Clear Sky Science · zh
可编程体感软体机器人
能够感知触碰的软体机器人
想象一只足够温柔的机器人手,可以从一堆水果中摘下一颗熟透的草莓而不将其压扁,并且足够聪明地判断是否正好拿到了那颗。本文介绍了一种新型软体机器人夹持器,由含水量高、质地柔软的材料制成,既能运动又能感知自身形状,类似于我们的皮肤和肌肉。通过巧妙地将加热和感测功能直接构筑进材料中,作者们创造出一种可编程的“体感”软体机器人,能与简单电子器件配合并以极低能耗工作。
为什么细腻触感对机器人如此困难
机器人在重物搬运和精确重复任务上已经表现出色,但在处理脆弱物体(如水果、医学样本或柔软消费品)时仍有困难。传统的软体夹持器常需使用泵、阀或笨重硬件来驱动和感知接触,这使得系统复杂、噪声大且难以小型化。另一种方法是使用对环境变化(例如加热)有反应的特殊材料。一种常见的水凝胶是PNIPAM:在约体温以下它会吸水膨胀,超过该温度则收缩。理论上,这种收缩与膨胀可转化为运动。但在实践中,PNIPAM通常需要加热整个环境才能触发,速度慢、耗能大,并且不适合对温度敏感的环境,例如活体组织。
将柔软颗粒变成肌肉与神经
研究人员通过使用“颗粒状水凝胶”来应对这一挑战:将微小柔软的凝胶颗粒紧密堆砌,然后化学连接成一个固态但仍非常柔软的整体。他们制备了三种材料版本。一种作为可驱动的“肌肉”:基于PNIPAM,在超过触发温度时会强烈弯曲。第二种作为传感层:含有导电聚合物,其电阻会在拉伸或弯曲时改变。第三种通过加入氯化锌和更多导电聚合物制成,作为柔性加热体:当电流通过时,通过焦耳加热产生热量。因为三者具有相似的柔软性,它们可以叠层组合而不会形成易裂或疲劳的硬点。团队展示了这些颗粒凝胶比化学成分相似的散装水凝胶具有更大的弯曲、更快的响应和更可靠的回复性能。
仅在关键处加热
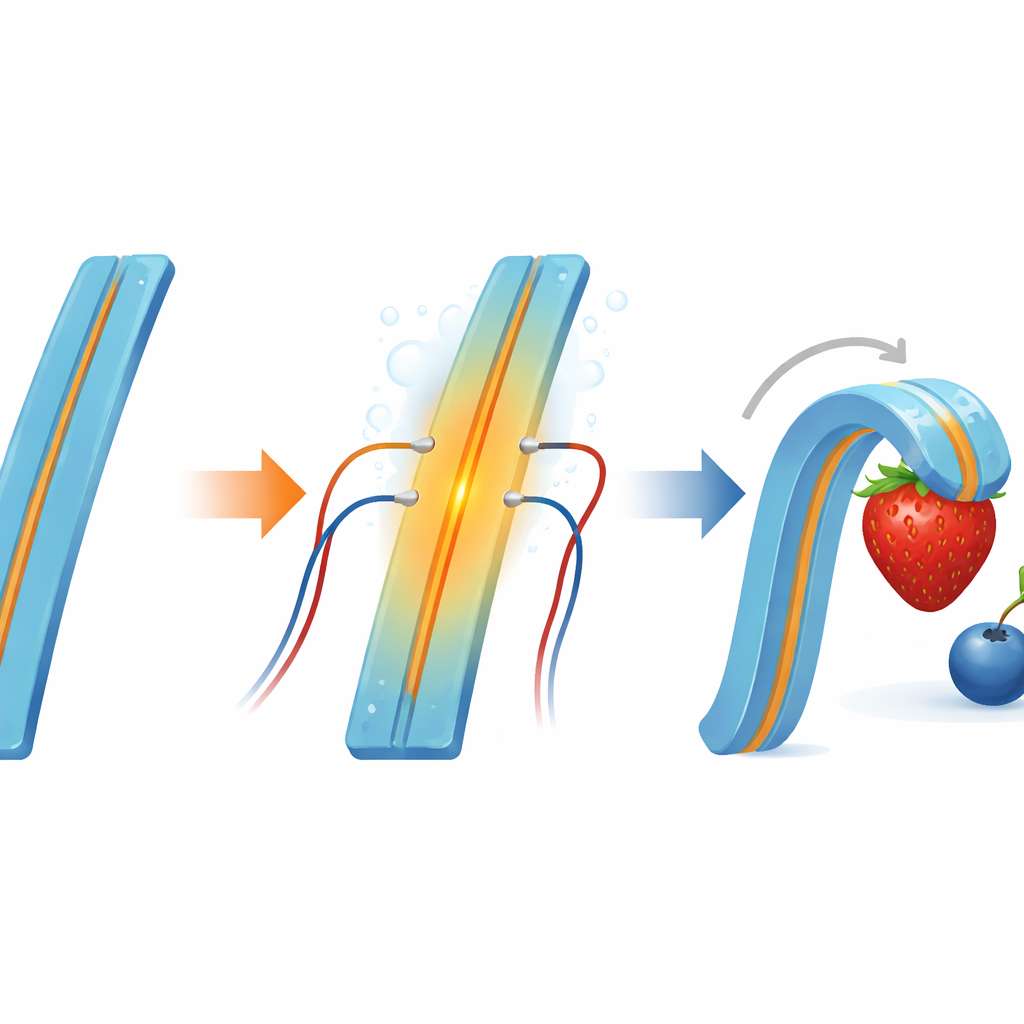
为了避免加热整个环境,作者将加热材料的细薄线路直接嵌入夹持器的弯曲层内。当仅施加5伏电压时,这些线路足以使PNIPAM层跨越其相变温度,从而收缩并弯曲。精确的电学测量显示,来自氯化锌离子和导电聚合物的组合既产生离子通路也产生电子通路,能高效地将电能转化为局部热量,同时整体结构仍保持与夹持器其他部分一样柔软且可拉伸。关键是,距器件仅一厘米的水温升幅很小,表明热量主要局限在执行器自身。这种定向加热降低了能耗,并使系统在与生物组织或温度敏感物品接触时更安全。
打印一只知道何时放手的机器人手
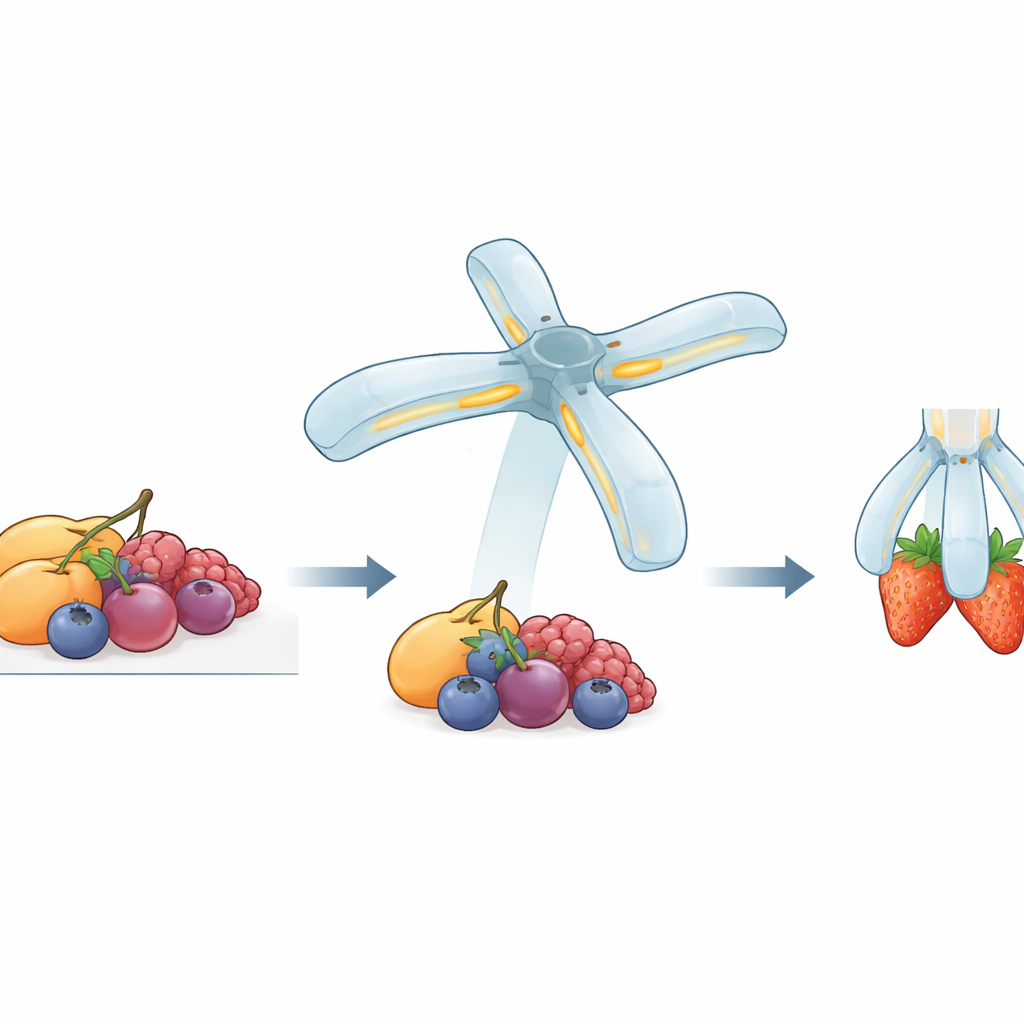
由于堆积的微凝胶油墨在受压下可流动但很快再固化,它们可以用于3D打印出定制形状。作者打印出一个十字形的掌心大小夹持器,每个手指都包含一层可驱动的PNIPAM、一个传感层和一条中央加热线。通过调节打印图案和厚度,他们在保持材料极软(肖氏硬度低于10A)并将功耗控制在约2瓦的同时,达到了高达180度的弯曲角度。内置传感层将手指弯曲和与物体接触转换为电阻变化。将该信号连接到简单控制器和机械臂后,可用于闭环控制:夹持器加热、缠绕物体、通过电阻变化识别是否夹到合适大小的物体,然后告知机械臂何时抬起或释放。
用触觉分拣水果
为展示这种体感能力的用途,研究人员在混合的草莓、葡萄和橙子上测试了夹持器。约35克重的夹持器能够举起约为自身重量三倍的物体。更重要的是,传感信号的模式会根据所夹水果的大小而变化:小草莓会引起更大的弯曲,从而产生更显著的电阻变化,而一串葡萄或一个橙子的变化较小。通过设置简单的阈值,控制器可被编程为仅在出现“草莓信号”时继续提起,并释放任何更大的物体。这使得在无需摄像头或复杂算法的情况下,仅凭软体自身的形变感知就能实现基本的物体识别与分拣。
对未来温柔机器的意义
通俗来说,这项工作展示了如何构建一只非常温和、能效高、且能感知自身动作的机器人手,采用更像果冻而非金属的材料。通过将加热与感测直接织入可打印的软性水凝胶,团队克服了温度驱动材料和笨重软体机器人硬件长期存在的缺点。结果是一种可编程、低电压的软体夹持器,能够举起易碎物品、根据大小决定保留与否,并在敏感环境中工作而不致过热。此类体感软体机器人未来可望应用于自动化食品处理、实验室自动化或需要安全、谨慎触碰的医疗设备中。
引用: Georgopoulou, A., Aguiriano Calvo, M., Lucherini, L. et al. Programmable somatosensory soft robots. npj Flex Electron 10, 58 (2026). https://doi.org/10.1038/s41528-026-00558-0
关键词: 软体机器人, 水凝胶驱动器, 智能夹持器, 响应性材料, 机器人传感