samen als mediaan- en bovengrenswaarden (95e percentiel) voor de parameters bij elke snelheid en vertaalde deze naar verplaatsing–krachtcurven die zowel typische als worst-case condities representeren.
Biomechanisch inzicht omzetten in veiligere machines
Voor de leek is de kernboodschap eenvoudig: hoe hard een robot "voelt" voor je vinger hangt sterk af van hoe snel hij beweegt, en deze studie levert een heldere, kwantitatieve manier om dat effect vast te leggen. Het nieuwe drie-fasen model koppelt robotsnelheid aan de maximale kracht die kan ontstaan wanneer de middenvinger wordt geklemd en levert conservatieve bovengrenzen die direct in veiligheidsnormen en robotbesturingsstrategieën kunnen worden ingebouwd. Buiten de middenvinger kan dezelfde benadering worden aangepast aan andere lichaamsregio’s, waardoor ingenieurs collaboratieve robots kunnen ontwerpen die snel genoeg en zacht genoeg reageren om alledaand contact te voorkomen dat in letsel verandert.
Bronvermelding: Liu, J., Akiyama, Y., Fujikawa, T. et al. Towards velocity-dependent nonlinear elasticity of human forefinger soft tissue for specification construction. Sci Rep 16, 13454 (2026). https://doi.org/10.1038/s41598-026-40018-3
Trefwoorden: mens-robot interactie, mechanica van zacht weefsel, vingerveiligheid, collaboratieve robots, biomechanische modellering