Clear Sky Science · he
לקראת אי-ליניאריות אלסטית תלויית מהירות ברקמת האצבע האנושית לצורכי בניית מפרטים
מדוע מגע רובוט–אדם בקצה אצבע חשוב
כשרובוטים יוצאים כלואים ומתחילים לעבוד לצד בני אדם, טפיחות וצבטות לא מכוונות נהפכות לבלתי נמנעות. האצבעות שלנו, ובעיקר גביהן, נמצאות לעתים קרובות הכי קרוב לכלים וחלקים נעים, ובכל זאת כללי הבטיחות נשענים עדיין על הערכות גסות לגבי הכוחות שהן יכולות לעמוד בהם בבטחה. המחקר הזה מתמקד בשאלה פשוטה מפתיעה בעלת השלכות גדולות: כאשר רובוט לוחץ על גב האצבע במהירויות שונות, כיצד הרקמה הרכה באמת מגיבה, וכיצד ידע זה יכול להפוך את הרובוטים לבטוחים יותר?
מבט קרוב על נקודה פגיעה
החוקרים התרכזו בצדו הדורסלי (הגב) של האצבע, אזור שנחשף לעתים תכופות במהלך עבודות הרכבה וטיפול אך מוזנח ברוב תקני הבטיחות הקיימים. קווים מנחים בינלאומיים נוכחיים, כגון ISO/TS 15066, מציבים גבולות לכוחות וללחצים על חלקי היד, אך המודלים שלהם של רקמת האדם רופפים למדי. הם מטפלים בעור כספרינג פשוט או מסתמכים על נוסחאות מסובכות שקשה לתרגמן לכללי בטיחות מעשיים. הצוות ביקש לבנות פתרון מתון: מודל שתופס התנהגות לא-ליניארית אמיתית של רקמה אנושית אך נשאר פשוט מספיק כדי להילכד ישירות לתכנון רובוט ובניית מפרטי בטיחות.
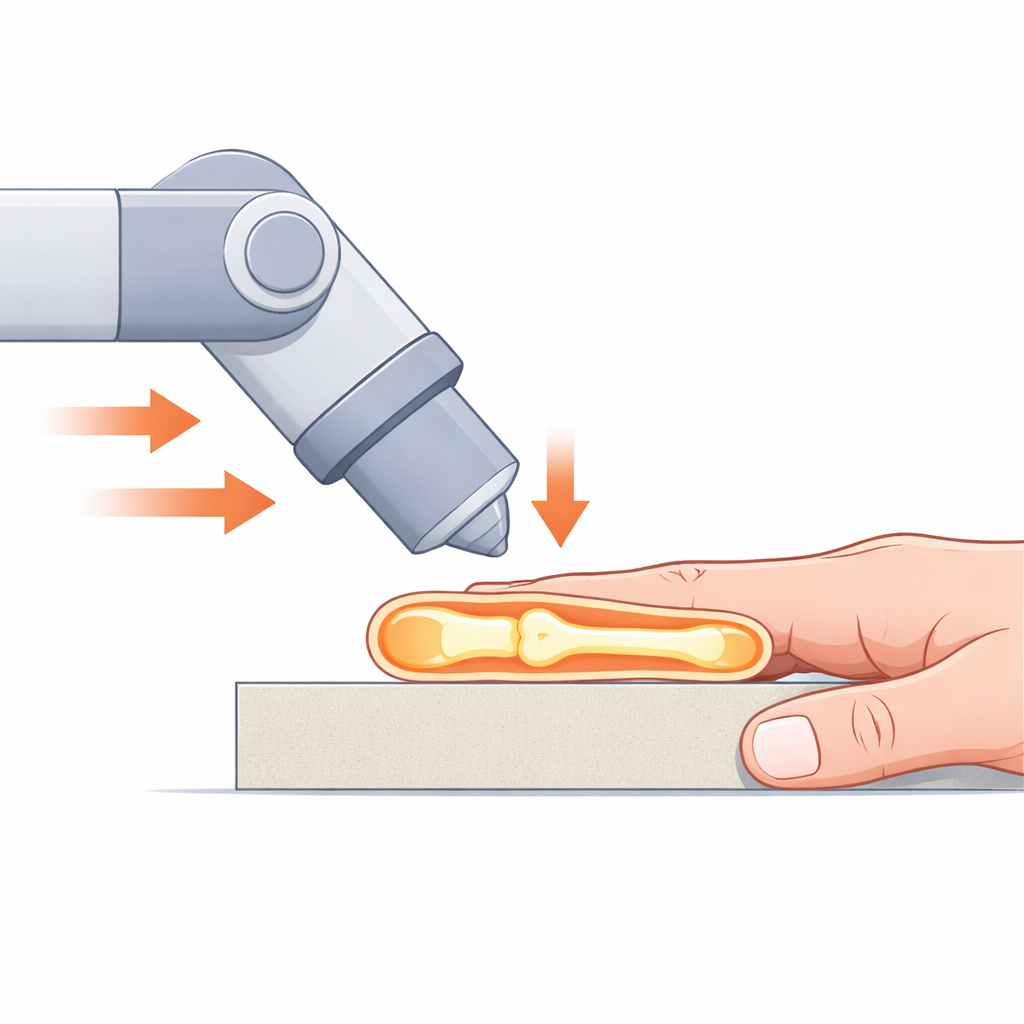
כיצד הם מתנגשים בעדינות עם אצבע
כדי לחקור זאת בבטחה, המחברים בנו מתקן ניסיוני שבו זרוע רובוט תעשייתית הניעה צילינדר מתכתי עגול וחלק ישר מטה אל גב האצבע של מתנדב. האצבע נתמכה מתחתיה, המדמה מצב של לחיצה או צבת שעלול להיות מסוכן במיוחד. ציוד מגן הבטיח שאם הכוחות יהפכו לגדולים מדי, התמיכה תזוז ותשחרר את האצבע. חיישנים הקליטו עד כמה האימפקטור נע, כמה כוח התפתח, ומתי המגע התחיל והסתיים בדיוק. סך הכל 117 מתנדבים בגילאי 19 עד 89 השתתפו. לכל אדם הרובוט לחץ בארבע מהירויות מבוקרות — מאט מאוד (כמעט סטטי) עד די מהיר — מה שאפשר לצוות למפות כיצד הכוח גדל עם דחיסת האצבע תחת מהירויות מגע שונות.
בניית מודל קשיחות פשוט אבל ריאליסטי
מההתנגשויות המבוקרות האלה חילץ הצוות את הקשר בין מידת הדחיסה של האצבע לבין הכוח הדוחף חזרה. הם השוו שלושה תיאורים מתמטיים של התנהגות זו. מודל דו-קווי מסורתי מניח שתי רמות קשיחות בקווים ישרים עם פינה חדה ביניהן. מודל מעריכי מעקם חלקות אבל נכשל להראות את התגובה כמעט הישרה והעדינה שנראית בדחיסות קטנות. החוקרים הציגו מודל חדש "תלת-שלבי" שיש בו עדיין אזורי קשיחות נמוכה וגבהה אך מקשר ביניהם עם מעבר חלק, יותר כמו כיפוף רך מאשר זווית חדה. באמצעות כוונון מדוד של פרמטר אחד למניעת התאמה-יתר הם השיגו התאמה מצוינת לנתוני הניסוי תוך שמירה על מספר פרמטרים קטן ובעלי משמעות פיזיקלית. זה עושה את המודל גם ריאליסטי וגם קל להטמעה בחישובי בטיחות.
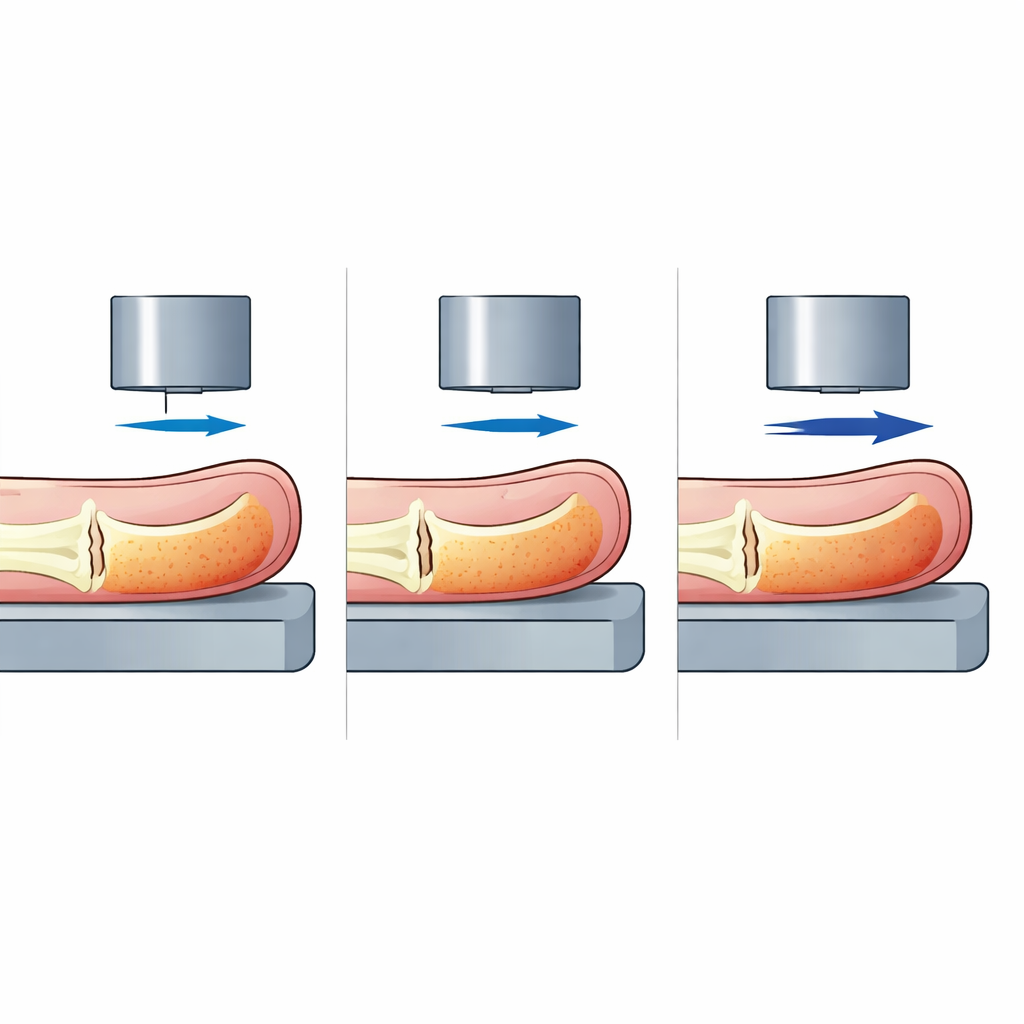
מה משתנה עם המהירות — ומה לא
עם המודל ביד, המחברים בדקו כיצד הפרמטרים שלו השתנו בהתאם למהירות המכה, למגדר ולגיל. הם מצאו מגמה ברורה: הקשיחות היעילה עלתה כשהירות המגע עלתה. במילים אחרות, כשהרובוט לחץ מהר יותר, אותה דחיסת אצבע גרמה לכוחות גבוהים יותר — תואם לטבע הויסקו-אלסטי של רקמה חיה. החשוב הוא שהתלות במהירות זו הושגה ישירות בפרמטרי המודל. לעומת זאת, ההבדלים בין גברים לנשים, ובין משתתפים צעירים וזקנים, היו מזעריים לאחר ניתוח סטטיסטי של כל הנתונים. הצוות סיכם את ממצאיו כערכי חציון וגבול עליון (קשור לאחוזון ה-95) של הפרמטרים לכל מהירות, ואז תרגם אותם לעקומות הזזה–כוח המייצגות תנאים טיפוסיים וגם מקרים גרועים קיצוניים.
להפוך תובנה ביומכנית למכונות בטוחות יותר
לאיש מן השורה, המסר העיקרי פשוט: כמה "קשה" רובוט נתפס על ידי אצבעך תלוי בחוזקה במהירות התנועה שלו, והמחקר מספק דרך נקייה וכמותית ללכוד אפקט זה. המודל התלת-שלבי החדש מקשר בין מהירות הרובוט לכוח המקסימלי שעשוי להיווצר כאשר האצבע נתפסת, ומספק גבולות עליונים שמרניים שניתן לשלב ישירות בתקני בטיחות ובאסטרטגיות בקרה של רובוטים. מעבר לאצבע, אותו גישה ניתנת להתאמה לאזורים אחרים בגוף, ועוזרת למהנדסים לתכנן רובוטים שיתופיים שמגיבים במהירות מספקת, וברכות מספקת, כדי למנוע ממגע יומיומי להפוך לפציעה.
ציטוט: Liu, J., Akiyama, Y., Fujikawa, T. et al. Towards velocity-dependent nonlinear elasticity of human forefinger soft tissue for specification construction. Sci Rep 16, 13454 (2026). https://doi.org/10.1038/s41598-026-40018-3
מילות מפתח: אינטראקציה אדם-רובוט, מכניקת רקמות רכות, בטיחות אצבע, רובוטים שיתופיים, מידול ביומכני