Clear Sky Science · de
Zur geschwindigkeitsabhängigen, nichtlinearen Elastizität des Weichgewebes der menschlichen Fingerbeere zur Spezifikationsentwicklung
Warum Robotermanipulation an einer Fingerspitze wichtig ist
Wenn Roboter aus Schutzkäfigen herauskommen und Seite an Seite mit Menschen arbeiten, sind versehentliche Stöße und Quetschungen unausweichlich. Unsere Finger, insbesondere deren Rückseiten, liegen oft am nächsten an beweglichen Werkzeugen und Bauteilen, doch Sicherheitsregeln beruhen noch immer auf groben Annahmen darüber, welche Kräfte sie aushalten können. Diese Studie konzentriert sich auf eine überraschend einfache Frage mit großer Bedeutung: Wenn ein Roboter mit unterschiedlicher Geschwindigkeit auf die Rückseite Ihres Zeigefingers drückt, wie wehrt das Weichgewebe tatsächlich dagegen, und wie kann dieses Wissen Roboter sicherer machen?
Einen verletzlichen Bereich genau betrachten
Die Forschenden fokussierten die dorsale (hintere) Seite des Zeigefingers — eine Region, die bei Montage- und Handhabungsaufgaben oft exponiert ist, in bestehenden Sicherheitsstandards aber weitgehend unberücksichtigt bleibt. Aktuelle internationale Richtlinien, etwa ISO/TS 15066, geben Grenzwerte für Kräfte und Drücke an Teilen der Hand vor, doch die zugrundeliegenden Modelle für menschliches Weichgewebe sind sehr grob. Entweder wird die Haut als einfacher Federmechanismus behandelt oder es werden hochkomplexe Formeln verwendet, die sich schwer in praktische Sicherheitsregeln übertragen lassen. Das Team setzte sich zum Ziel, einen Mittelweg zu finden: ein Modell, das das reale, nichtlineare Verhalten des Gewebes erfasst und zugleich einfach genug bleibt, um direkt in Roboterentwurf und Sicherheitsvorgaben einfließen zu können.
Wie sie einen Roboter schonend gegen einen Finger prallen lassen
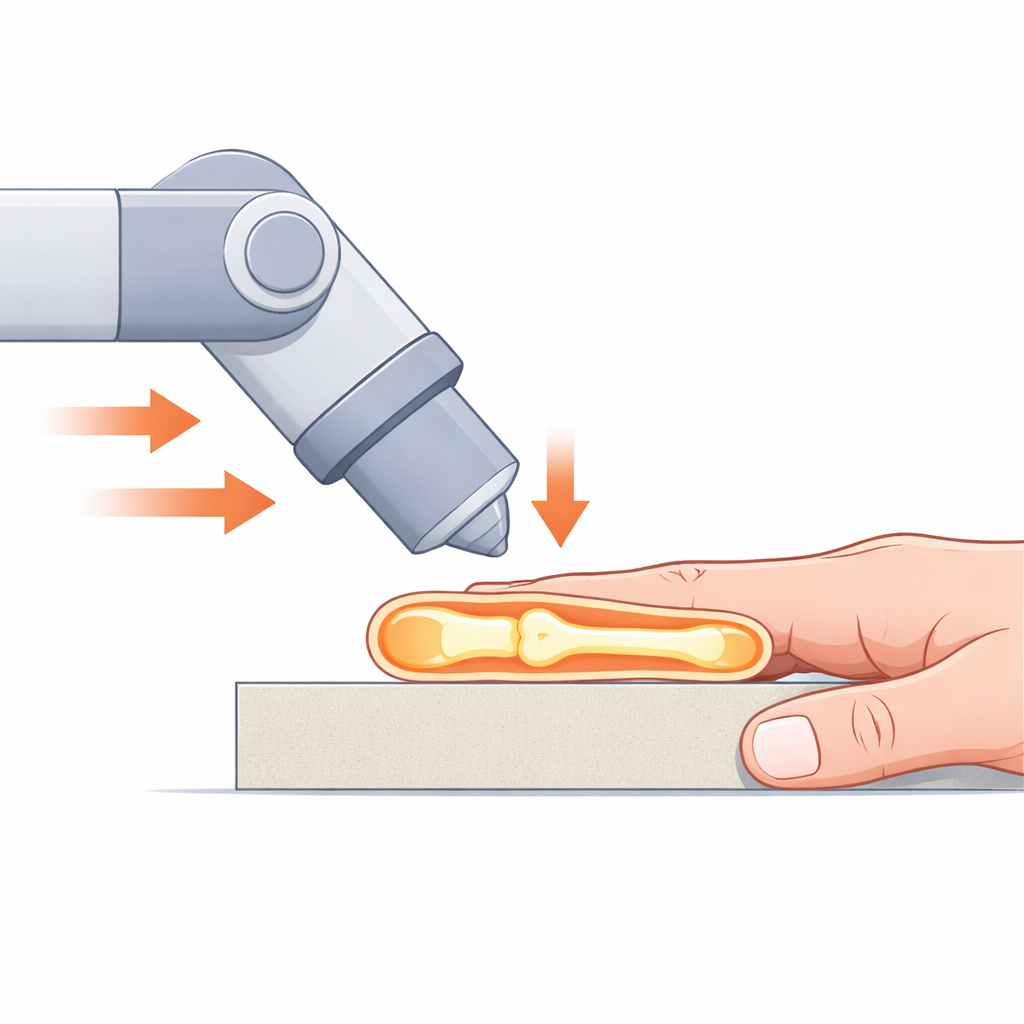
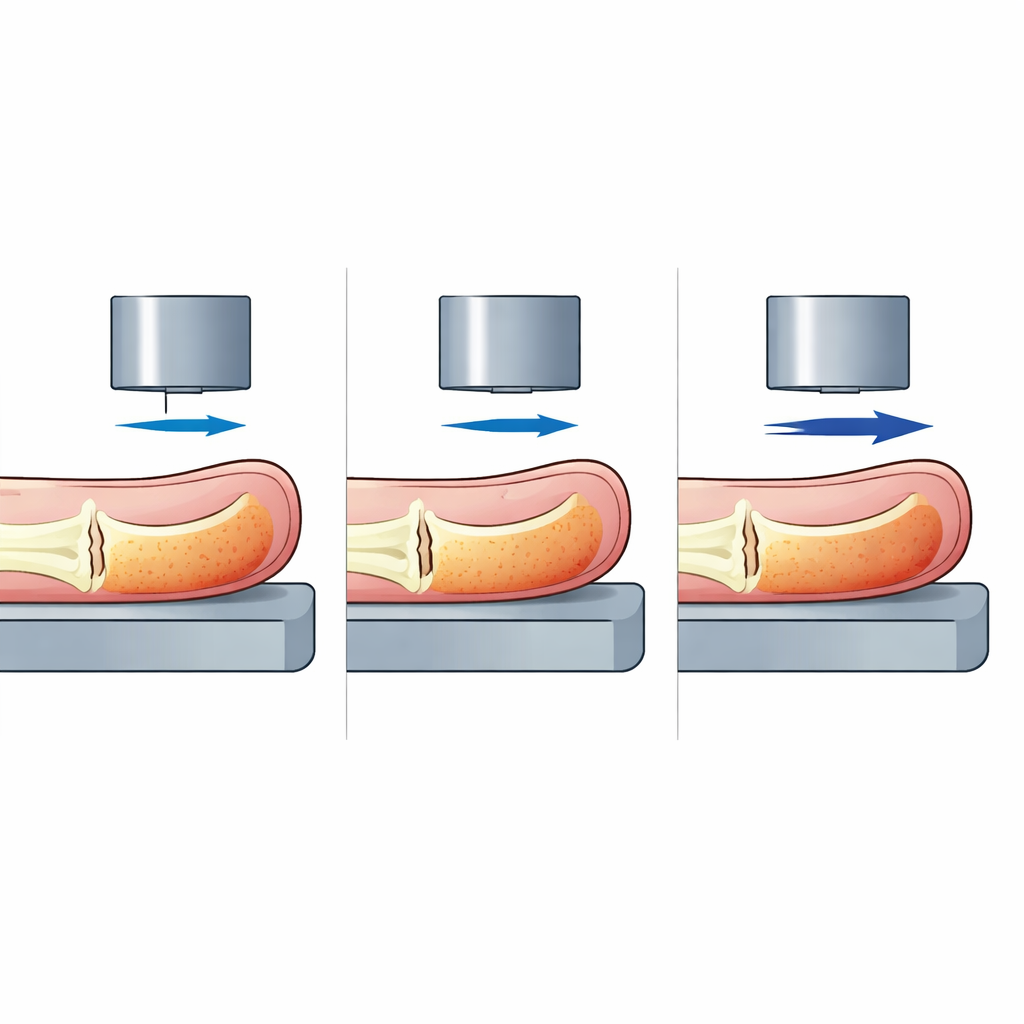
Um dies sicher zu untersuchen, bauten die Autorinnen und Autoren eine Versuchsanordnung, bei der ein Industrieroboter einen glatten, abgerundeten Metallzylinder senkrecht auf die Rückseite eines freiwilligen Probandenfingers fuhr. Der Finger wurde von unten gestützt, was eine Klemm- oder Quetschsituation nachbildet, die besonders gefährlich sein kann. Schutzmechanik sorgte dafür, dass bei zu hohen Kräften die Stütze weggleitet und den Finger freigibt. Sensoren zeichneten auf, wie weit der Eindringkörper sich bewegte, welche Kräfte entstanden und wann der Kontakt begann und endete. Insgesamt nahmen 117 Freiwillige im Alter von 19 bis 89 Jahren teil. Für jede Person drückte der Roboter mit vier kontrollierten Geschwindigkeiten — von sehr langsam (nahezu statisch) bis relativ schnell — sodass das Team nachvollziehen konnte, wie die Kraft mit der Fingerkompression bei unterschiedlichen Kontaktgeschwindigkeiten anstieg.
Aufbau eines einfachen, aber realistischen Steifigkeitsmodells
Aus diesen kontrollierten Aufprallen extrahierte das Team die Beziehung zwischen der Quetschung des Fingers und der zurückwirkenden Kraft. Sie verglichen drei mathematische Beschreibungen dieses Verhaltens. Ein traditionelles bi-lineares Modell nimmt zwei lineare Steifigkeitsbereiche mit einem scharfen Knick an. Ein exponentielles Modell verläuft glatt gekrümmt, zeigt jedoch nicht die nahezu lineare, sanfte Reaktion bei kleinen Kompressionen. Die Forschenden führten ein neues „dreistufiges“ Modell ein, das weiterhin niedrig- und hochsteife Bereiche besitzt, diese jedoch mit einem glatten Übergang verbindet — eher eine weiche Biegung als eine Ecke. Durch gezieltes Abstimmen eines Parameters, um Überanpassung zu vermeiden, erzielten sie eine hervorragende Übereinstimmung mit den experimentellen Daten und hielten gleichzeitig die Anzahl der Parameter klein und physikalisch interpretierbar. Das macht das Modell realistisch und leicht in Sicherheitsberechnungen einsetzbar.
Was sich mit der Geschwindigkeit ändert — und was nicht
Mit dem Modell in der Hand untersuchten die Autoren, wie sich dessen Parameter mit Aufprallgeschwindigkeit, Geschlecht und Alter veränderten. Sie fanden einen klaren Trend: Die effektive Steifigkeit nahm mit steigender Kontaktgeschwindigkeit zu. Anders gesagt: Wenn der Roboter schneller drückte, erzeugte dieselbe Fingerkompression höhere Kräfte — konsistent mit der viskoelastischen Natur lebenden Gewebes. Entscheidenderweise wurde diese Geschwindigkeitsabhängigkeit direkt in den Modellparametern abgebildet. Demgegenüber waren Unterschiede zwischen Männern und Frauen sowie zwischen jüngeren und älteren Teilnehmenden, nach statistischer Auswertung aller Daten, vernachlässigbar. Das Team fasste die Ergebnisse als Median- und Obergrenzwerte (95. Perzentil) der Parameter für jede Geschwindigkeit zusammen und übersetzte diese in Verschiebungs–Kraft-Kurven, die typische und Worst-Case-Bedingungen repräsentieren.
Biomechanische Erkenntnisse in sicherere Maschinen überführen
Für Laien ist die Kernaussage klar: Wie hart sich ein Roboter an Ihrem Finger „anfühlt“, hängt stark von seiner Geschwindigkeit ab, und diese Studie liefert eine saubere, quantitative Methode, diesen Effekt zu erfassen. Das neue dreistufige Modell verknüpft Roboterbewegung mit der maximal entstehenden Kraft beim Einklemmen des Zeigefingers und liefert konservative Obergrenzen, die direkt in Sicherheitsstandards und Roboterregelungen einfließen können. Über den Zeigfinger hinaus lässt sich derselbe Ansatz auf andere Körperregionen übertragen und hilft Ingenieurinnen und Ingenieuren, kollaborative Roboter so zu entwerfen, dass sie schnell genug und zugleich weich genug reagieren, damit alltäglicher Kontakt nicht zu Verletzungen führt.
Zitation: Liu, J., Akiyama, Y., Fujikawa, T. et al. Towards velocity-dependent nonlinear elasticity of human forefinger soft tissue for specification construction. Sci Rep 16, 13454 (2026). https://doi.org/10.1038/s41598-026-40018-3
Schlüsselwörter: Mensch-Roboter-Interaktion, Mechanik von Weichgewebe, Fingersicherheit, kollaborative Roboter, biomechanische Modellierung