Clear Sky Science · nl
Programmeerbare somatosensorische zachte robots
Zachte robots die kunnen voelen wat ze aanraken
Stel je een robothand voor die zacht genoeg is om een rijpe aardbei uit een fruitschaal te plukken zonder deze te pletten, en slim genoeg om te weten wanneer hij de juiste heeft. Dit artikel presenteert een nieuw soort zachte robotgrijper gemaakt van kneedbare, waterrijke materialen die zowel kunnen bewegen als hun eigen vorm kunnen waarnemen, vergelijkbaar met onze huid en spieren. Door verwarming en sensing slim in het materiaal zelf te integreren, creëren de auteurs een programmeerbare “somatosensorische” zachte robot die werkt met eenvoudige elektronica en zeer weinig energie.
Waarom delicaat aanraken zo moeilijk is voor robots
Robots zijn uitstekend geworden in zware hijs- en precieze, repetitieve taken, maar ze hebben moeite met breekbare voorwerpen zoals fruit, medische monsters of zachte consumentenproducten. Traditionele zachte grijpers hebben vaak pompen, kleppen of omvangrijke hardware nodig om te bewegen en contact te detecteren, waardoor ze complex, luidruchtig en moeilijk te verkleinen zijn. Een andere benadering is het gebruik van speciale “responsieve” materialen die bewegen wanneer hun omgeving verandert, bijvoorbeeld bij verwarming. Een bekend voorbeeld is de hydrogel PNIPAM: onder ongeveer lichaamstemperatuur zwelt hij met water, erboven krimpt hij. In principe kan dat krimpen en zwellen in beweging worden omgezet. In de praktijk moet PNIPAM meestal worden verwarmd door de hele omgeving op te warmen, wat traag, energie-intensief en ongeschikt is voor temperatuurgevoelige omgevingen zoals levend weefsel.
Het omzetten van kneedbare bolletjes in spieren en zenuwen
De onderzoekers pakken deze uitdaging aan door hun grijper te bouwen uit “granulaire hydrogels”: kleine zachte geldeeltjes die op elkaar zijn gejamd en vervolgens chemisch zijn verbonden tot een vaste, maar nog steeds zeer zachte, structuur. Ze maken drie varianten van dit materiaal. De ene variant fungeert als bewegende spier: gebaseerd op PNIPAM en buigt sterk wanneer deze boven zijn schakeltemperatuur wordt verwarmd. Een tweede variant fungeert als sensor: deze bevat een geleidende polymeer waardoor de elektrische weerstand verandert bij rek of buiging. Een derde variant, gemaakt door zinksalt en extra geleidende polymeer toe te voegen, werkt als flexibele verwarming: wanneer elektriciteit erdoorheen stroomt, warmt hij op door Joule-verarming. Omdat alle drie dezelfde zachtheid delen, kunnen ze in gelaagde structuren worden gecombineerd zonder stijve plekken te creëren die zouden barsten of vermoeien. Het team toont aan dat deze granulaire gels meer buigen, sneller reageren en betrouwbaarder terugveren dan conventionele bulkhydrogels met vergelijkbare chemie.
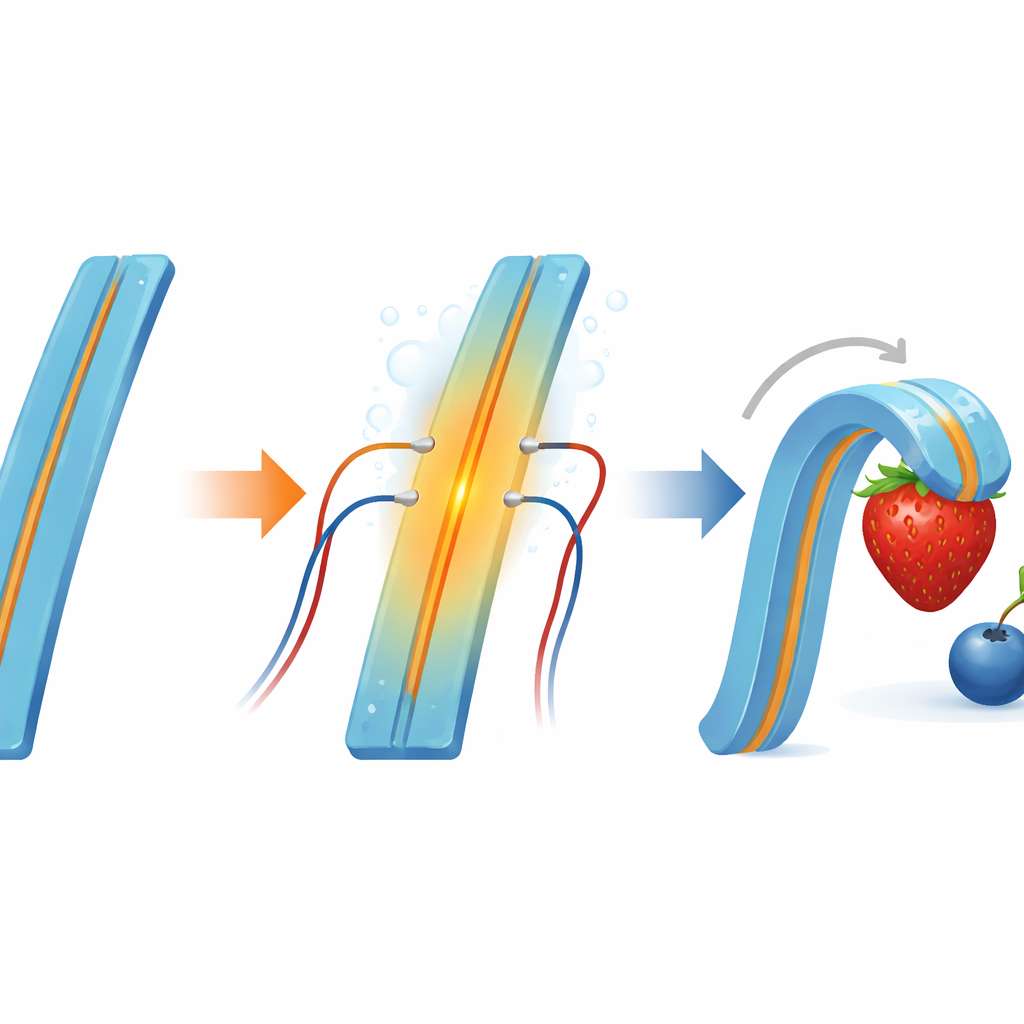
Alleen verwarmen waar het ertoe doet
Om te voorkomen dat de hele omgeving opwarmt, plaatsen de auteurs dunne banen van het verwarmingsmateriaal direct in de buiglaag van de grijper. Wanneer slechts 5 volt wordt aangelegd, worden deze banen net genoeg verwarmd om de PNIPAM-laag over zijn overgangstemperatuur te brengen, waardoor deze samentrekt en buigt. Zorgvuldige elektrische metingen laten zien dat de combinatie van ionen uit zinkchloride en de geleidende polymeer zowel ionische als elektronische paden creëert die elektrische energie efficiënt in lokale warmte omzetten, terwijl de algehele structuur even zacht en rekbaar blijft als de rest van de grijper. Cruciaal is dat het water op slechts een centimeter afstand van het apparaat slechts licht opwarmt, wat aantoont dat de warmte grotendeels in de actuator wordt gehouden. Deze gerichte verwarming vermindert het energieverbruik en maakt het systeem veiliger voor contact met biologisch weefsel of temperatuurgevoelige goederen.
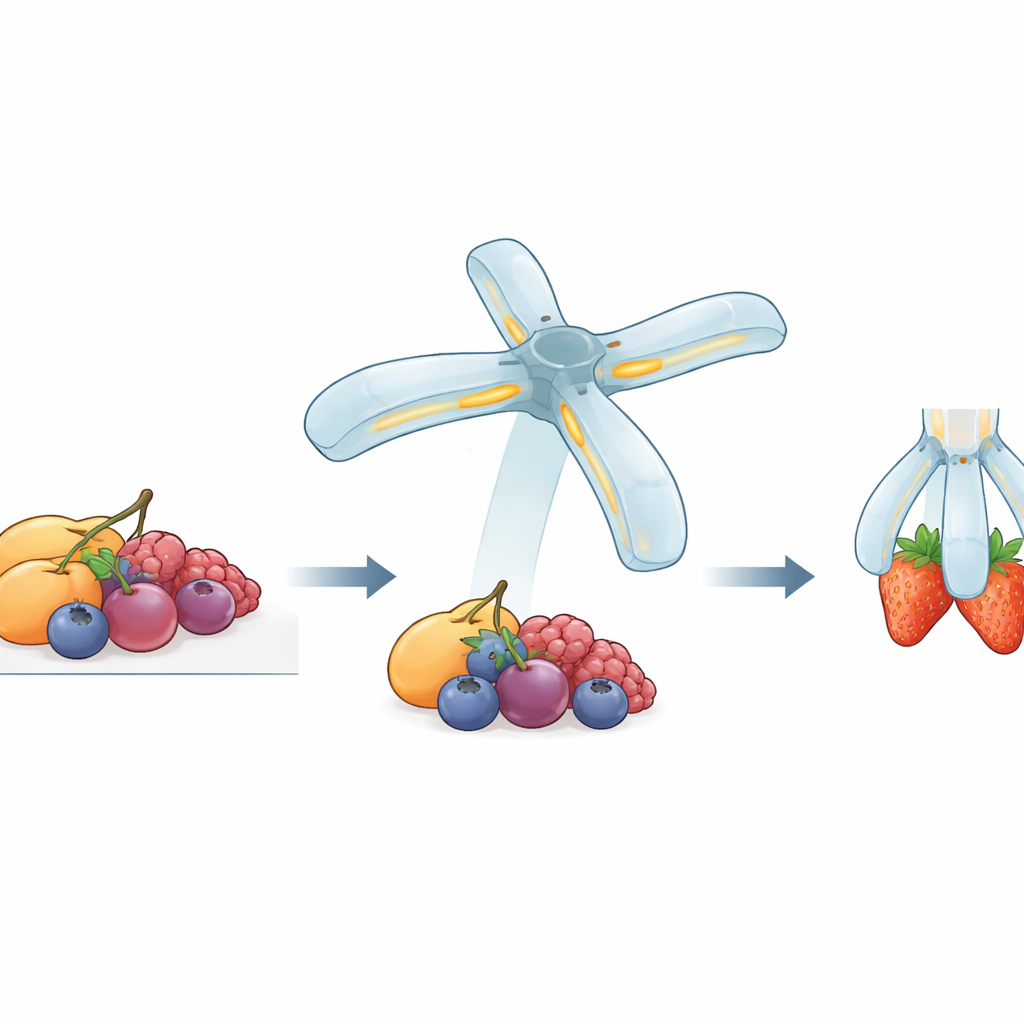
Een robothand printen die weet wanneer los te laten
Omdat de gejamde microgel-inks onder druk vloeien maar snel weer verstenen, kunnen ze in 3D worden geprint tot aangepaste vormen. De auteurs printen een kruislings gevormde, handpalmgrootte grijper waarvan elke vinger een bewegende PNIPAM-laag, een sensorlaag en een centrale verwarmingslijn bevat. Door printpatronen en dikte af te stemmen, bereiken ze buighoeken tot 180 graden terwijl het materiaal extreem zacht blijft (Shore-hardheid onder 10 A) en het energieverbruik rond de 2 watt ligt. De ingebouwde sensorlaag zet vingerbuiging en contact met een object om in een verandering van elektrische weerstand. Aangesloten op een eenvoudige controller en een robotarm wordt dit signaal gebruikt voor gesloten-lusbesturing: de grijper verwarmt, krult om een object, herkent aan de grootte van de weerstandverandering wanneer hij iets van de juiste afmetingen heeft vastgepakt, en geeft vervolgens aan de arm door wanneer hij moet optillen of loslaten.
Fruit sorteren met een gevoel voor aanraking
Om te laten zien wat deze somatosensorische mogelijkheid kan, testen de onderzoekers de grijper op een mix van aardbeien, druiven en sinaasappels. Een grijper van ongeveer 35 gram kan objecten tillen tot ruwweg drie keer zijn eigen gewicht. Belangrijker is dat het patroon van het sensorsignaal verschilt afhankelijk van de grootte van het vastgehouden fruit: kleine aardbeien veroorzaken een grotere buiging en dus een grotere verandering in weerstand dan een tros druiven of een sinaasappel. Door een eenvoudige drempel in te stellen, kan de controller zo geprogrammeerd worden dat hij alleen blijft optillen wanneer het "aardbei-signaal" verschijnt en alles wat groter is loslaat. Dit maakt basisobjectherkenning en sortering mogelijk zonder camera's of complexe algoritmen, met alleen het eigen gevoelsvermogen van de zachte structuur voor vervorming.
Wat dit betekent voor toekomstige zachte machines
In alledaagse termen laat dit werk zien hoe je een zeer zachte, energiezuinige robothand kunt bouwen die voelt wat hij doet, met materialen die dichter bij gelei dan bij metaal liggen. Door verwarming en sensing direct in een zacht, printbaar hydrogel te weven, overwinnen de onderzoekers langbestaande nadelen van temperatuurgestuurde materialen en omvangrijke zachte-robotica-hardware. Het resultaat is een programmeerbare, laagspannings zachte grijper die delicate voorwerpen kan optillen, kan beslissen welke ervan te bewaren op basis van hun grootte, en kan werken in gevoelige omgevingen zonder deze te oververhitten. Dergelijke somatosensorische zachte robots zouden op een dag kunnen helpen bij geautomatiseerde voedselverwerking, laboratoriumautomatisering of medische apparaten waar veilige, zorgvuldige aanraking essentieel is.
Bronvermelding: Georgopoulou, A., Aguiriano Calvo, M., Lucherini, L. et al. Programmable somatosensory soft robots. npj Flex Electron 10, 58 (2026). https://doi.org/10.1038/s41528-026-00558-0
Trefwoorden: zachte robotica, hydrogel-actuatoren, slimme grippers, responsieve materialen, robotische sensoren