Clear Sky Science · ja
プログラム可能な体性感覚ソフトロボット
触れたものを感じられるソフトロボット
熟したイチゴを山の中から潰さずにそっと摘み取り、しかもそれが適切な個体であることを知るほどの繊細さを持つロボットハンドを想像してみてください。本論文は、水分を多く含む柔らかな材料から作られ、自身の形状を検出しながら動くことのできる新しいタイプのソフトロボットグリッパーを示します。加熱とセンシング機能を材料そのものに巧妙に組み込むことで、著者らは簡素な電子回路と非常に少ないエネルギーで動作する「体性感覚」的なプログラム可能ソフトロボットを作り上げています。
なぜ繊細な触覚がロボットにとって難しいのか
ロボットは重量物の持ち上げや精密で反復的な作業に優れていますが、果物や医療検体、柔らかい消費財のような壊れやすい対象の扱いは苦手です。従来のソフトグリッパーは駆動や接触検出にポンプやバルブ、かさばるハードウェアを必要とすることが多く、構造が複雑で騒音が出やすく、小型化が難しいという問題があります。別の手法として、環境変化(例えば加熱)に応じて動く“応答性”材料を使う方法があります。代表例としてPNIPAMというハイドロゲルがあり、体温付近を境に低温では水を取り込んで膨張し、高温では収縮します。理論的にはこの膨張・収縮を運動に変換できますが、実際にはPNIPAMを動作させるために周囲全体を加熱する必要があることが多く、その場合は遅く、消費電力が大きく、生体組織のような温度に敏感な環境には適しません。
やわらかなビーズを筋肉と神経に変える
研究者たちはこの課題に対し、「粒状ハイドロゲル(granular hydrogels)」でグリッパーを作るアプローチを採りました。微小な柔らかいゲル粒子を詰め合わせ、それらを化学的に連結して固形化しつつ非常に柔らかい本体を作る方法です。彼らはこの材料を三種類用意します。一つは駆動する筋肉の役割を果たすもので、PNIPAMを基にしており、トリガー温度を超えると強く曲がります。二つ目はセンサーの役割を果たすもので、導電性ポリマーを含み、伸びや曲がりに応じて電気抵抗が変化します。三つ目は塩化亜鉛と導電ポリマーを追加した柔軟なヒーターで、電気が流れるとジュール熱で温まります。これら三種はいずれも類似した柔らかさを共有するため、硬い部分が生じて割れや疲労の原因になることなく層構造として組み合わせられます。チームは、これらの粒状ゲルが従来の同等化学組成のバルクハイドロゲルよりも大きく曲がり、反応が速く、元に戻る挙動がより信頼できることを示しています。
必要な場所だけを温める
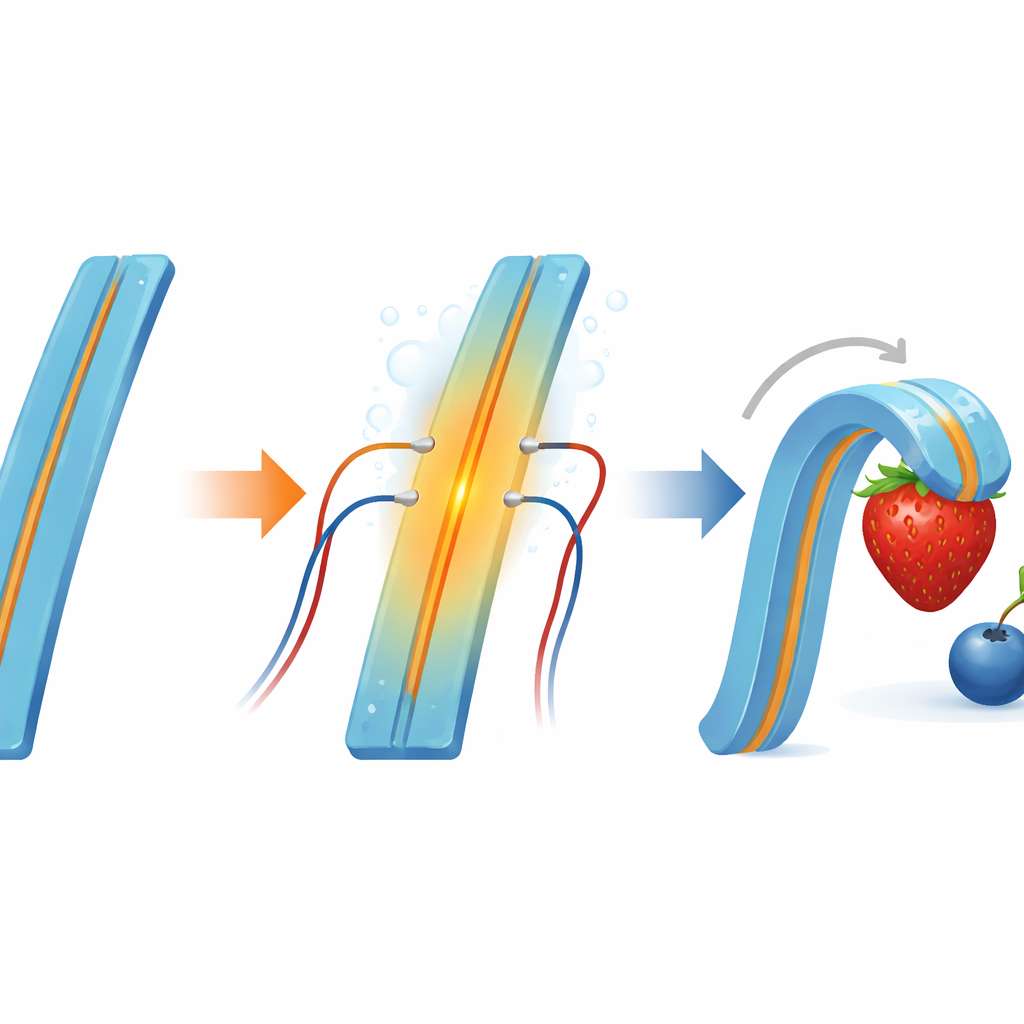
周囲全体を温めるのを避けるため、著者らは加熱材料の細いトラックをグリッパーの曲がる層の内部に直接埋め込みます。わずか5ボルトの印加で、これらのトラックはPNIPAM層を相転移温度まで駆動するのに十分な熱を発生させ、収縮と曲げを引き起こします。詳細な電気計測により、塩化亜鉛由来のイオンと導電性ポリマーの組み合わせがイオン伝導と電子伝導の経路を提供し、電力を局所的な熱に効率良く変換することが示されました。一方で全体の構造はグリッパーの他部分と同じく柔らかく伸縮性を保ちます。重要なのは、デバイスからセンチメートル離れた水はわずかしか温まらず、加熱が主にアクチュエータ自身に局在していることが示された点です。この局所加熱によりエネルギー消費が抑えられ、生体組織や温度に敏感な物品と接触する際の安全性が向上します。
放すタイミングを知るロボットハンドを造形する
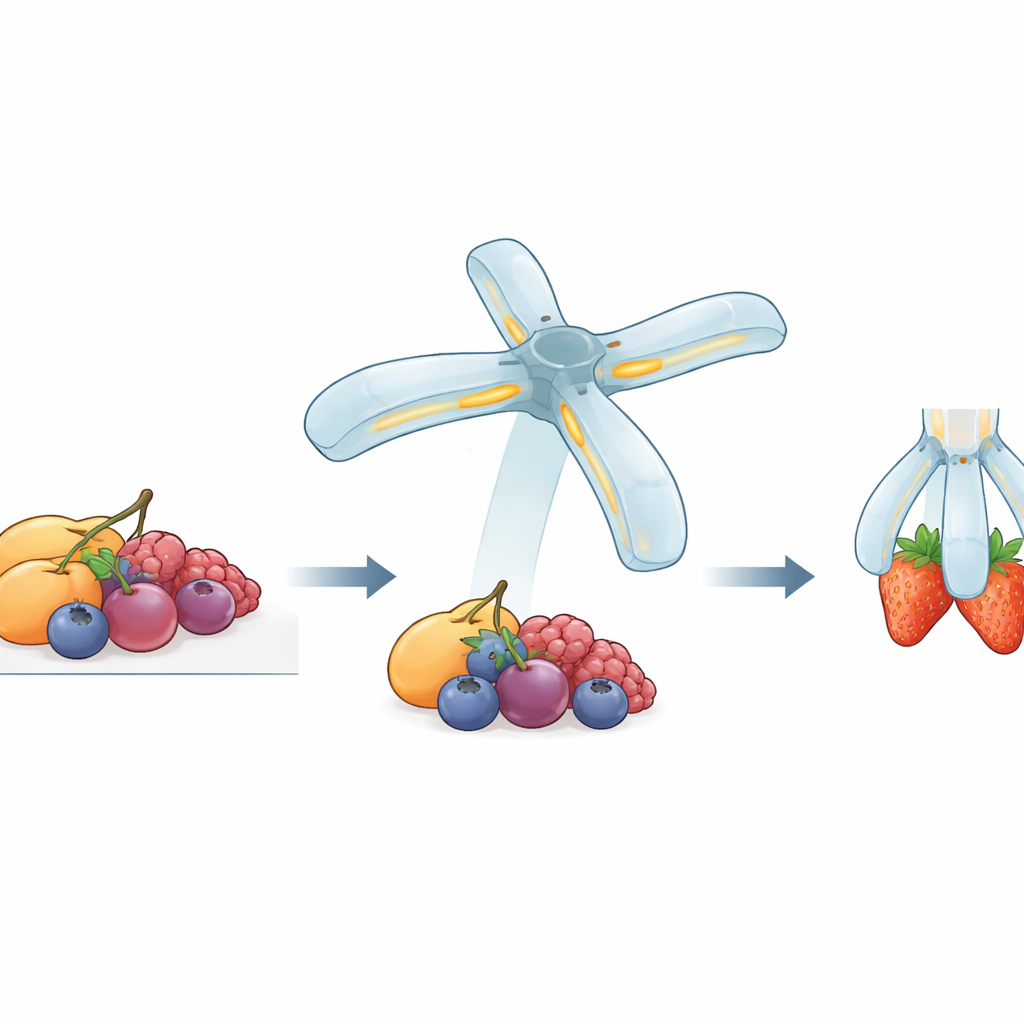
詰まったマイクロゲルインクは圧力下で流動し、すぐに再び固まるため、3Dプリントでカスタム形状に成形できます。著者らは十字形で手のひらサイズのグリッパーを印刷し、各フィンガーには動くPNIPAM層、センシング層、中央の加熱線を備えさせました。印刷パターンと厚みを調整することで、材料を非常に柔らかく保ちながら(ショア硬度10A未満)最大180度の曲げ角を達成し、消費電力も約2ワットに抑えています。組み込まれたセンサー層は指の曲がりや物体との接触を電気抵抗の変化に変換します。単純なコントローラとロボットアームに接続すると、この信号を用いた閉ループ制御が可能になります:グリッパーは加熱して物体に巻き付き、抵抗変化の大きさから適切なサイズの物体を把持したことを判定し、アームに持ち上げや放すタイミングを指示します。
触覚で果物を選別する
この体性感覚能力の実例として、研究者たちはイチゴ、ブドウ、オレンジの混合物でグリッパーを試験しました。約35グラムのグリッパーは自重の約3倍までの物体を持ち上げられます。より重要なのは、保持中のセンサー信号のパターンが保持している果物の大きさによって異なることです:小さなイチゴはより大きな曲がりを引き起こし、それに伴って抵抗変化も大きくなりますが、ブドウの房やオレンジでは変化が小さくなります。単純な閾値を設定することで、コントローラは「イチゴ信号」が出たときだけ持ち上げを続け、より大きなものは放すようにプログラムできます。これにより、カメラや複雑なアルゴリズムを使わずに、柔らかい本体自身の変形感覚だけで基本的な物体認識と選別が可能になります。
今後の繊細な機械にとっての意義
日常的な観点から見ると、本研究はゼリーに近い材料を用いて、何をしているかを感じられる非常に優しくエネルギー効率の高いロボットハンドの作り方を示しています。加熱とセンシングを柔らかく印刷可能なハイドロゲルに織り込むことで、チームは温度駆動材料やかさばるソフトロボットハードウェアの長年の欠点を克服しました。その結果、繊細な物品を持ち上げ、サイズに基づいてどれを保持するかを決め、周囲を過熱させることなく敏感な環境で動作できるプログラム可能な低電圧ソフトグリッパーが実現しました。こうした体性感覚を持つソフトロボットは、将来的に食品の自動取り扱い、ラボの自動化、あるいは安全で慎重な触覚が不可欠な医療機器などで役立つ可能性があります。
引用: Georgopoulou, A., Aguiriano Calvo, M., Lucherini, L. et al. Programmable somatosensory soft robots. npj Flex Electron 10, 58 (2026). https://doi.org/10.1038/s41528-026-00558-0
キーワード: ソフトロボティクス, ハイドロゲルアクチュエータ, スマートグリッパー, 応答性材料, ロボットセンシング