Clear Sky Science · tr
Programlanabilir somatosensör yumuşak robotlar
Dokunduğunu hissedebilen yumuşak robotlar
Çilekleri ezmeden bir meyve yığını içinden olgun bir tanesini nazikçe alabilecek ve doğru taneyi tuttuğunu anlayacak kadar akıllı bir robot el hayal edin. Bu makale, derimiz ve kaslarımız gibi hem hareket edebilen hem de kendi biçimini hissedebilen, su içerikli yumuşak malzemelerden yapılmış yeni bir tür yumuşak robotik kavrayıcı sunuyor. Isıtma ve algılama işlevlerini malzemenin içine akıllıca gömerek, yazarlar basit elektronikle ve çok az enerjiyle çalışan programlanabilir bir "somatosensör" yumuşak robot yaratıyor.
Neden hassas dokunuş robotlar için zor
Robotlar ağır kaldırma ve hassas, tekrarlı görevlerde çok başarılı hale geldi, ancak meyve, tıbbi numuneler veya yumuşak tüketim malları gibi kırılgan nesnelerle uğraşmakta zorlanıyorlar. Geleneksel yumuşak kavrayıcılar genellikle hareket ve temas algısı için pompalar, valfler veya hantal donanım gerektirir; bu da onları karmaşık, gürültülü ve miniaturize edilmesi zor yapar. Diğer bir yaklaşım, ortam değiştiğinde (örneğin ısıtıldığında) hareket eden özel "uyaranyanıt veren" malzemeleri kullanmaktır. Yaygın bir örnek PNIPAM adlı bir hidrojel: vücut sıcaklığının altında suyla şişer, üzerinde ise büzülür. Teoride bu büzülme ve şişme harekete dönüştürülebilir. Ancak pratikte PNIPAM genellikle bütün çevrenin ısıtılmasını gerektirir; bu yavaş, enerji yoğun ve canlı doku gibi sıcaklığa duyarlı ortamlara uygun değildir.
Yumuşak boncukları kaslara ve sinirlere dönüştürmek
Araştırmacılar bu zorluğu, kavrayıcılarını "granüler hidrojel"lerden inşa ederek ele alıyorlar: birbirine sıkışmış ve sonra kimyasal olarak birbirine bağlanmış, yine de çok yumuşak bir gövde oluşturan küçük yumuşak jel parçacıkları. Bu malzemeden üç versiyon oluşturuyorlar. Birinci versiyon hareket eden kasa benziyor: PNIPAM bazlı ve tetik sıcaklığının üzerine çıktığında güçlü şekilde bükülüyor. İkinci versiyon sensör görevi görüyor: iletken bir polimer içeriyor, böylece gerildiğinde veya büküldüğünde elektriksel direnci değişiyor. Üçüncü versiyon ise çinko tuzu ve daha fazla iletken polimer eklenerek üretilen esnek bir ısıtıcı olarak işlev görüyor: elektrik geçtiğinde Joule ısıtmasıyla ısınır. Üçü de benzer yumuşaklığa sahip olduğu için sertleşecek veya çatlayacak noktalar oluşturmadan katmanlı yapılarda birleştirilebiliyor. Ekip, bu granüler jellerin benzer kimyadaki geleneksel kitlesel hidrojelere kıyasla daha fazla büküldüğünü, daha hızlı yanıt verdiğini ve daha güvenilir şekilde eski haline döndüğünü gösteriyor.
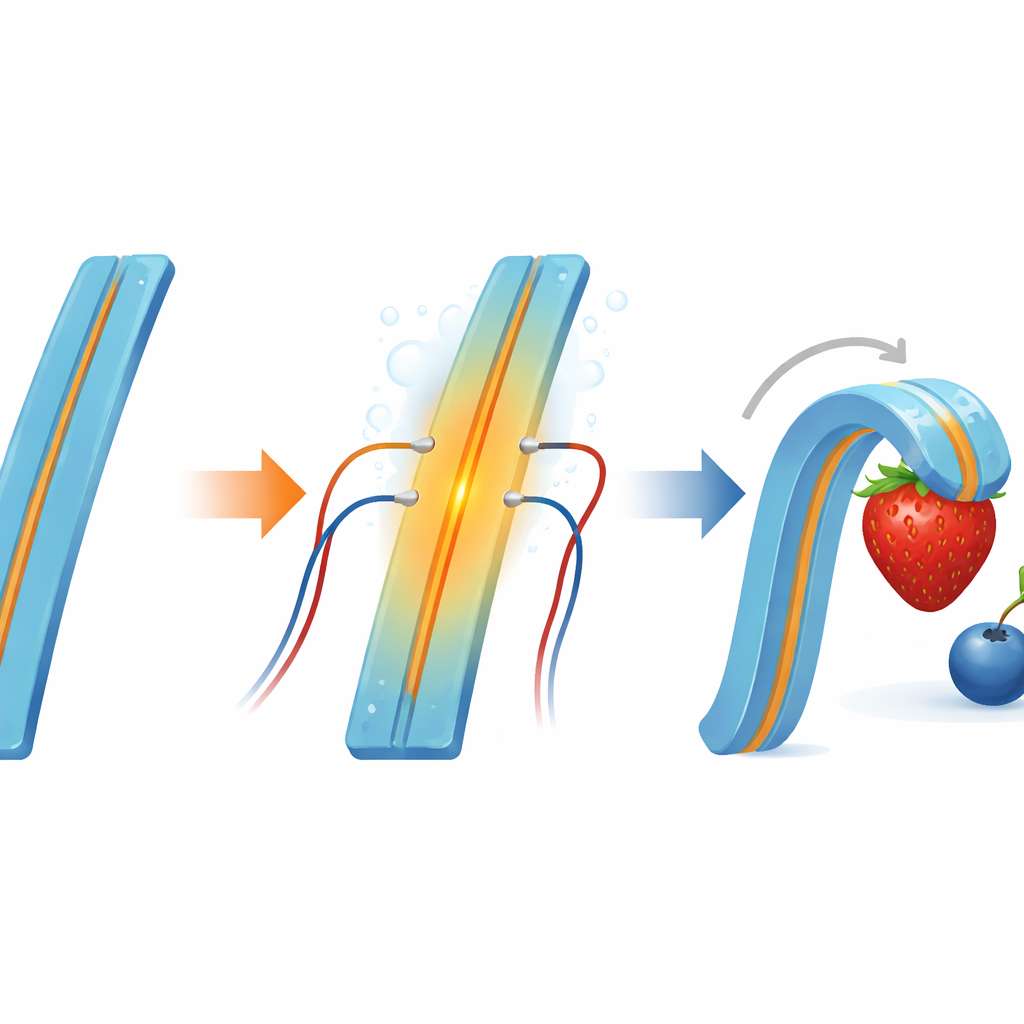
Sadece gerektiği yerde ısıtma
Tüm çevreyi ısıtmaktan kaçınmak için yazarlar ısıtma malzemesinin ince izlerini kavrayıcının bükülen katmanının içine doğrudan gömüyorlar. Sadece 5 volt uygulandığında bu izler PNIPAM katmanını geçiş sıcaklığına getirecek kadar ısınarak onun büzülmesine ve bükülmesine neden oluyor. Titiz elektriksel ölçümler, çinko klorür iyonları ile iletken polimerin kombinasyonunun hem iyonik hem elektronik yollar yaratarak elektrik gücünü yerel ısıya verimli şekilde dönüştürdüğünü; aynı zamanda genel yapının kavrayıcının geri kalanı kadar yumuşak ve esnek kaldığını ortaya koyuyor. Kritik olarak, cihazdan bir santimetre uzaklıktaki su sadece hafifçe ısınıyor; bu da ısının büyük ölçüde aktuatörde sınırlı kaldığını gösteriyor. Bu hedeflenmiş ısıtma enerji kullanımını azaltıyor ve biyolojik dokularla veya sıcaklığa duyarlı ürünlerle temas için sistemi daha güvenli hale getiriyor.
Ne zaman bırakacağını bilen bir robot el yazdırmak
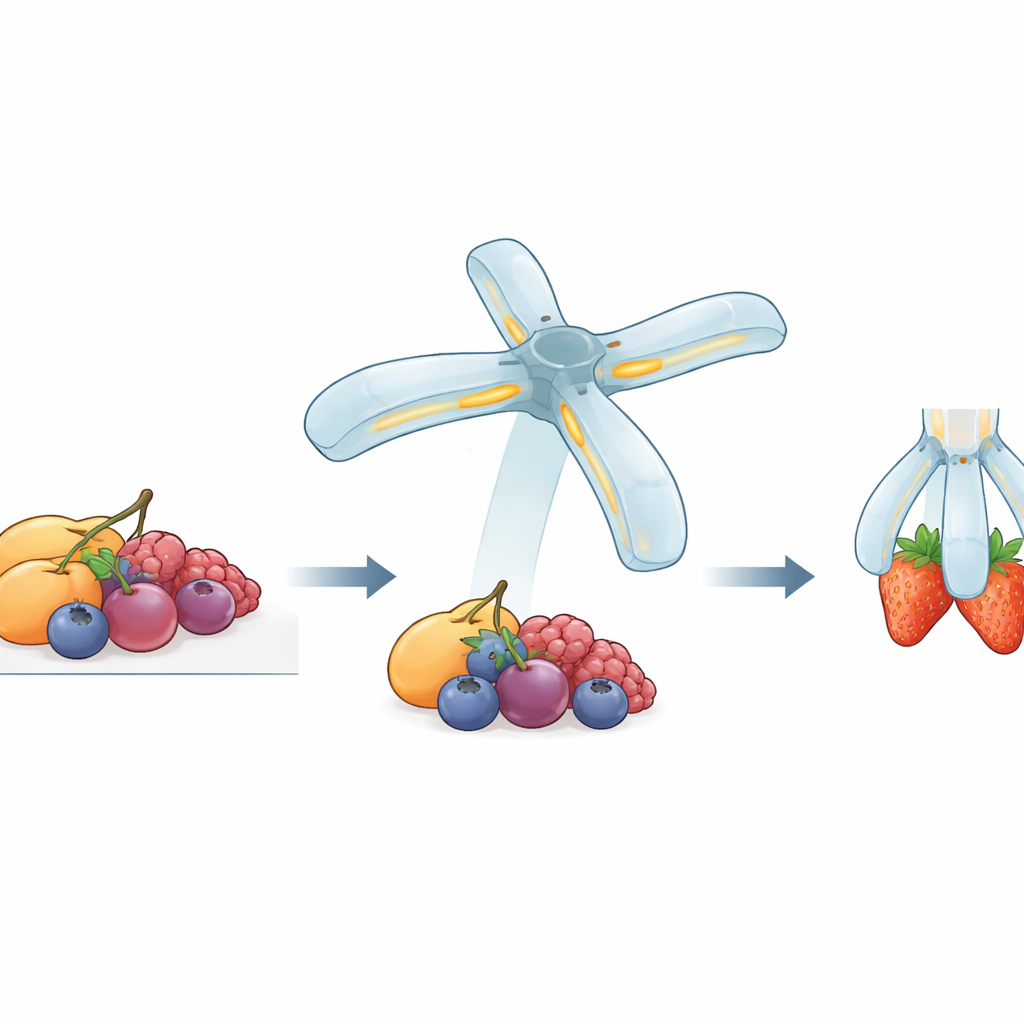
Sıkışmış mikrojel mürekkepleri basınç altında akıp hızla tekrar katılaşabildiği için özel şekillere 3B yazdırılabiliyorlar. Yazarlar, parmaklarının her biri hareket eden bir PNIPAM katmanı, bir algılama katmanı ve merkezi bir ısıtma hattı içeren, avuç içi boyutunda bir artı şeklinde kavrayıcı yazdırıyorlar. Baskı desenlerini ve kalınlıkları ayarlayarak malzemenin son derece yumuşak (Shore sertliği 10 A’nın altında) kalmasını sağlarken 180 dereceye kadar bükülme açılarına ve yaklaşık 2 watt civarında güç tüketimine ulaşıyorlar. Dahili sensör katmanı, parmak bükülmesini ve bir nesne ile teması elektriksel direnç değişimine çeviriyor. Basit bir kontrolöre ve bir robot koluna bağlandığında bu sinyal kapalı döngü kontrol için kullanılıyor: kavrayıcı ısınıyor, bir nesnenin etrafına sarılıyor, doğru boyuttaki bir şeyi tuttuğunu direnç değişiminin büyüklüğüne bakarak tanıyor ve sonra kolu ne zaman kaldırıp ne zaman bırakması gerektiğini bildiriyor.
Dokunma duyusuyla meyve ayırma
Bu somatosensör yeteneğinin neler yapabileceğini göstermek için araştırmacılar kavrayıcıyı çilek, üzüm ve portakallerin karışımında test ediyorlar. Yaklaşık 35 gram ağırlığındaki bir kavrayıcı kendi ağırlığının üç katına kadar nesneleri kaldırabiliyor. Daha da önemlisi, tutulan meyvenin boyutuna bağlı olarak sensör sinyalinin deseni farklılaşıyor: küçük çilekler daha büyük bir bükülmeye ve dolayısıyla üzüm salkımı veya portakala göre daha büyük bir direnç değişimine neden oluyor. Basit bir eşik belirleyerek kontrolör yalnızca "çilek sinyali" ortaya çıktığında kaldırmayı sürmek ve daha büyük olanları serbest bırakmak üzere programlanabiliyor. Bu, karmaşık algoritmalar veya kameralar olmadan, yalnızca yumuşak gövdenin kendi deformasyon duygusunu kullanarak temel nesne tanıma ve ayırma sağlıyor.
Gelecekteki nazik makineler için ne anlama geliyor
Günlük terimlerle, bu çalışma jelden metalden daha yakın malzemeler kullanarak ne yaptığını hissedebilen, çok nazik ve enerji verimli bir robot el inşa etmenin yollarını gösteriyor. Isıtma ve algılama işlevlerini yumuşak, yazdırılabilir bir hidrojelin içine örerek ekip, sıcaklıkla çalışan malzemelerin ve hacimli yumuşak robot donanımının uzun süredir devam eden sakıncalarının üstesinden geliyor. Ortaya çıkan, programlanabilir, düşük voltajlı yumuşak kavrayıcı; hassas öğeleri kaldırabiliyor, bunların hangilerini boyutlarına göre tutacağına karar verebiliyor ve çevreyi aşırı ısıtmadan hassas ortamlarda çalışabiliyor. Bu tür somatosensör yumuşak robotlar bir gün otomatik gıda işleme, laboratuvar otomasyonu veya güvenli, dikkatli dokunuşun elzem olduğu tıbbi cihazlarda yardımcı olabilir.
Atıf: Georgopoulou, A., Aguiriano Calvo, M., Lucherini, L. et al. Programmable somatosensory soft robots. npj Flex Electron 10, 58 (2026). https://doi.org/10.1038/s41528-026-00558-0
Anahtar kelimeler: yumuşak robotik, hidrojel aktüatörleri, akıllı kavrayıcılar, uyaranyanıt veren malzemeler, robotik algılama