Clear Sky Science · fr
Vers une élasticité non linéaire dépendante de la vitesse du tissu mou du doigt humain pour la construction de spécifications
Pourquoi le contact robot–humain au niveau d’une pulpe de doigt importe
À mesure que les robots sortent des cages et commencent à travailler côte à côte avec des personnes, les heurts et pincements accidentels deviennent inévitables. Nos doigts, en particulier leur face dorsale, sont souvent les parties les plus proches des outils et pièces en mouvement, pourtant les règles de sécurité reposent encore sur des estimations grossières de la force qu’ils peuvent supporter en toute sécurité. Cette étude se concentre sur une question étonnamment simple mais aux grandes conséquences : lorsqu’un robot appuie sur le dos de votre doigt à des vitesses différentes, comment ce tissu mou réagit-il exactement, et comment cette connaissance peut-elle rendre les robots plus sûrs ?
Examiner de près un point vulnérable
Les chercheurs se sont focalisés sur la face dorsale du doigt (côté dos), une zone fréquemment exposée lors de tâches d’assemblage et de manutention mais largement négligée par les normes de sécurité existantes. Les directives internationales actuelles, comme l’ISO/TS 15066, fixent des limites de forces et de pressions pour des parties de la main, mais leurs modèles sous-jacents du tissu mou humain restent très approximatifs. Ils considèrent soit la peau comme un simple ressort, soit font appel à des formules très complexes difficiles à traduire en règles pratiques de sécurité. L’équipe a cherché une voie médiane : un modèle qui capture le comportement non linéaire réel des tissus humains tout en restant assez simple pour être intégré directement dans la conception des robots et les spécifications de sécurité.
Comment ils font entrer un robot en collision douce avec un doigt
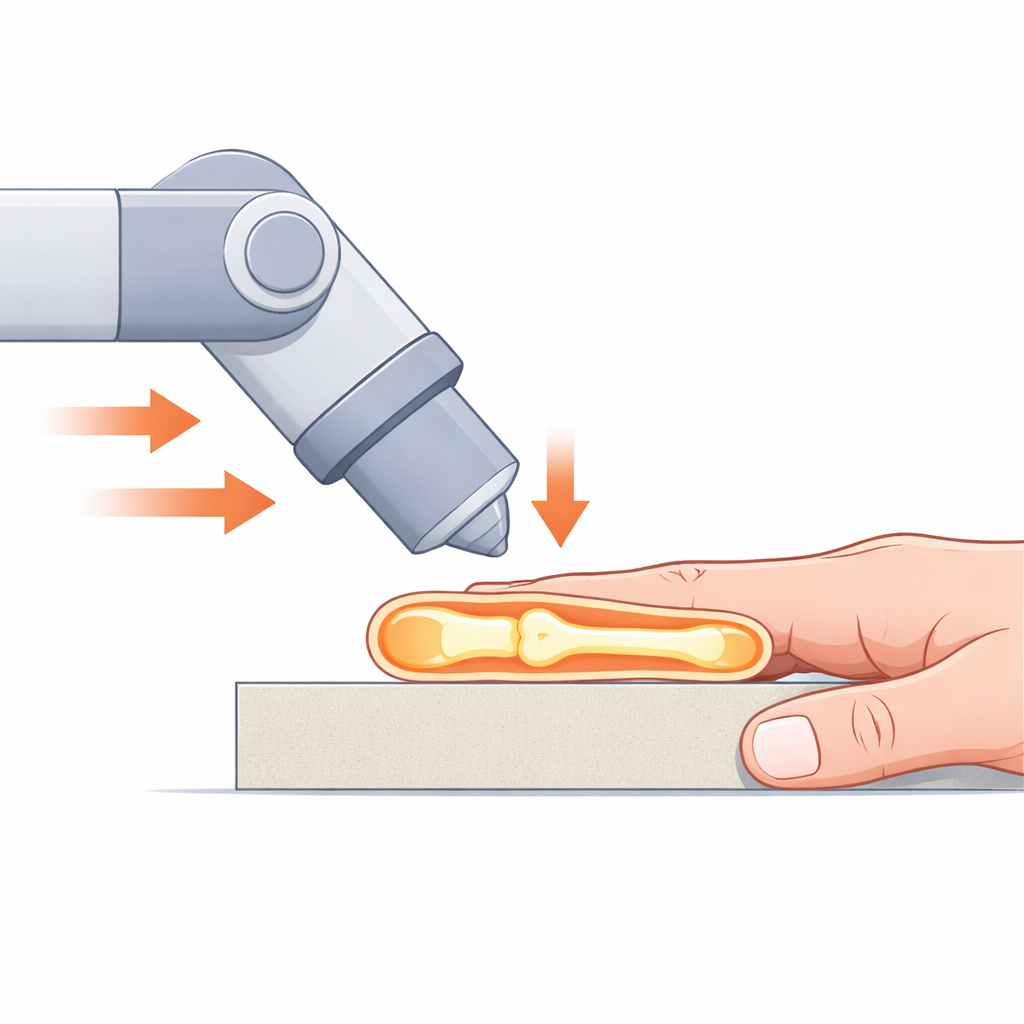
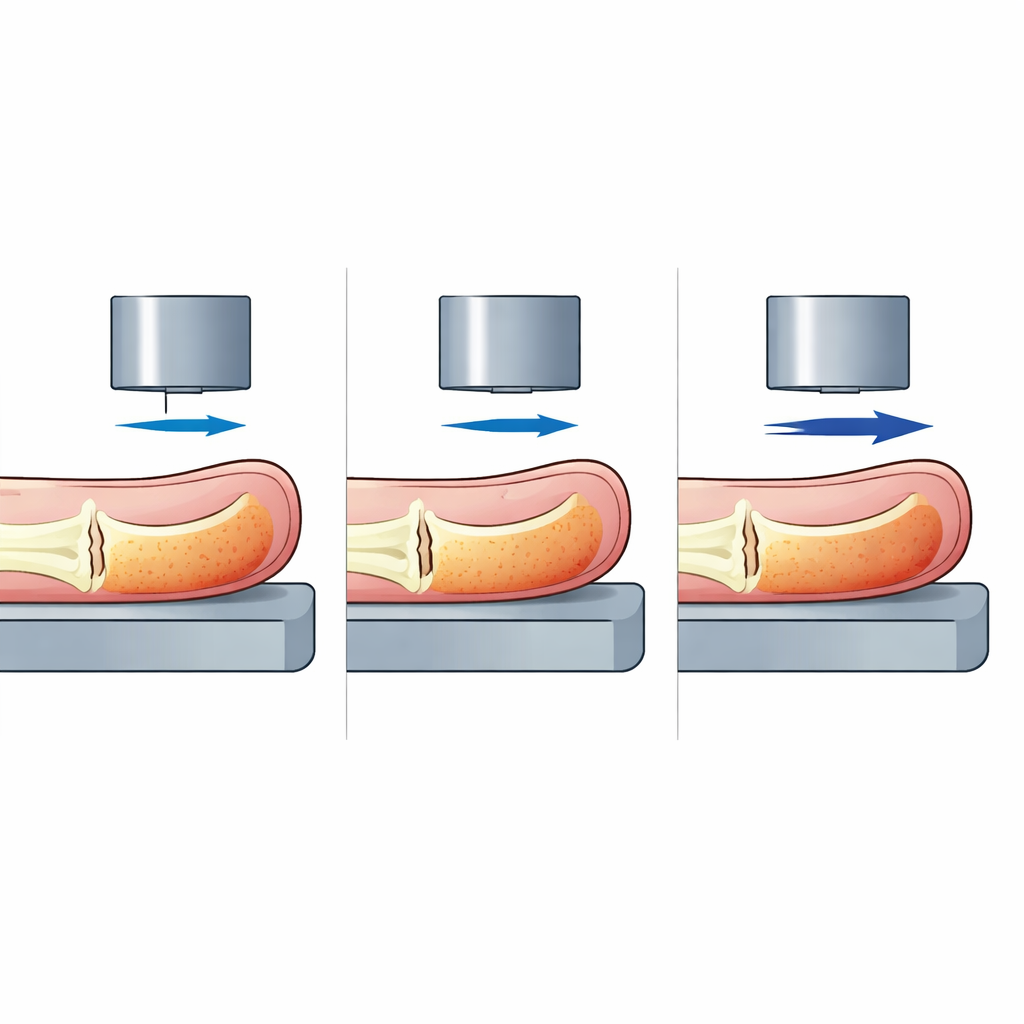
Pour étudier cela en toute sécurité, les auteurs ont construit un dispositif d’essai dans lequel un bras robotique industriel poussait un cylindre métallique lisse et arrondi perpendiculairement vers le dos du doigt d’un volontaire. Le doigt était soutenu par en dessous, mimant une situation de serrage ou de pincement qui peut être particulièrement dangereuse. Du matériel de protection garantissait que, si les forces devenaient trop importantes, le support glisserait et libérerait le doigt. Des capteurs ont enregistré la course de l’impacteur, l’évolution de la force et les instants précis de contact et de séparation. Au total, 117 volontaires âgés de 19 à 89 ans ont participé. Pour chaque personne, le robot a appuyé à quatre vitesses contrôlées — de très lente (presque statique) à assez rapide — permettant à l’équipe de cartographier comment la force augmentait avec la compression du doigt selon différentes vitesses de contact.
Construire un modèle de raideur simple mais réaliste
À partir de ces impacts contrôlés, l’équipe a extrait la relation entre l’amplitude de compression du doigt et la force de réaction. Ils ont comparé trois descriptions mathématiques de ce comportement. Un modèle bilinéaire traditionnel suppose deux niveaux de raideur représentés par des droites raccordées par un angle net. Un modèle exponentiel courbe la réponse de façon lisse mais n’arrive pas à reproduire la réponse presque droite et douce observée pour de faibles compressions. Les chercheurs ont introduit un nouveau modèle « en trois étapes » qui conserve des régions de faible et de forte raideur mais les relie par une transition lisse, plus proche d’une flexion douce que d’un angle. En ajustant soigneusement un paramètre pour éviter le surajustement, ils ont obtenu une excellente concordance avec les données expérimentales tout en limitant le nombre de paramètres à des valeurs simples et physiquement interprétables. Cela rend le modèle à la fois réaliste et facile à intégrer dans des calculs de sécurité.
Ce qui change avec la vitesse — et ce qui ne change pas
Avec le modèle en main, les auteurs ont examiné comment ses paramètres variaient avec la vitesse d’impact, le genre et l’âge. Ils ont observé une tendance claire : la raideur effective augmente lorsque la vitesse de contact augmente. Autrement dit, quand le robot appuie plus rapidement, une même compression du doigt génère des forces plus élevées — cohérent avec la nature viscoélastique des tissus vivants. De manière cruciale, cette dépendance à la vitesse est intégrée directement dans les paramètres du modèle. En revanche, les différences entre hommes et femmes, ainsi qu’entre participants plus jeunes et plus âgés, se sont révélées négligeables une fois l’ensemble des données analysées statistiquement. L’équipe a résumé ses résultats par des valeurs médianes et des valeurs limites supérieures (95e centile) des paramètres pour chaque vitesse, puis les a traduites en courbes déplacement–force représentant les conditions typiques et les pires scénarios.
Transformer l’intuition biomécanique en machines plus sûres
Pour un non-spécialiste, le message principal est simple : la perception de la « dureté » d’un robot par votre doigt dépend fortement de sa vitesse de mouvement, et cette étude fournit une manière nette et quantitative de capturer cet effet. Le nouveau modèle en trois étapes relie la vitesse du robot à la force maximale pouvant survenir lorsque le doigt est serré, fournissant des bornes supérieures conservatrices qui peuvent être intégrées directement dans les normes de sécurité et les stratégies de contrôle des robots. Au-delà du doigt, la même approche peut être adaptée à d’autres régions du corps, aidant les ingénieurs à concevoir des robots collaboratifs qui réagissent assez vite, et assez doucement, pour empêcher qu’un contact quotidien ne dégénère en blessure.
Citation: Liu, J., Akiyama, Y., Fujikawa, T. et al. Towards velocity-dependent nonlinear elasticity of human forefinger soft tissue for specification construction. Sci Rep 16, 13454 (2026). https://doi.org/10.1038/s41598-026-40018-3
Mots-clés: interaction humain-robot, mécanique des tissus mous, sécurité des doigts, robots collaboratifs, modélisation biomécanique