Clear Sky Science · ar
روبوتات لينة حسية قابلة للبرمجة
روبوتات لينة تستطيع الإحساس بما تلمسه
تخيل يد روبوت لطيفة بما يكفي لالتقاط فراولة ناضجة من كومة فواكه دون سحقها، وذكية بما يكفي لمعرفة متى أمسكته صحيحة. تعرض هذه الورقة نوعًا جديدًا من الملاقط الروبوتية اللينة المصنوعة من مواد رخوة وغنية بالماء يمكنها أن تتحرك وتستشعر شكلها بنفسها، مشابهة لجلدنا وعضلاتنا. من خلال دمج وظائف التسخين والاستشعار مباشرة في المادة، يصنع المؤلفون روبوتًا لينًا «حسيًا جسديًا» قابلاً للبرمجة يعمل بإلكترونيات بسيطة وبكفاءة طاقة منخفضة.
لماذا اللمس الدقيق صعب على الروبوتات
تفوقت الروبوتات في الرفع الثقيل والمهام المتكررة الدقيقة، لكنها تعاني مع الأشياء الهشة مثل الفاكهة أو عينات طبية أو سلع استهلاكية لينة. غالبًا ما تحتاج الملاقط اللينة التقليدية إلى مضخات أو صمامات أو مكونات كبيرة للتحريك والاستشعار، ما يجعلها معقدة وصاخبة وصعبة التصغير. نهج آخر هو استخدام مواد «مستجيبة» تتحرك عندما يتغير محيطها، مثل الاستجابة للحرارة. مثال شائع هو هلام مائي يدعى PNIPAM: تحت درجة حرارة تقارب حرارة الجسم يتمدد بماء، وفوقها ينكمش. من الناحية النظرية يمكن تحويل هذا الانكماش والتمدد إلى حركة. في التطبيق العملي، عادةً ما يجب تسخين PNIPAM عن طريق تدفئة البيئة بأكملها، وهو ما يكون بطيئًا ويستهلك طاقة كبيرة وغير مناسب للأوساط الحساسة للحرارة مثل الأنسجة الحية.
تحويل الحبيبات الرخوة إلى عضلات وأعصاب
يتصدى الباحثون لهذا التحدي ببناء ملاقطهم من «هلاميات مائية حبيبية»: جزيئات هلام ناعمة ومحشورة معًا ثم مرتبطة كيميائيًا لتكوّن جسمًا صلبًا نسبيًا لكنه لا يزال ناعمًا للغاية. يصنعون ثلاث نسخ من هذه المادة. النسخة الأولى تعمل كعضلة متحركة: قائمة على PNIPAM وتنثني بقوة عند تسخينها فوق درجة الحرارة المحفزة. النسخة الثانية تعمل كمستشعر: تحتوي على بوليمر موصل فتتغير مقاومتها الكهربائية عند شدها أو ثنيها. النسخة الثالثة، المصنوعة بإضافة ملح الزنك وبوليمر موصل أكثر، تعمل كسخان مرن: عندما يمر تيار كهربائي خلالها، تسخن عبر تأثير جول. نظرًا لأن الثلاثة تشترك في ليونة مماثلة، يمكن دمجها في طبقات دون خلق بقع صلبة قد تتشقق أو تتعرض للإجهاد. تُظهر التجارب أن هذه الهلاميات الحبيبية تنثني أكثر وتستجيب أسرع وتعود إلى حالتها الأصلية بمزيد من الاعتمادية مقارنةً بالهلاميات التقليدية الكتلية ذات الكيمياء المماثلة.
التسخين فقط حيث يهم
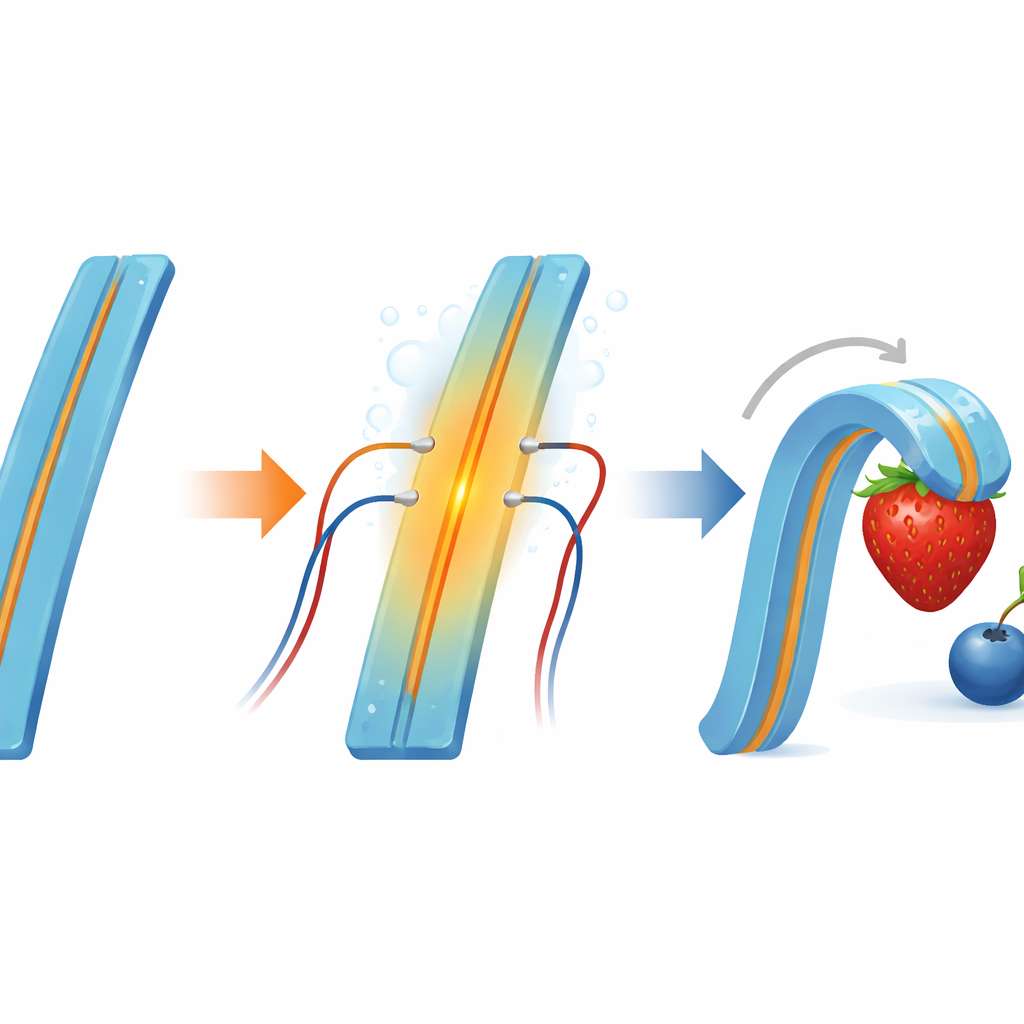
لتجنب تدفئة البيئة بأكملها، يدمج المؤلفون مسارات رقيقة من مادة التسخين مباشرة داخل طبقة الانثناء في الملقط. عند تطبيق 5 فولت فقط، تسخن هذه المسارات بدرجة كافية لدفع طبقة PNIPAM عبر درجة حرارتها الانتقالية، مما يجعلها تنكمش وتنثني. تكشف قياسات كهربائية دقيقة أن مزيج الأيونات من كلوريد الزنك والبلمر الموصل يخلق مسارات أيونية وإلكترونية تحول الطاقة الكهربائية بكفاءة إلى حرارة موضعية، بينما تظل البنية الإجمالية لينة وقابلة للتمدد مثل بقية الملقط. والأهم من ذلك، أن الماء على بعد سنتيمتر واحد من الجهاز يسخن قليلاً فقط، مما يدل على أن الحرارة محصورة في المحرك نفسه إلى حد كبير. هذا التسخين المستهدف يقلل استهلاك الطاقة ويجعل النظام أكثر أمانًا للتلامس مع الأنسجة البيولوجية أو السلع الحساسة للحرارة.
طباعة يد روبوت تعرف متى تترك
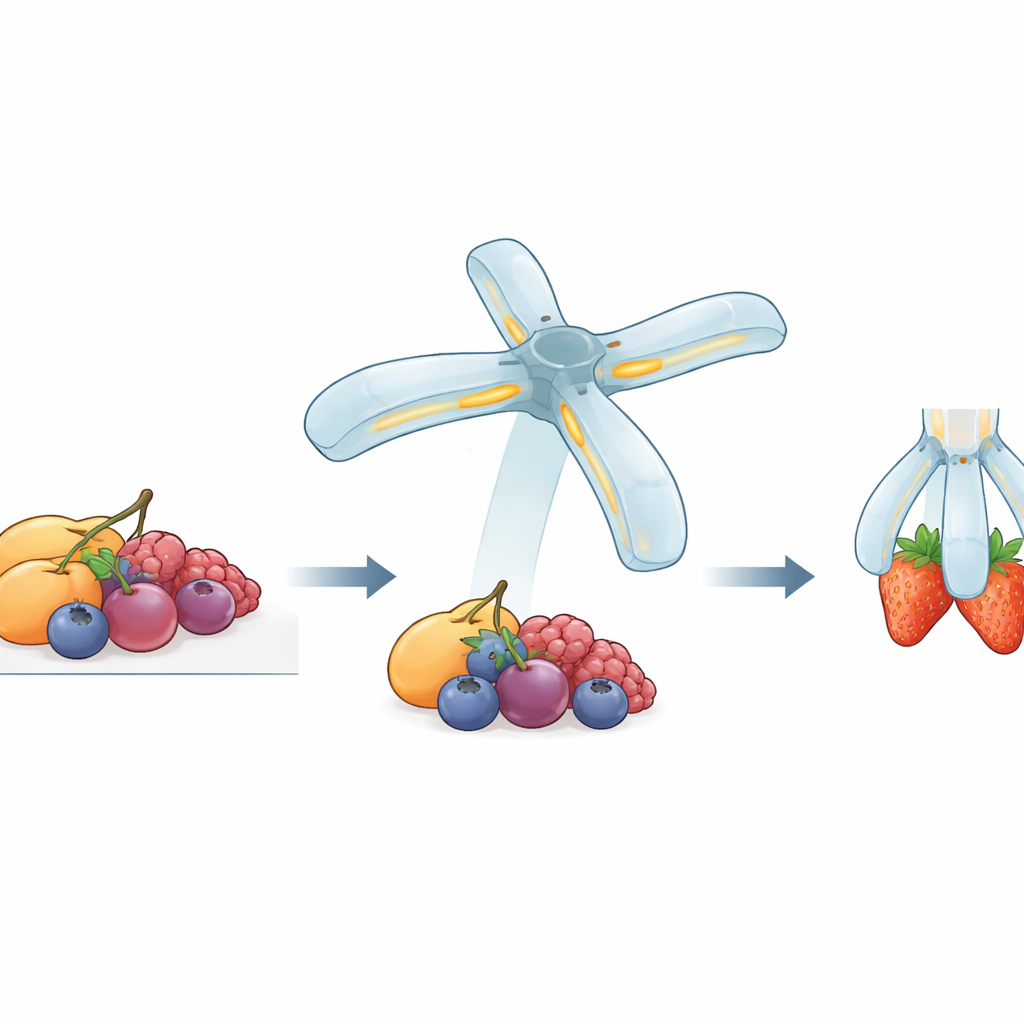
نظرًا لأن أحبار الميكروهلام المحشورة تتدفق تحت الضغط لكنها تتصلب بسرعة مرة أخرى، يمكن طباعتها ثلاثية الأبعاد بأشكال مخصصة. يطبع المؤلفون ملقطًا بحجم كف اليد بشكل مصليب تحتوي أصابع كل منها على طبقة PNIPAM متحركة، وطبقة استشعار، وخط تدفئة مركزي. من خلال ضبط أنماط الطباعة والسماكة، يصلون إلى زوايا انثناء تصل إلى 180 درجة مع المحافظة على ليونة المادة بشكل كبير (صلابة شور أقل من 10 A) واستهلاك طاقة حوالي 2 واط. تحول طبقة المستشعر المدمجة انثناء الإصبع والتلامس مع جسم إلى تغير في المقاومة الكهربائية. متصلًا بوحدة تحكم بسيطة وذراع روبوت، يُستخدم هذا الإشارة للتحكم في حلقة مغلقة: يسخن الملقط، ويلتف حول الجسم، ويتعرف على أنه أمسك شيئًا بالحجم الصحيح عبر مقدار تغير المقاومة، ثم يخبر الذراع متى يرفع أو يطلق.
فرز الفاكهة بحس اللمس
لإظهار ما يمكن أن تفعله هذه القدرة الحسية الجسدية، يختبر الباحثون الملقط على مزيج من الفراولة والعنب والبرتقال. يمكن لملقط يزن نحو 35 غرامًا أن يرفع أشياء تزن تقريبًا ثلاثة أضعاف وزنه. والأهم أن نمط إشارة المستشعر يختلف اعتمادًا على حجم الفاكهة المحتجزة: تسبب الفراولة الصغيرة انثناءً أكبر وبالتالي تغير مقاومة أكبر من عنقود عنب أو برتقالة. من خلال تعيين عتبة بسيطة، يمكن برمجة وحدة التحكم للرفع فقط عندما تظهر «إشارة الفراولة» وإطلاق أي شيء أكبر. يتيح هذا التعرف الأساسي على الأشياء وفرزها دون كاميرات أو خوارزميات معقدة، باستخدام إحساس تشوه الجسم اللين نفسه.
ما يعنيه هذا للآلات الرقيقة في المستقبل
بعبارات يومية، تُظهر هذه الدراسة كيفية بناء يد روبوت لينة وموفرة للطاقة تستطيع أن تشعر بما تفعل، باستخدام مواد أقرب إلى الهلام منها إلى المعدن. من خلال نسج التسخين والاستشعار مباشرة في هلام مائي قابل للطباعة ومرن، يتخطى الفريق عيوبًا طويلة الأمد في المواد المدفوعة بالحرارة والمكونات الصلبة للملاقط اللينة. والنتيجة هي ملقط لين قابل للبرمجة يعمل بجهد منخفض يمكنه رفع عناصر حساسة، وقرر أيها يحتفظ به بناءً على حجمه، والعمل في بيئات حساسة دون تسخينها بشكل مفرط. قد تساعد مثل هذه الروبوتات الحسية اللينة يومًا ما في التعامل الآلي للأغذية، وأتمتة المختبرات، أو الأجهزة الطبية حيث يكون اللمس الآمن والدقيق ضروريًا.
الاستشهاد: Georgopoulou, A., Aguiriano Calvo, M., Lucherini, L. et al. Programmable somatosensory soft robots. npj Flex Electron 10, 58 (2026). https://doi.org/10.1038/s41528-026-00558-0
الكلمات المفتاحية: الروبوتات اللينة, مشغلات هلامية مائية, ملاقط ذكية, مواد مستجيبة, استشعار روبوتي