Clear Sky Science · es
Hacia la elasticidad no lineal dependiente de la velocidad del tejido blando del dedo índice humano para la construcción de especificaciones
Por qué importa el contacto robot–humano en la punta del dedo
A medida que los robots salen de sus jaulas y empiezan a trabajar junto a las personas, los golpes y pellizcos accidentales se vuelven inevitables. Nuestros dedos, y en particular la cara dorsal de los mismos, suelen estar más cerca de herramientas y piezas en movimiento, sin embargo las normas de seguridad siguen basándose en estimaciones toscas sobre la fuerza que pueden soportar con seguridad. Este estudio se centra en una pregunta sorprendentemente simple con grandes consecuencias: cuando un robot presiona la parte posterior de tu dedo índice a diferentes velocidades, ¿cómo responde realmente ese tejido blando y cómo puede ese conocimiento hacer a los robots más seguros?
Observando de cerca un punto vulnerable
Los investigadores se centraron en el lado dorsal (posterior) del dedo índice, una zona frecuentemente expuesta durante tareas de montaje y manipulación pero en gran medida ignorada en las normas de seguridad existentes. Las directrices internacionales actuales, como la ISO/TS 15066, establecen límites para fuerzas y presiones en partes de la mano, pero sus modelos subyacentes del tejido blando humano son muy aproximados. O bien tratan la piel como un resorte simple o dependen de fórmulas muy complejas que son difíciles de traducir a reglas prácticas de seguridad. El equipo se propuso construir una vía intermedia: un modelo que capture el comportamiento no lineal real del tejido humano al tiempo que siga siendo lo bastante simple como para integrarlo directamente en el diseño de robots y en especificaciones de seguridad.
Cómo hacen chocar suavemente un robot contra un dedo
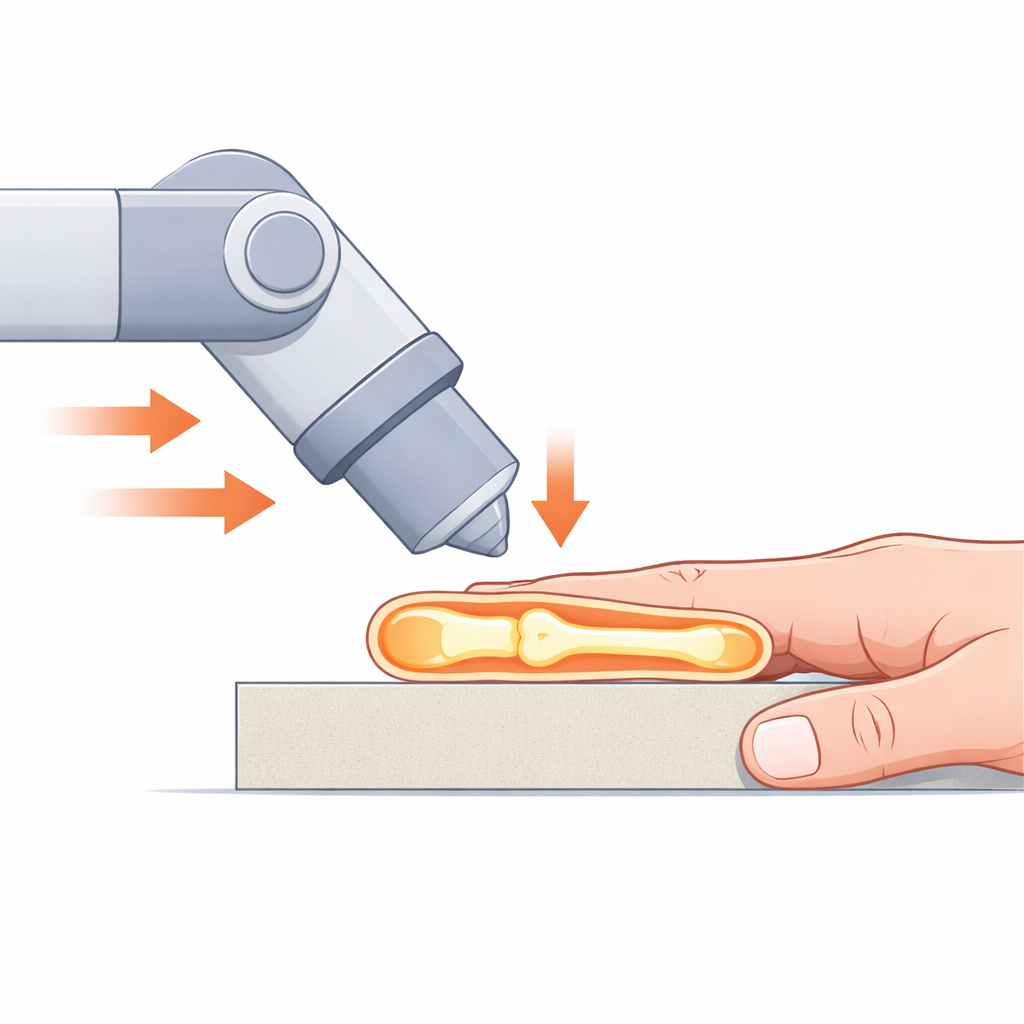
Para estudiar esto de forma segura, los autores construyeron un montaje de ensayo en el que un brazo robótico industrial movía un cilindro metálico redondeado y liso directamente hacia abajo sobre la parte posterior del dedo índice de un voluntario. El dedo se apoyó por debajo, emulando una situación de apriete o pellizco que puede ser particularmente peligrosa. Hardware de protección garantizaba que, si las fuerzas aumentaban demasiado, el soporte se deslizaría y liberaría el dedo. Sensores registraron cuánto se movía el impactador, cuánta fuerza se desarrollaba y exactamente cuándo comenzaba y terminaba el contacto. Participaron 117 voluntarios en total, con edades entre 19 y 89 años. Para cada persona, el robot presionó a cuatro velocidades controladas —desde muy lento (casi estático) hasta bastante rápido—, lo que permitió al equipo trazar cómo crecía la fuerza con la compresión del dedo bajo diferentes velocidades de contacto.
Construyendo un modelo de rigidez simple pero realista
A partir de estos impactos controlados, el equipo extrajo la relación entre cuánto se aplastaba el dedo y la fuerza que éste devolvía. Compararon tres descripciones matemáticas de este comportamiento. Un modelo bi-lineal tradicional asume dos niveles de rigidez representados por rectas con un quiebre brusco entre ellas. Un modelo exponencial curva suavemente pero no reproduce la respuesta casi rectilínea y suave observada en compresiones pequeñas. Los investigadores introdujeron un nuevo modelo de "tres etapas" que conserva regiones de baja y alta rigidez pero las conecta mediante una transición suave, más parecida a una curva blanda que a una esquina. Al ajustar cuidadosamente un parámetro para evitar el sobreajuste, lograron una excelente concordancia con los datos experimentales manteniendo el número de parámetros pequeño y con significado físico. Esto hace que el modelo sea a la vez realista y fácil de incorporar en cálculos de seguridad.
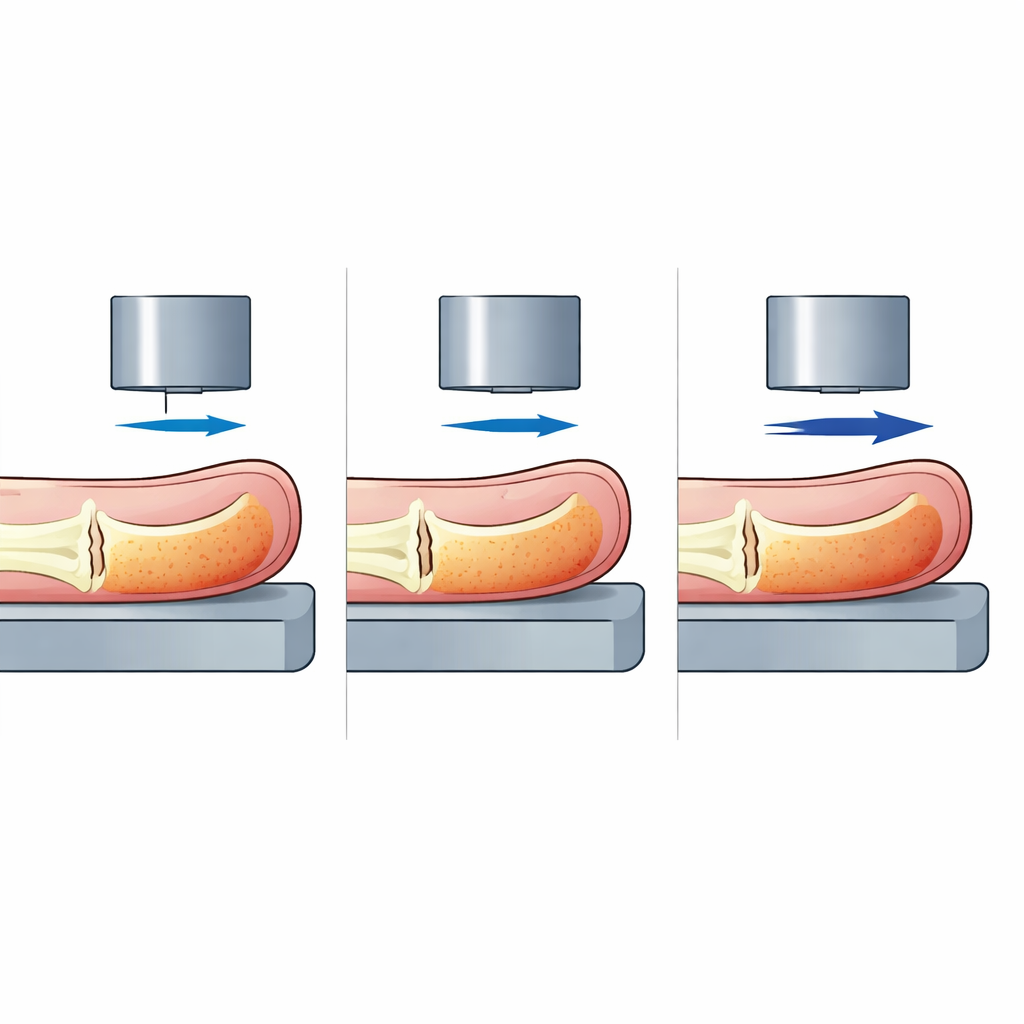
Qué cambia con la velocidad —y qué no
Con el modelo en mano, los autores examinaron cómo variaban sus parámetros con la velocidad de impacto, el sexo y la edad. Encontraron una tendencia clara: la rigidez efectiva aumentaba al elevarse la velocidad de contacto. En otras palabras, cuando el robot presionaba más rápido, la misma compresión del dedo generaba fuerzas mayores —coherente con la naturaleza viscoelástica del tejido vivo. De forma crucial, esta dependencia con la velocidad quedó capturada directamente en los parámetros del modelo. Por el contrario, las diferencias entre hombres y mujeres, y entre participantes más jóvenes y mayores, fueron despreciables tras analizar estadísticamente todos los datos. El equipo resumió sus hallazgos mediante valores de parámetros medianos y límites superiores (percentil 95) para cada velocidad, y luego tradujo estos valores en curvas desplazamiento–fuerza que representan condiciones tanto típicas como de peor caso.
Convirtiendo la visión biomecánica en máquinas más seguras
Para un lego, el mensaje principal es directo: la dureza con la que un robot "se siente" en tu dedo depende en gran medida de la velocidad con la que se mueve, y este estudio proporciona una manera limpia y cuantitativa de capturar ese efecto. El nuevo modelo de tres etapas vincula la velocidad del robot con la fuerza máxima que puede surgir cuando se aprieta el dedo índice, suministrando cotas superiores conservadoras que pueden incorporarse directamente en normas de seguridad y en estrategias de control de robots. Más allá del dedo índice, el mismo enfoque puede adaptarse a otras regiones del cuerpo, ayudando a los ingenieros a diseñar robots colaborativos que reaccionen lo suficientemente deprisa, y con la suavidad adecuada, para evitar que el contacto cotidiano se convierta en lesión.
Cita: Liu, J., Akiyama, Y., Fujikawa, T. et al. Towards velocity-dependent nonlinear elasticity of human forefinger soft tissue for specification construction. Sci Rep 16, 13454 (2026). https://doi.org/10.1038/s41598-026-40018-3
Palabras clave: interacción humano-robot, mecánica de tejidos blandos, seguridad de dedos, robots colaborativos, modelado biomecánico