Clear Sky Science · pl
Programowalne somatosensoryczne miękkie roboty
Miękkie roboty, które czują to, czego dotykają
Wyobraź sobie robotyczną dłoń na tyle delikatną, by zerwać dojrzałą truskawkę z pudełka bez zgniatania jej, a jednocześnie na tyle mądrą, by wiedzieć, kiedy trafiła na właściwy owoc. W artykule przedstawiono nowy rodzaj miękkiego chwytaka wykonanego z galaretowatych, wodnistych materiałów, który potrafi zarówno się poruszać, jak i wyczuwać własny kształt — podobnie jak nasza skóra i mięśnie. Dzięki sprytnemu wbudowaniu funkcji grzewczych i sensorycznych bezpośrednio w materiał autorzy tworzą programowalnego „somatosensorycznego” miękkiego robota, działającego przy użyciu prostej elektroniki i niewielkiej ilości energii.
Dlaczego delikatny dotyk jest tak trudny dla robotów
Roboty świetnie radzą sobie z ciężkimi ładunkami i precyzyjnymi, powtarzalnymi zadaniami, ale mają trudności z kruchymi przedmiotami, takimi jak owoce, próbki medyczne czy miękkie towary konsumenckie. Tradycyjne miękkie chwytaki często wymagają pomp, zaworów lub masywnego osprzętu do napędu i wykrywania kontaktu, co czyni je skomplikowanymi, hałaśliwymi i trudnymi do miniaturyzacji. Innym podejściem jest użycie specjalnych materiałów „reaktywnych”, które poruszają się, gdy zmienia się ich otoczenie, na przykład wskutek ogrzewania. Popularnym przykładem jest hydrożel PNIPAM: poniżej około temperatury ciała pęcznieje wodą, powyżej kurczy się. W zasadzie to kurczenie i pęcznienie można zamienić na ruch. W praktyce jednak PNIPAM zwykle trzeba podgrzewać przez ocieplenie całego otoczenia, co jest powolne, energochłonne i nieodpowiednie dla wrażliwych temperaturowo środowisk, takich jak tkanki żywe.
Przekształcanie miękkich kulek w mięśnie i nerwy
Badacze rozwiązują ten problem, budując chwytak z „ziarnistych hydrożeli”: mikroskopijnych miękkich cząstek żelu zagęszczonych razem, a następnie chemicznie połączonych w ciało, które jest stałe, lecz nadal bardzo miękkie. Stworzyli trzy wersje tego materiału. Jedna pełni rolę mięśnia napędowego: oparta na PNIPAM silnie wygina się po przekroczeniu temperatury wyzwalającej. Druga działa jako sensor: zawiera przewodzący polimer, dzięki czemu jej opór elektryczny zmienia się podczas rozciągania lub zginania. Trzecia wersja, otrzymana przez dodanie soli cynku i większej ilości przewodzącego polimeru, pełni rolę elastycznego grzejnika: przepływający prąd ogrzewa ją poprzez efekt Joule’a. Ponieważ wszystkie trzy mają podobną miękkość, można je łączyć w warstwowe struktury bez tworzenia sztywnych miejsc, które pękałyby lub ulegały zmęczeniu. Zespół wykazuje, że te ziarniste żele wyginają się bardziej, reagują szybciej i pewniej wracają do pierwotnego kształtu niż konwencjonalne hydrożele masowe o podobnej chemii.
Ogrzewanie tylko tam, gdzie ma to znaczenie
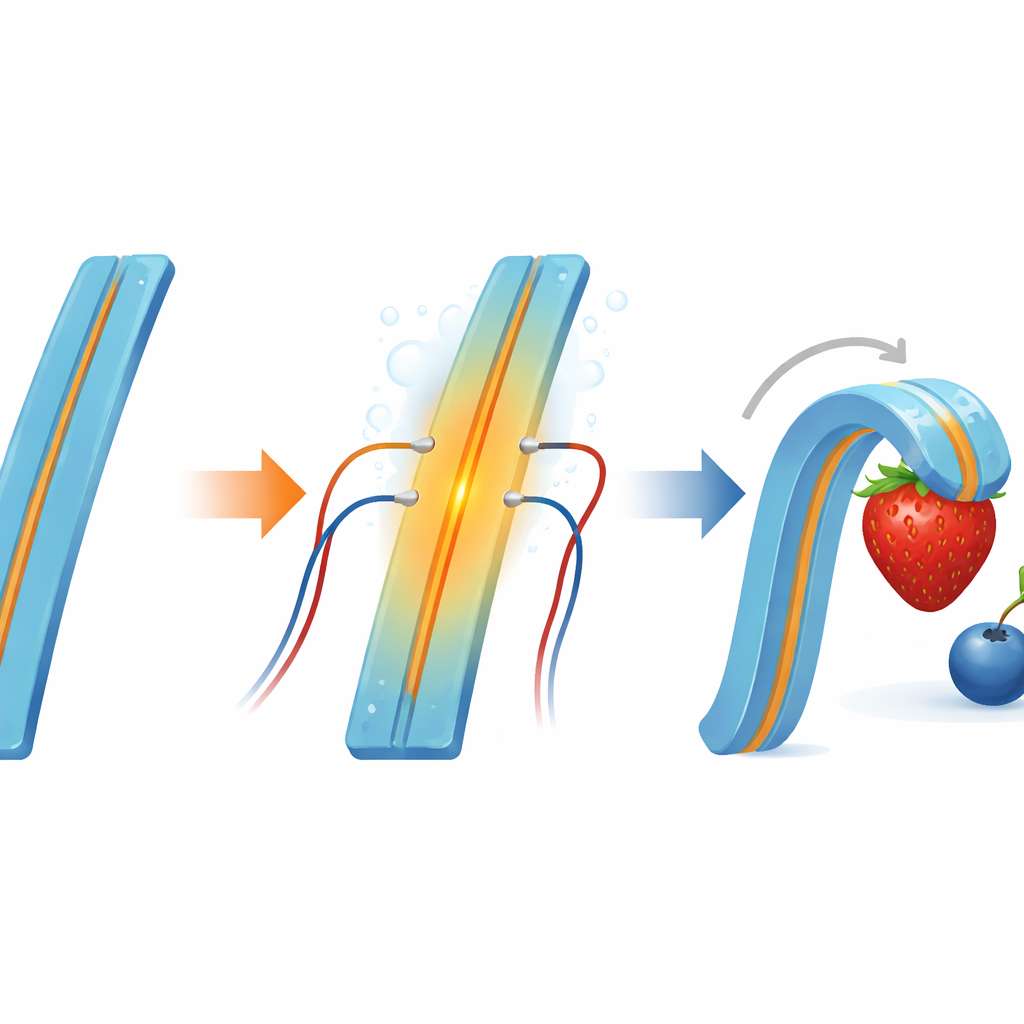
Aby uniknąć ogrzewania całego otoczenia, autorzy osadzają cienkie ścieżki materiału grzewczego bezpośrednio wewnątrz warstwy zginającej chwytaka. Przy zastosowaniu tylko 5 woltów te ścieżki nagrzewają się na tyle, by przesunąć warstwę PNIPAM przez jej temperaturę przejścia, powodując jej skurcz i zgięcie. Dokładne pomiary elektryczne wykazują, że kombinacja jonów z chlorku cynku i przewodzącego polimeru tworzy zarówno jonowe, jak i elektroniczne ścieżki, które efektywnie przetwarzają energię elektryczną na lokalne ciepło, podczas gdy cała struktura pozostaje równie miękka i rozciągliwa jak reszta chwytaka. Co istotne, woda oddalona o zaledwie centymetr od urządzenia nagrzewa się tylko nieznacznie, co pokazuje, że ciepło jest skoncentrowane głównie w samym aktuatorze. Takie ukierunkowane ogrzewanie ogranicza zużycie energii i czyni system bezpieczniejszym przy kontakcie z tkankami biologicznymi lub towarami wrażliwymi na temperaturę.
Drukowanie dłoni robota, która wie, kiedy puścić
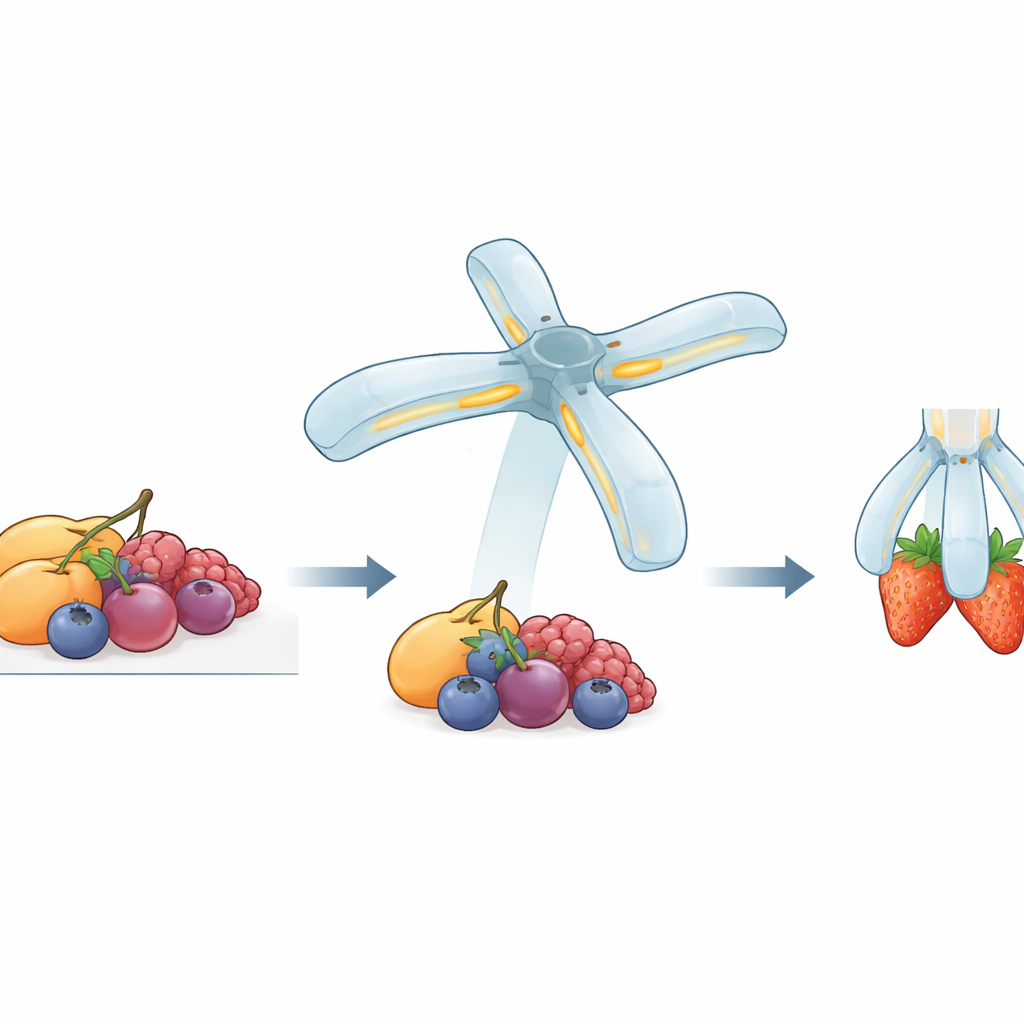
Dzięki temu, że tusze z zagęszczonych mikrożeli płyną pod ciśnieniem, lecz szybko ponownie zestalają się, można je drukować 3D w niestandardowe kształty. Autorzy wydrukowali chwytak o kształcie krzyża wielkości dłoni, którego każdy palec zawiera warstwę napędową z PNIPAM, warstwę sensoryczną oraz centralną linię grzewczą. Dostosowując wzory druku i grubości, osiągnęli kąty zgięcia do 180 stopni, zachowując jednocześnie niezwykłą miękkość materiału (twardość Shore poniżej 10 A) i zużycie mocy w okolicach 2 watów. Wbudowana warstwa sensoryczna przekształca zginanie palca i kontakt z obiektem w zmianę oporu elektrycznego. Podłączony do prostego sterownika i ramienia robota, sygnał ten służy do sterowania w pętli zamkniętej: chwytak się nagrzewa, owija wokół przedmiotu, rozpoznaje, kiedy złapał coś o odpowiednim rozmiarze na podstawie wielkości zmiany oporu, a następnie sygnalizuje ramieniu, kiedy podnieść lub puścić.
Sortowanie owoców z poczuciem dotyku
Aby zademonstrować, co potrafi ta somatosensoryczna zdolność, badacze przetestowali chwytak na mieszance truskawek, winogron i pomarańczy. Chwytak ważący około 35 gramów potrafi podnieść przedmioty do około trzykrotności własnej masy. Co ważniejsze, wzór sygnału z czujnika różni się w zależności od rozmiaru trzymanego owocu: małe truskawki powodują większe zgięcie i w konsekwencji większą zmianę oporu niż kiść winogron czy pomarańcza. Ustawiając prosty próg, sterownik można zaprogramować tak, by podnosił tylko wtedy, gdy pojawi się „sygnał truskawki”, a puszczał wszystko, co większe. Pozwala to na podstawową identyfikację i sortowanie obiektów bez kamer czy złożonych algorytmów, wykorzystując tylko wewnętrzne wyczucie odkształcenia miękkiego ciała.
Co to oznacza dla przyszłych delikatnych maszyn
Mówiąc prościej, praca ta pokazuje, jak zbudować bardzo delikatną, energooszczędną robotyczną dłoń, która potrafi wyczuć, co robi, używając materiałów bliższych galaretce niż metalowi. Poprzez integrację ogrzewania i czujników bezpośrednio w miękkim, drukowalnym hydrożelu, zespół pokonuje długoletnie ograniczenia materiałów napędzanych temperaturą i masywnego osprzętu w robotyce miękkiej. Efektem jest programowalny, niskonapięciowy miękki chwytak zdolny do podnoszenia delikatnych przedmiotów, decydowania, które z nich zatrzymać na podstawie rozmiaru, oraz pracy w wrażliwych środowiskach bez ich przegrzewania. Takie somatosensoryczne miękkie roboty mogłyby pewnego dnia pomóc w automatycznym przetwarzaniu żywności, automatyzacji laboratoriów czy urządzeniach medycznych, gdzie bezpieczny i ostrożny dotyk jest niezbędny.
Cytowanie: Georgopoulou, A., Aguiriano Calvo, M., Lucherini, L. et al. Programmable somatosensory soft robots. npj Flex Electron 10, 58 (2026). https://doi.org/10.1038/s41528-026-00558-0
Słowa kluczowe: robotyka miękka, aktuatory hydrożelowe, inteligentne chwytaki, materiały reaktywne, robotyczne czujniki