Clear Sky Science · es
Robots blandos somatosensoriales programables
Robots blandos que pueden sentir lo que tocan
Imagínese una mano robótica lo bastante delicada como para coger una fresa madura de un montón de fruta sin aplastarla, y lo bastante inteligente como para reconocer cuándo ha elegido la adecuada. Este artículo presenta un nuevo tipo de pinza blanda robótica hecha de materiales esponjosos y ricos en agua que pueden moverse y al mismo tiempo detectar su propia forma, de manera similar a nuestra piel y músculos. Al incorporar de forma ingeniosa funciones de calentamiento y detección directamente en el material, los autores crean un robot blando “somatosensorial” programable que funciona con electrónica simple y muy poca energía.
Por qué el tacto delicado es tan difícil para los robots
Los robots han alcanzado un gran nivel en levantamiento pesado y tareas repetitivas y precisas, pero aún tienen problemas con objetos frágiles como fruta, muestras médicas o bienes blandos de consumo. Las pinzas blandas tradicionales suelen necesitar bombas, válvulas o hardware voluminoso para moverse y para detectar el contacto, lo que las hace complejas, ruidosas y difíciles de miniaturizar. Otra vía es usar materiales “responsivos” que se mueven cuando cambia su entorno, por ejemplo con el calor. Un ejemplo conocido es el hidrogel llamado PNIPAM: por debajo de cierta temperatura cercana a la corporal se hincha con agua y por encima se contrae. En principio, ese hinchado y contracción pueden convertirse en movimiento. En la práctica, sin embargo, el PNIPAM suele requerir calentar todo el entorno, lo que es lento, consumidor de energía e inadecuado para entornos sensibles a la temperatura, como tejidos vivos.
Convertir perlas blandas en músculos y nervios
Los investigadores abordan este reto construyendo su pinza a partir de “hidrogeles granulares”: pequeñas partículas de gel blando compactadas y luego enlazadas químicamente en un cuerpo sólido pero aún muy blando. Crean tres versiones de este material. Una versión actúa como músculo móvil: se basa en PNIPAM y se dobla con fuerza cuando se calienta por encima de su temperatura de activación. Una segunda versión funciona como sensor: contiene un polímero conductor de modo que su resistencia eléctrica cambia al estirarse o doblarse. Una tercera versión, obtenida añadiendo sal de zinc y más polímero conductor, actúa como calentador flexible: cuando pasa electricidad por ella se calienta por efecto Joule. Como las tres comparten una suavidad parecida, se pueden combinar en estructuras en capas sin crear zonas rígidas que se agrieten o fatiguen. El equipo demuestra que estos geles granulares se doblan más, responden más rápido y vuelven a su forma con más fiabilidad que los hidrogeles macizos convencionales de química similar.
Calentar solo donde importa
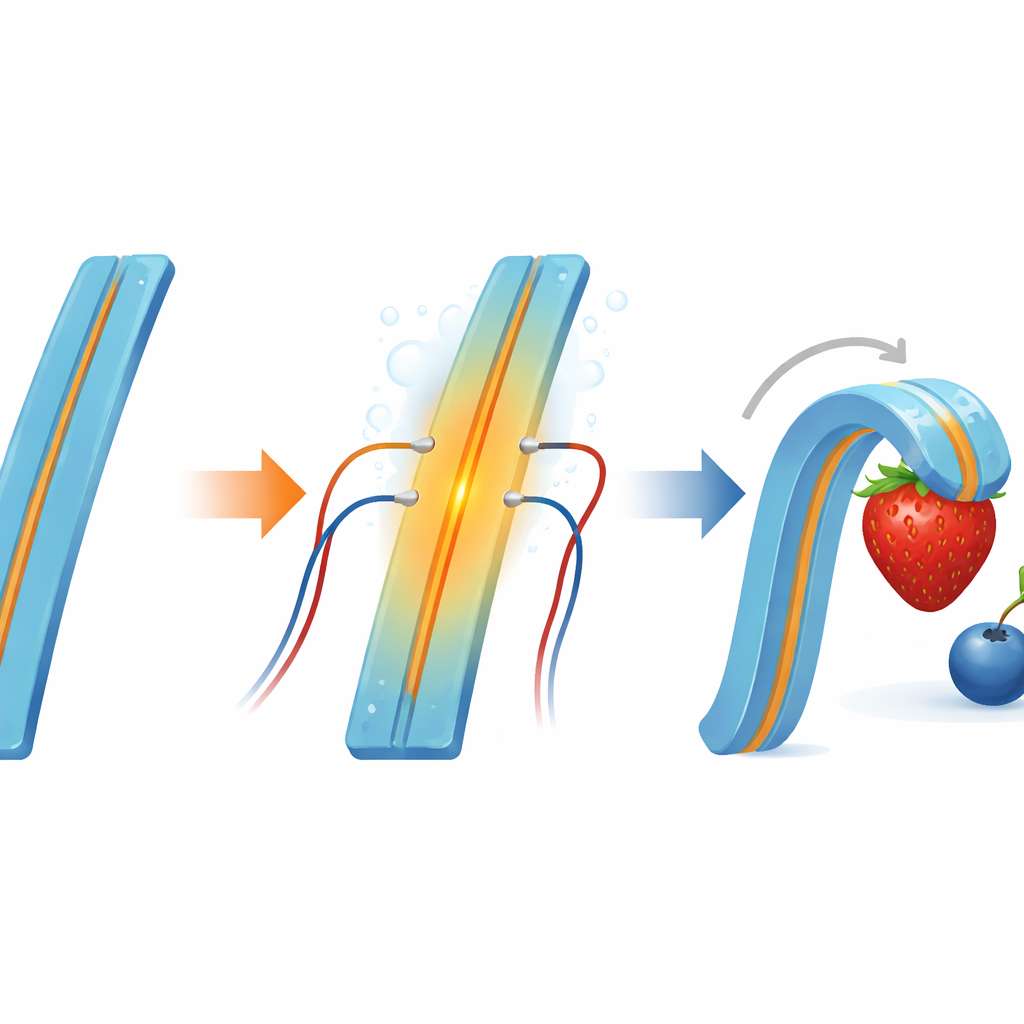
Para evitar calentar todo el entorno, los autores incrustan finas trazas del material calefactor directamente dentro de la capa que se dobla de la pinza. Con solo 5 voltios aplicados, esas trazas se calientan lo suficiente para llevar la capa de PNIPAM a través de su temperatura de transición, provocando su contracción y el plegado. Mediciones eléctricas cuidadosas revelan que la combinación de iones del cloruro de zinc y el polímero conductor crea vías tanto iónicas como electrónicas que convierten de forma eficiente la energía eléctrica en calor local, mientras que la estructura global sigue siendo tan blanda y elástica como el resto de la pinza. De manera crucial, el agua situada a apenas un centímetro del dispositivo se calienta sólo ligeramente, mostrando que el calor queda confinado mayoritariamente al propio actuador. Este calentamiento dirigido reduce el consumo energético y hace el sistema más seguro para el contacto con tejidos biológicos o productos sensibles a la temperatura.
Imprimir una mano robótica que sabe cuándo soltar
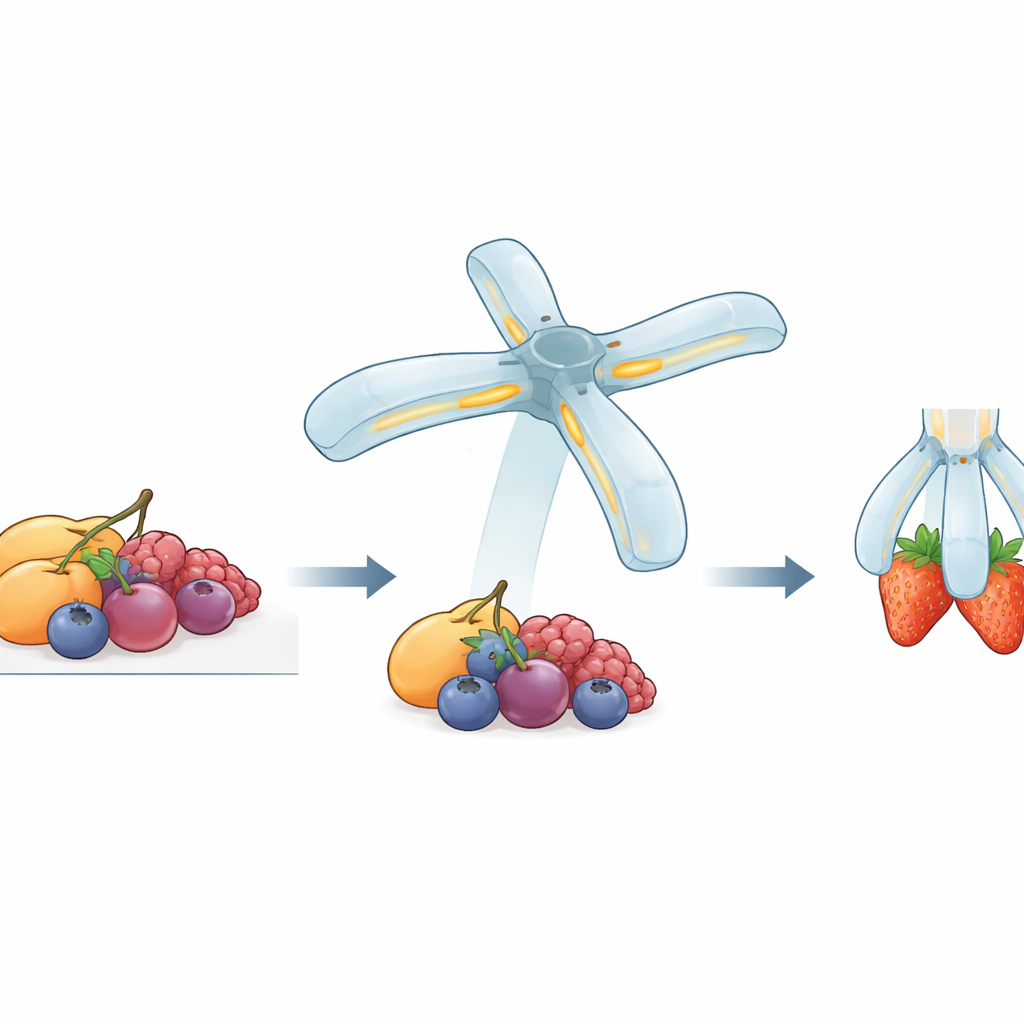
Puesto que las tintas de microgel compactado fluyen bajo presión pero se solidifican rápidamente, pueden imprimirse en 3D para obtener formas personalizadas. Los autores imprimen una pinza en forma de cruz, del tamaño de la palma, cuyos dedos contienen cada uno una capa móvil de PNIPAM, una capa sensora y una línea calefactora central. Ajustando los patrones de impresión y el espesor, alcanzan ángulos de plegado de hasta 180 grados manteniendo el material extremadamente blando (dureza Shore por debajo de 10 A) y un consumo energético en torno a 2 vatios. La capa sensora integrada convierte el doblado del dedo y el contacto con un objeto en un cambio de resistencia eléctrica. Conectada a un controlador sencillo y a un brazo robótico, esta señal se usa para control en lazo cerrado: la pinza se calienta, se enrosca alrededor de un objeto, reconoce cuándo ha atrapado algo del tamaño correcto por la magnitud del cambio de resistencia y luego indica al brazo cuándo levantar o soltar.
Clasificar fruta con sentido del tacto
Para demostrar lo que puede hacer esta capacidad somatosensorial, los investigadores prueban la pinza con una mezcla de fresas, uvas y naranjas. Una pinza que pesa unos 35 gramos puede levantar objetos de hasta aproximadamente tres veces su propio peso. Más importante aún, el patrón de la señal del sensor difiere según el tamaño de la fruta que se sujeta: las fresas pequeñas provocan un mayor doblado y, por tanto, un cambio de resistencia mayor que un racimo de uvas o una naranja. Ajustando un umbral simple, el controlador puede programarse para seguir levantando solo cuando aparece la “señal de fresa” y soltar cualquier cosa más grande. Esto permite un reconocimiento y clasificación básicos de objetos sin cámaras ni algoritmos complejos, usando únicamente la propia sensación de deformación del cuerpo blando.
Qué significa esto para futuras máquinas delicadas
En términos cotidianos, este trabajo muestra cómo construir una mano robótica muy delicada y eficiente en energía que puede sentir lo que hace, usando materiales más parecidos a la gelatina que al metal. Al entrelazar calefacción y sensado directamente en un hidrogel blando e imprimible, el equipo supera las limitaciones de larga data de los materiales activados por temperatura y del hardware voluminoso de la robótica blanda. El resultado es una pinza blanda programable y de bajo voltaje capaz de levantar objetos delicados, decidir cuáles conservar en función de su tamaño y operar en entornos sensibles sin sobrecalentarlos. Tales robots blandos somatosensoriales podrían en el futuro ayudar en el manejo automatizado de alimentos, la automatización de laboratorios o dispositivos médicos donde el tacto seguro y cuidadoso es esencial.
Cita: Georgopoulou, A., Aguiriano Calvo, M., Lucherini, L. et al. Programmable somatosensory soft robots. npj Flex Electron 10, 58 (2026). https://doi.org/10.1038/s41528-026-00558-0
Palabras clave: robótica blanda, actuadores de hidrogel, pinzas inteligentes, materiales sensibles, sensado robótico