Clear Sky Science · en
Programmable somatosensory soft robots
Soft robots that can feel what they touch
Imagine a robot hand gentle enough to pick a ripe strawberry from a pile of fruit without squashing it, and smart enough to know when it has the right one. This paper presents a new kind of soft robotic gripper made from squishy, water-rich materials that can both move and sense their own shape, much like our skin and muscles. By cleverly building heating and sensing functions directly into the material, the authors create a programmable “somatosensory” soft robot that works with simple electronics and very little energy.
Why delicate touch is so hard for robots
Robots have become excellent at heavy lifting and precise, repetitive tasks, but they struggle with fragile objects such as fruit, medical samples, or soft consumer goods. Traditional soft grippers often need pumps, valves, or bulky hardware to move and to sense contact, which makes them complex, noisy, and hard to miniaturize. Another approach is to use special “responsive” materials that move when their environment changes, for instance by heating. A popular example is a hydrogel called PNIPAM: below about body temperature it swells with water, above that it shrinks. In principle, this shrinking and swelling can be turned into motion. In practice, however, PNIPAM usually has to be heated by warming the whole environment, which is slow, power-hungry, and unsuitable for temperature-sensitive surroundings like living tissue.
Turning squishy beads into muscles and nerves
The researchers tackle this challenge by building their gripper from “granular hydrogels”: tiny soft gel particles jammed together and then chemically linked into a solid, yet still very soft, body. They create three versions of this material. One version acts as the moving muscle: it is based on PNIPAM and bends strongly when heated above its trigger temperature. A second version acts as the sensor: it contains a conductive polymer so that its electrical resistance changes when stretched or bent. A third version, made by adding zinc salt and more conductive polymer, acts as a flexible heater: when electricity passes through it, it warms up through Joule heating. Because all three share similar softness, they can be combined into layered structures without creating stiff spots that would crack or fatigue. The team shows that these granular gels bend more, respond faster, and relax back more reliably than conventional bulk hydrogels of similar chemistry.
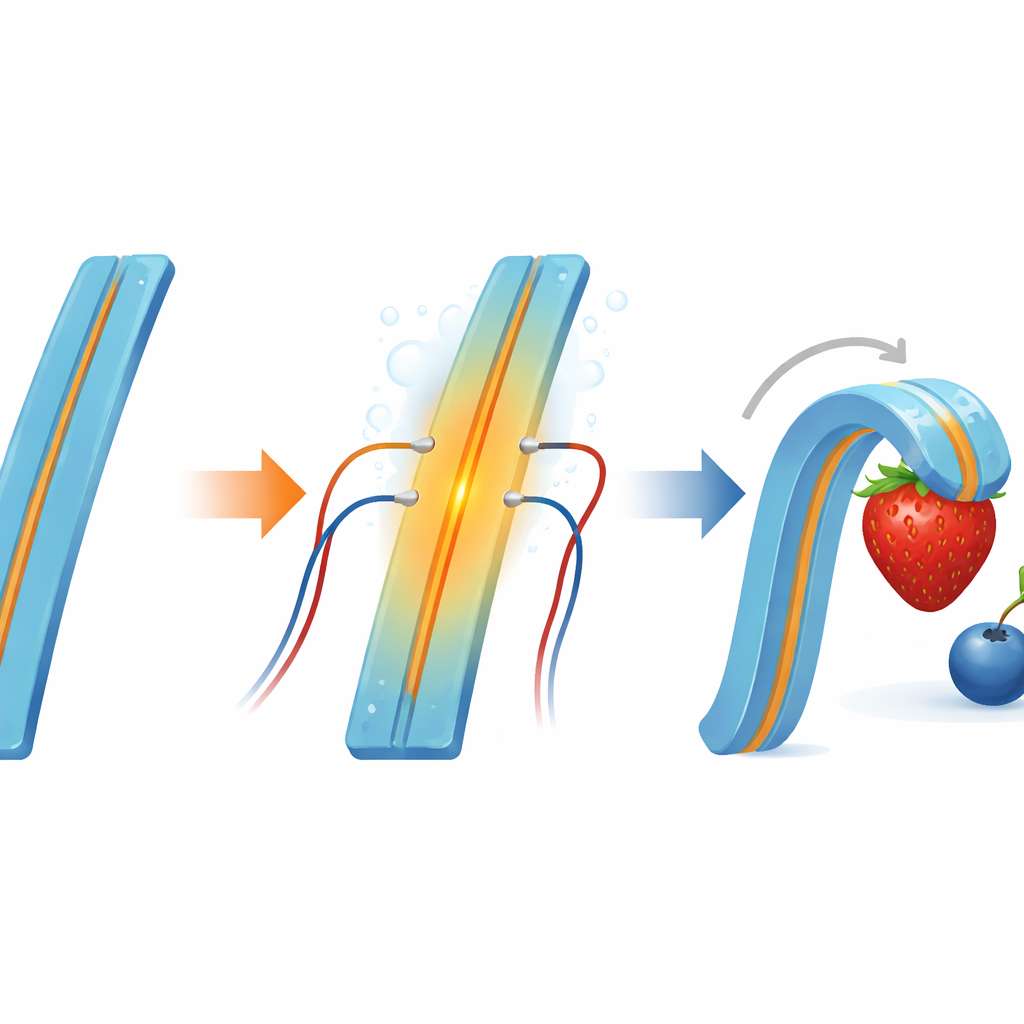
Heating only where it matters
To avoid warming the entire environment, the authors embed thin tracks of the heating material directly inside the bending layer of the gripper. When only 5 volts are applied, these tracks heat up just enough to drive the PNIPAM layer across its transition temperature, causing it to contract and bend. Careful electrical measurements reveal that the combination of ions from zinc chloride and the conductive polymer creates both ionic and electronic pathways that efficiently convert electrical power into local heat, while the overall structure remains as soft and stretchable as the rest of the gripper. Crucially, the water just a centimeter away from the device warms only slightly, showing that the heat is confined mostly to the actuator itself. This targeted heating cuts energy use and makes the system safer for contact with biological tissues or temperature-sensitive goods.
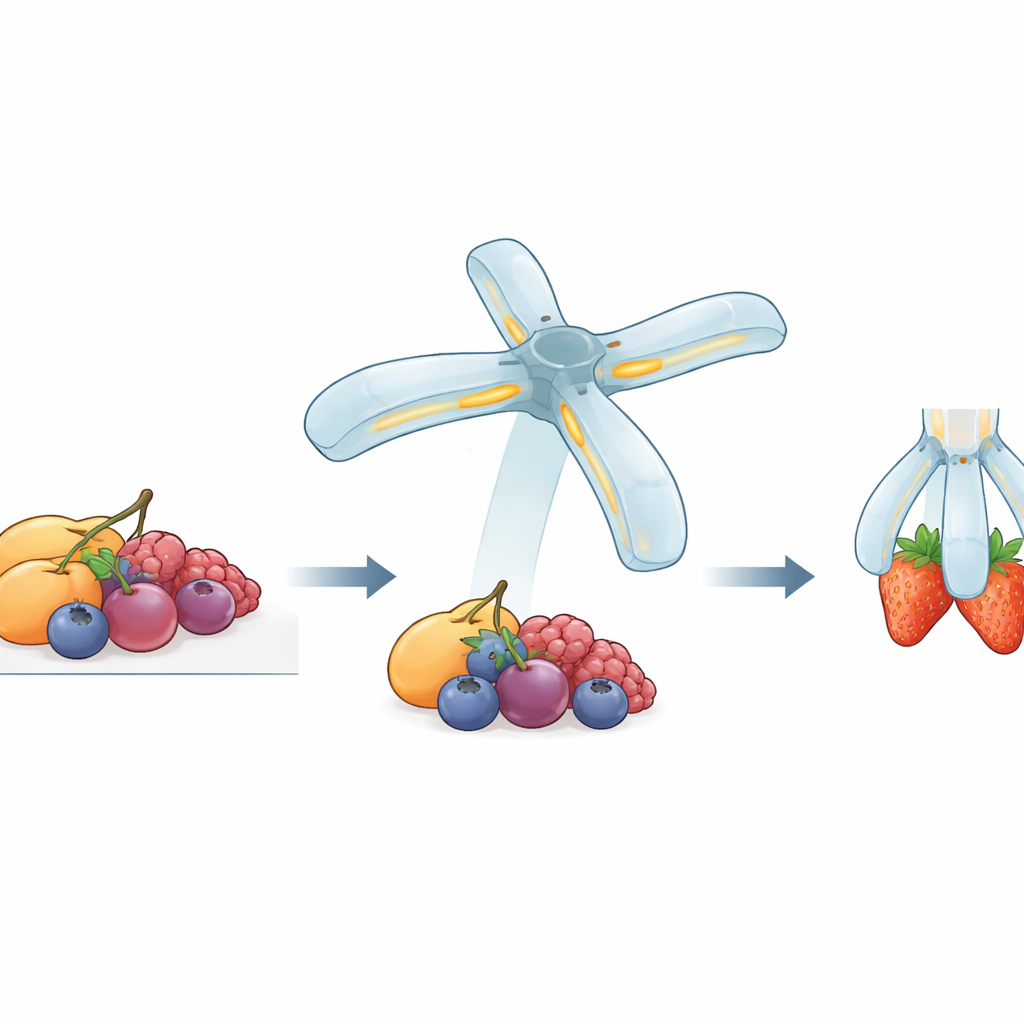
Printing a robot hand that knows when to let go
Because the jammed microgel inks flow under pressure but quickly solidify again, they can be 3D printed into custom shapes. The authors print a cross-shaped, palm-sized gripper whose fingers each contain a moving PNIPAM layer, a sensing layer, and a central heating line. By tuning printing patterns and thickness, they reach bending angles of up to 180 degrees while keeping the material extremely soft (Shore hardness below 10 A) and the power consumption around 2 watts. The built-in sensor layer converts finger bending and contact with an object into a change in electrical resistance. Connected to a simple controller and a robot arm, this signal is used for closed-loop control: the gripper heats, curls around an object, recognizes when it has gripped something of the right size by the size of the resistance change, and then tells the arm when to lift or release.
Sorting fruit with a sense of touch
To show what this somatosensory capability can do, the researchers test the gripper on a mix of strawberries, grapes, and oranges. A gripper weighing about 35 grams can lift objects up to roughly three times its own weight. More importantly, the pattern of the sensor signal differs depending on the size of the fruit being held: small strawberries cause a larger bending and thus a bigger resistance change than a bunch of grapes or an orange. By setting a simple threshold, the controller can be programmed to keep lifting only when the “strawberry signal” appears and to release anything larger. This allows basic object recognition and sorting without cameras or complex algorithms, using only the soft body’s own sense of deformation.
What this means for future gentle machines
In everyday terms, this work shows how to build a very gentle, energy-efficient robotic hand that can feel what it is doing, using materials closer to jelly than to metal. By weaving heating and sensing directly into a soft, printable hydrogel, the team overcomes long-standing drawbacks of temperature-driven materials and bulky soft-robot hardware. The result is a programmable, low-voltage soft gripper that can lift delicate items, decide which ones to keep based on their size, and operate in sensitive environments without overheating them. Such somatosensory soft robots could one day help in automated food handling, lab automation, or medical devices where safe, careful touch is essential.
Citation: Georgopoulou, A., Aguiriano Calvo, M., Lucherini, L. et al. Programmable somatosensory soft robots. npj Flex Electron 10, 58 (2026). https://doi.org/10.1038/s41528-026-00558-0
Keywords: soft robotics, hydrogel actuators, smart grippers, responsive materials, robotic sensing