Clear Sky Science · ja
仕様策定のための指先軟組織の速度依存非線形弾性に向けて
なぜ指先でのロボットと人の接触が重要なのか
ロボットが囲いから出て人と並んで働くようになると、偶発的なぶつかりやつねりは避けられなくなります。特に指、なかでも背側(指背)は可動部や工具に近くなることが多いにもかかわらず、安全規則は依然としてどれだけの力に耐えられるかについて粗い推定に頼っています。本研究は影響の大きい一見単純な問いに焦点を当てます:ロボットが前指の背側を異なる速度で押したとき、軟組織は実際にどのように反力を示すのか、そしてその知見はロボットの安全性向上にどう役立つのか?
脆弱な部位を詳しく調べる
研究者たちは前指の背側に着目しました。この領域は組み立てや取り扱い作業で露出しやすいにもかかわらず、既存の安全基準ではほとんど扱われていません。ISO/TS 15066などの国際ガイドラインは手の各部位に対する力や圧力の上限を提示していますが、そこに使われている人体軟組織のモデルは非常に粗いものです。皮膚を単純なバネと見なすか、あるいは実務的な安全規則に落とし込みにくい複雑な式に頼るかのどちらかになりがちです。研究チームはその中間を目指しました:人体組織の非線形性を捉えつつ、ロボット設計や安全仕様に直接組み込めるだけのシンプルさを保つモデルです。
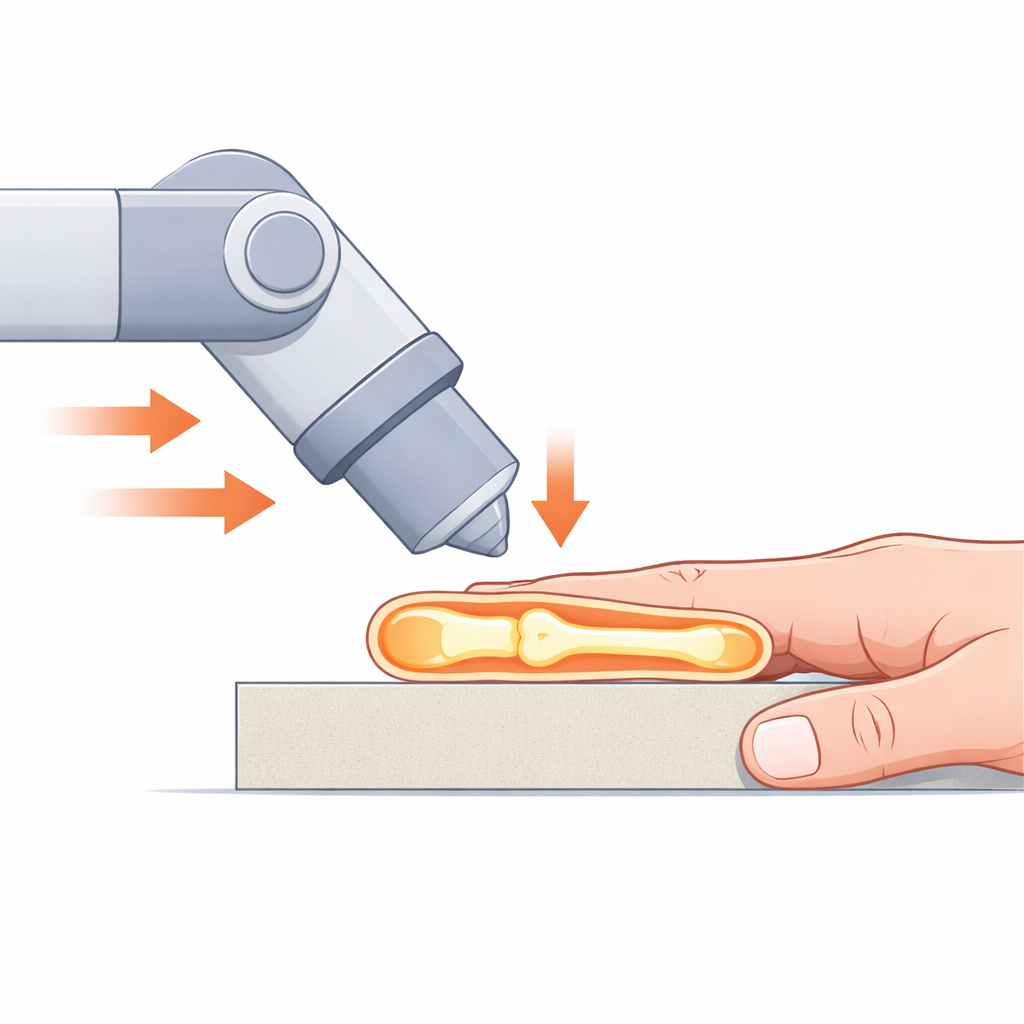
ロボットを指にやさしく衝突させる方法
安全に検証するため、著者らは産業用ロボットアームで滑らかで丸い金属シリンダーをボランティアの前指背側に垂直に押し付ける試験装置を構築しました。指は下から支えられ、クランプやつねりの状況を模した配置としました。保護用ハードウェアは、力が過大になった場合に支持部が滑って指を解放する仕組みになっていました。センサーはインパクターの移動量、発生した力、接触の開始と終了の時点を記録しました。19歳から89歳までの合計117人が参加し、各被験者についてロボットは非常に遅い(ほぼ静的)ものからかなり速いものまで、4段階の制御速度で押し付けました。これにより、接触速度が異なる条件下で指の圧縮に伴う力の増え方を詳細に描くことができました。
シンプルで現実的な剛性モデルの構築
これらの制御衝突試験から、指の圧縮量と反力の関係を抽出しました。研究チームはこの挙動を表す三つの数学的記述を比較しました。従来の二線形モデルは二つの直線的な剛性領域を鋭い折れ点でつなぐ仮定を置きます。指数モデルは滑らかに曲がりますが、小さな圧縮で見られるほぼ直線的で穏やかな応答を再現できません。研究者たちは新たに「三段階」モデルを導入しました。これは低剛性と高剛性の領域を持ちながら、それらを角ではなく柔らかな曲がりでつなぎます。過学習を避けるために一つのパラメータを慎重に調整することで、実験データとの優れた一致を達成しつつ、パラメータ数を少なく、物理的に意味のあるものに保ちました。このことが、モデルを現実的で安全計算に組み込みやすいものにしています。
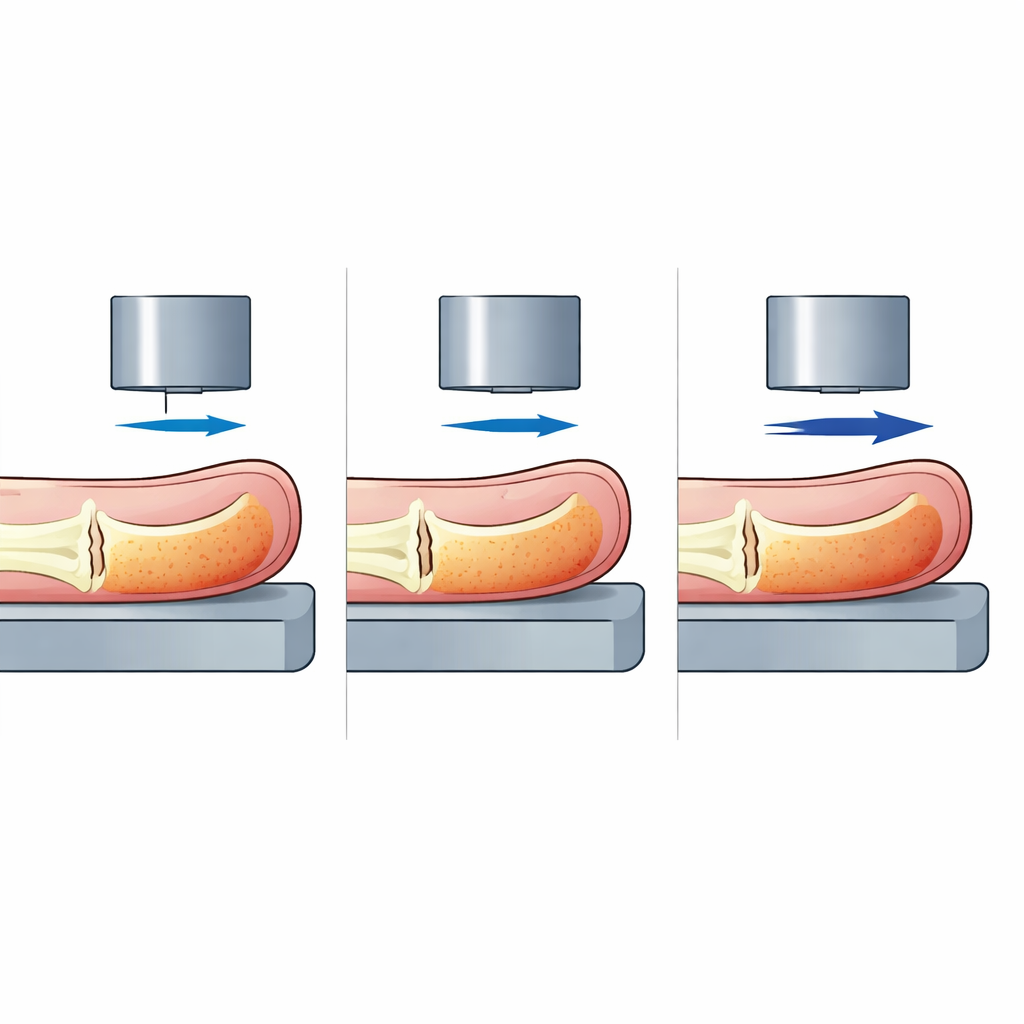
速度で変わるものと変わらないもの
モデルを得たあと、著者らはそのパラメータが衝突速度、性別、年齢でどのように変化するかを調べました。明確な傾向が見られました:接触速度が上がるにつれて有効剛性は増加しました。つまりロボットが速く押すほど、同じ圧縮量でより大きな力が生じる——これは生体組織の粘弾性の性質と一致します。重要な点は、この速度依存性がモデルのパラメータに直接組み込まれていることです。一方で、男女間や若年層と高齢層の差は、統計的に解析するとほとんど無視できるものでした。チームは各速度に対して中央値と上限(95パーセンタイル)のパラメータ値をまとめ、これを典型的および最悪ケースを表す変位–力曲線に変換しました。
生体力学的知見をより安全な機械へつなげる
一般向けに言えば、主なメッセージは明快です:ロボットが指にどれだけ「硬く感じられる」かは動作速度に強く依存し、本研究はその効果を定量的に捉える明瞭な方法を提示しています。新しい三段階モデルはロボット速度と前指がクランプされたときに生じうる最大力を結び付け、安全規格やロボット制御戦略に直接組み込める保守的な上限値を提供します。前指以外の部位にも同じアプローチを応用でき、協働ロボットが日常的な接触を損傷に至らせないよう、十分に迅速かつ十分にやわらかく反応する設計を支援します。
引用: Liu, J., Akiyama, Y., Fujikawa, T. et al. Towards velocity-dependent nonlinear elasticity of human forefinger soft tissue for specification construction. Sci Rep 16, 13454 (2026). https://doi.org/10.1038/s41598-026-40018-3
キーワード: 人間-ロボット相互作用, 軟組織力学, 指の安全性, 協働ロボット, 生体力学モデリング