Clear Sky Science · de
Programmierbare somatosensorische Weichroboter
Weichroboter, die spüren, was sie berühren
Stellen Sie sich eine Roboterhand vor, die sanft genug ist, eine reife Erdbeere aus einer Obstschale zu pflücken, ohne sie zu zerdrücken, und clever genug, zu erkennen, ob sie die richtige gefunden hat. Dieses Papier stellt eine neue Art von weichem Robotergreifer vor, hergestellt aus weichen, wasserreichen Materialien, die sich sowohl bewegen als auch ihre eigene Form wahrnehmen können — ähnlich wie unsere Haut und Muskeln. Indem Heizelemente und Sensorik direkt in das Material integriert werden, schaffen die Autoren einen programmierbaren „somatosensorischen“ Weichroboter, der mit einfacher Elektronik und sehr geringem Energieaufwand funktioniert.
Warum feinfühliges Tasten für Roboter so schwierig ist
Roboter sind hervorragend im schweren Heben und in präzisen, wiederholbaren Aufgaben, tun sich aber schwer mit zerbrechlichen Objekten wie Obst, medizinischen Proben oder weichen Konsumgütern. Traditionelle weiche Greifer benötigen oft Pumpen, Ventile oder sperrige Hardware, um sich zu bewegen und Kontakt zu erkennen, was sie komplex, laut und schwer miniaturisierbar macht. Ein anderer Ansatz verwendet spezielle „reaktive“ Materialien, die sich bei Umweltänderungen bewegen, etwa bei Erwärmung. Ein bekanntes Beispiel ist das Hydrogel PNIPAM: unter etwa Körpertemperatur quillt es mit Wasser auf, darüber zieht es sich zusammen. Prinzipiell lässt sich dieses Quellen und Schrumpfen in Bewegung umsetzen. In der Praxis muss PNIPAM aber meist über Erwärmung der gesamten Umgebung aktiviert werden, was langsam, energieintensiv und ungeeignet für temperaturempfindliche Umgebungen wie lebendes Gewebe ist.
Weiche Perlen zu Muskeln und Nerven machen
Die Forschenden gehen dieses Problem an, indem sie ihren Greifer aus „granularen Hydrogelen“ bauen: winzige weiche Gelpartikel, die zusammengepresst und chemisch vernetzt werden zu einem festen, aber weiterhin sehr weichen Körper. Sie stellen drei Varianten dieses Materials her. Eine Version fungiert als bewegender Muskel: Sie basiert auf PNIPAM und biegt sich stark, wenn sie über ihre Schwelltemperatur erwärmt wird. Eine zweite Version dient als Sensor: Sie enthält ein leitfähiges Polymer, sodass sich ihr elektrischer Widerstand bei Dehnung oder Biegung ändert. Eine dritte Version, hergestellt durch Zugabe von Zinksalz und mehr leitfähigem Polymer, wirkt als flexibler Heizer: Wenn Strom hindurchfließt, erwärmt sie sich durch Joulesche Wärme. Da alle drei Varianten ähnliche Weichheit besitzen, lassen sie sich zu geschichteten Strukturen kombinieren, ohne harte Stellen zu erzeugen, die reißen oder ermüden würden. Das Team zeigt, dass diese granularen Gele stärker biegen, schneller reagieren und sich zuverlässiger zurückentspannen als herkömmliche Bulk-Hydrogele mit ähnlicher Chemie.
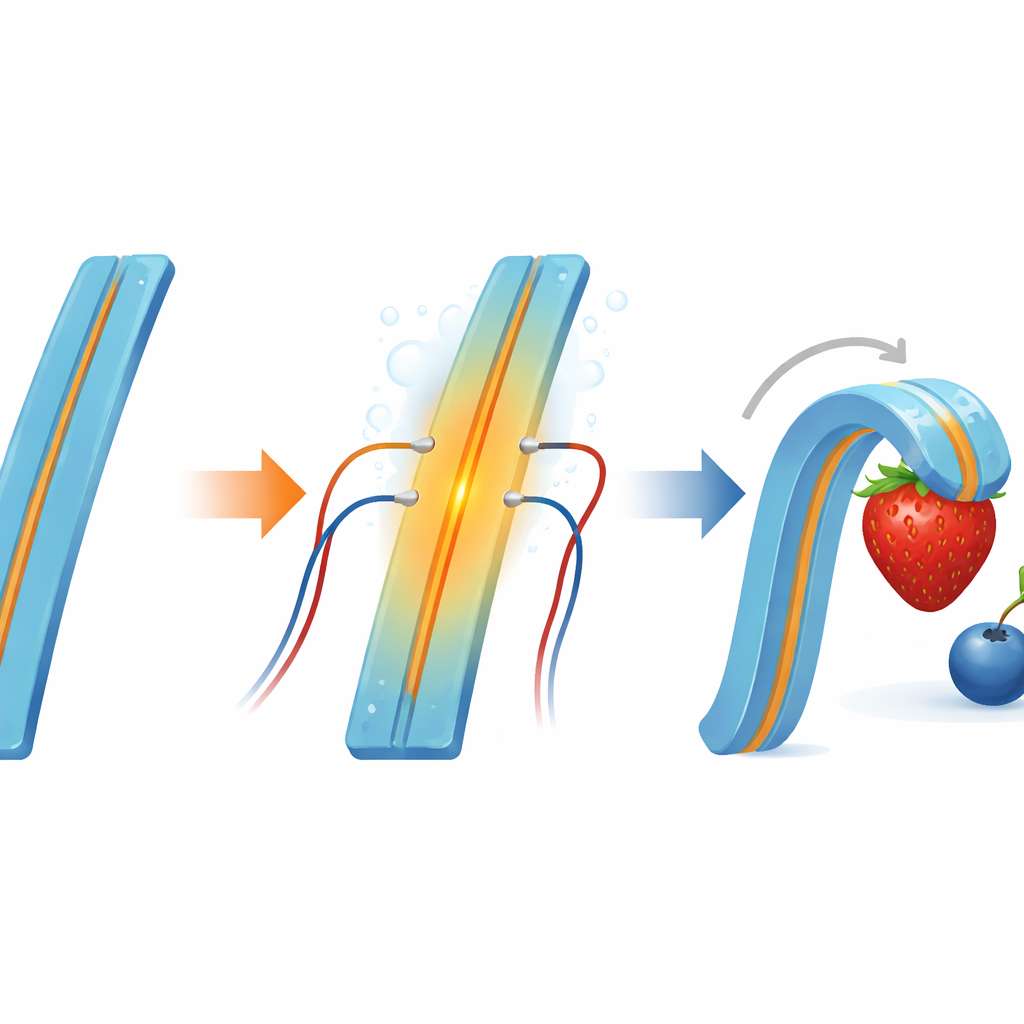
Nur dort heizen, wo es zählt
Um zu vermeiden, die gesamte Umgebung zu erwärmen, betten die Autoren dünne Bahnen des Heizmaterials direkt in die Biegeschicht des Greifers ein. Wenn nur 5 Volt angelegt werden, erhitzen sich diese Bahnen gerade so stark, dass die PNIPAM-Schicht ihre Übergangstemperatur überschreitet, sich zusammenzieht und sich krümmt. Sorgfältige elektrische Messungen zeigen, dass die Kombination aus Ionen des Zinkchlorids und dem leitfähigen Polymer sowohl ionische als auch elektronische Leitungswege schafft, die elektrische Energie effizient in lokale Wärme umwandeln, während die Gesamtstruktur so weich und dehnbar bleibt wie der Rest des Greifers. Entscheidend ist, dass sich das Wasser nur einen Zentimeter entfernt vom Gerät kaum erwärmt, was zeigt, dass die Wärme überwiegend auf den Aktuator beschränkt bleibt. Diese gezielte Erwärmung reduziert den Energiebedarf und macht das System sicherer für den Kontakt mit biologischem Gewebe oder temperaturempfindlichen Gütern.
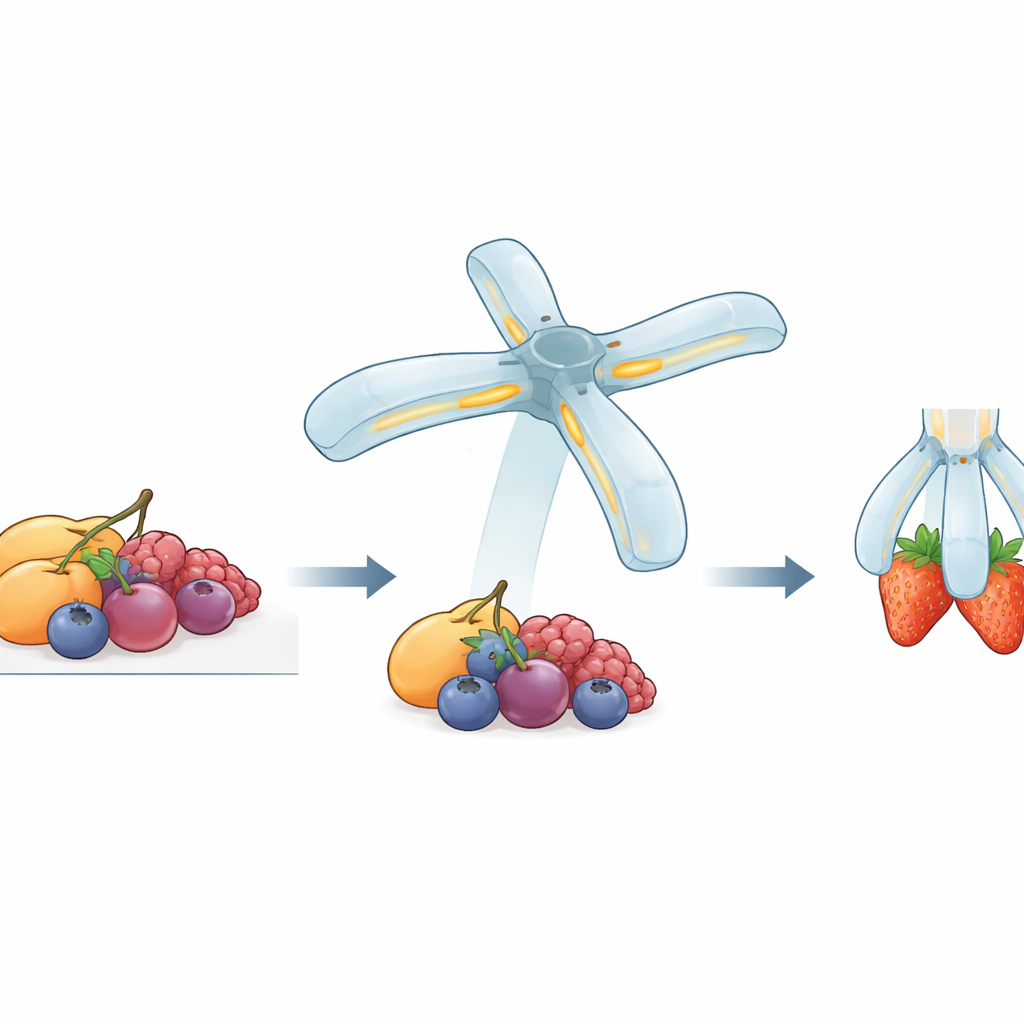
Einen Roboterhand drucken, die weiß, wann sie loslassen muss
Da die verdichteten Mikrogel‑Drucktinten unter Druck fließen, aber schnell wieder verfestigen, lassen sie sich per 3D-Druck in kundenspezifische Formen bringen. Die Autoren drucken einen kreuzförmigen, handtellergroßen Greifer, dessen Finger jeweils eine bewegliche PNIPAM‑Schicht, eine Sensorsschicht und eine zentrale Heizlinie enthalten. Durch Abstimmen von Druckmustern und Schichtdicken erreichen sie Biegewinkel von bis zu 180 Grad, während das Material extrem weich bleibt (Shore‑Härte unter 10 A) und der Energieverbrauch bei etwa 2 Watt liegt. Die eingebaute Sensorschicht wandelt Fingerbiegung und Kontakt mit einem Objekt in eine Veränderung des elektrischen Widerstands um. Verbunden mit einem einfachen Controller und einem Roboterarm wird dieses Signal für Regelkreise genutzt: Der Greifer erhitzt, krümmt sich um ein Objekt, erkennt anhand der Größe der Widerstandsänderung, ob er etwas in der richtigen Größe erfasst hat, und gibt dem Arm dann das Signal zum Heben oder Loslassen.
Obst sortieren mit Tastsinn
Um die somatosensorische Fähigkeit zu demonstrieren, testen die Forschenden den Greifer an einer Mischung aus Erdbeeren, Weintrauben und Orangen. Ein Greifer mit einem Gewicht von etwa 35 Gramm kann Objekte bis etwa dem Dreifachen seines eigenen Gewichts heben. Wichtiger ist jedoch, dass sich das Muster des Sensorsignals je nach Größe der gehaltenen Frucht unterscheidet: Kleine Erdbeeren bewirken größere Biegungen und damit größere Widerstandsänderungen als eine Traube oder eine Orange. Durch Setzen einer einfachen Schwelle kann der Controller so programmiert werden, dass er nur dann weiter anhebt, wenn das „Erdbeer‑Signal“ erscheint, und alles Größere wieder freigibt. Das ermöglicht eine grundlegende Objekterkennung und Sortierung ganz ohne Kameras oder komplexe Algorithmen, allein mithilfe des weichen Körpers und seines eigenen Deformationssinns.
Was das für zukünftige sanfte Maschinen bedeutet
Alltäglich ausgedrückt zeigt diese Arbeit, wie man eine sehr sanfte, energieeffiziente Roboterhand bauen kann, die spürt, was sie tut, mithilfe von Materialien, die eher an Gelee als an Metall erinnern. Indem Heizung und Sensorik direkt in ein weiches, druckbares Hydrogel verwoben werden, überwindet das Team langjährige Nachteile temperaturgesteuerter Materialien und sperriger Weichrobotik‑Hardware. Das Ergebnis ist ein programmierbarer, niederohmiger Weichgreifer, der empfindliche Gegenstände heben, anhand ihrer Größe entscheiden kann, welche er behalten soll, und in sensiblen Umgebungen arbeiten kann, ohne sie zu überhitzen. Solche somatosensorischen Weichroboter könnten eines Tages in der automatisierten Lebensmittelverarbeitung, der Laborautomatisierung oder in medizinischen Geräten helfen, wo sicherer, behutsamer Tastsinn entscheidend ist.
Zitation: Georgopoulou, A., Aguiriano Calvo, M., Lucherini, L. et al. Programmable somatosensory soft robots. npj Flex Electron 10, 58 (2026). https://doi.org/10.1038/s41528-026-00558-0
Schlüsselwörter: Weichrobotik, Hydrogel-Aktuatoren, intelligente Greifer, reaktive Materialien, robotische Sensorik