Clear Sky Science · he
רובוטים רכים סומטוסנסוריים שניתנים לתכנות
רובוטים רכים שמרגישים את המגע שלהם
דמיינו יד רובוטית עדינה מספיק כדי לקטוף תות עסיסי מערימה של פירות בלי למעוך אותו, וחכמה מספיק כדי לדעת מתי היא אחזה בבעלית הנכונה. מאמר זה מציג סוג חדש של מלקט רך עשוי מחומרים ספוגיים עשירי מים שיכול גם לנוע וגם לחוש את צורתו, בדומה לעור ולשרירים שלנו. על־ידי שילוב חכם של פונקציות חימום וחישה ישירות בתוך החומר, החוקרים יוצרים רובוט רך "סומטוסנסורי" הניתן לתכנות, שפועל עם אלקטרוניקה פשוטה וצריכת אנרגיה נמוכה מאוד.
מדוע מגע עדין כל כך קשה לרובוטים
רובוטים הפכו למומחים בהרמת משאות כבדים ובמשימות מדויקות וחזרתיות, אך הם מתקשים עם פריטים שבירים כגון פירות, דגימות רפואיות או מוצרים צרכניים רכים. מלקטים רכים מסורתיים לעתים זקוקים למשאבות, שסתומים או חומרה מגושמת כדי לזוז ולחוש מגע, מה שהופך אותם למורכבים, רועשים וקשים למיניאטור. גישה אחרת משתמשת בחומרים "רספונסיביים" שמגיבים לשינוי בסביבה, למשל על ידי חימום. דוגמה נפוצה היא הידרוגל בשם PNIPAM: בטמפרטורות מתחת לסביבות גוף הוא מתנפח במים, ומעליה הוא מתכווץ. באופן תיאורטי, כיווץ והתנפחות אלו יכולים להתורגם לתנועה. למעשה, עם זאת, PNIPAM בדרך כלל צריך לחמם את כל הסביבה כדי לעבור את המעבר, מה שאיטי, צורכת אנרגיה, ולא מתאים לסביבות רגישות לטמפרטורה כמו רקמות חיות.
הפיכת סופגיות לחניכים ולמערכות עצביות
החוקרים מתמודדים עם האתגר על ידי בנייה של המלקט שלהם מ"הידרוגלים גרנולריים": חלקיקי ג'ל רכים זעירים שנדחסים זה בזה ואז מקושרים כימית לגוף מוצק אך עדיין רך מאוד. הם יוצרים שלוש גרסאות של החומר הזה. גרסה אחת משמשת כשריר הנע: היא מבוססת על PNIPAM ומתכופפת בחוזקה כשמוחממת מעל טמפרטורת הטריגר שלה. גרסה שנייה משמשת כחיישן: היא מכילה פולימר מוליך כך שההתנגדות החשמלית שלה משתנה בעת מתיחה או כיפוף. גרסה שלישית, המיוצרת על ידי הוספת מלח אבץ ויותר פולימר מוליך, משמשת כחמם גמיש: כשעוברת דרכה חשמל היא מתחממת דרך חימום ג'ול. מכיוון שכל שלושת הגרסאות חולקות רכות דומה, ניתן לשלבן במבנים מרובדים מבלי ליצור נקודות קשות שעלולות לסדוק או להישחק. הצוות מראה שההידרוגלים הגרנולריים אלו מתכופפים יותר, מגיבים מהר יותר, ומרגיעים חזרה באופן אמין יותר מהידרוגלים מסורתיים במצב מוצק בעלי כימיה דומה.
חימום רק במקום שבו זה חשוב
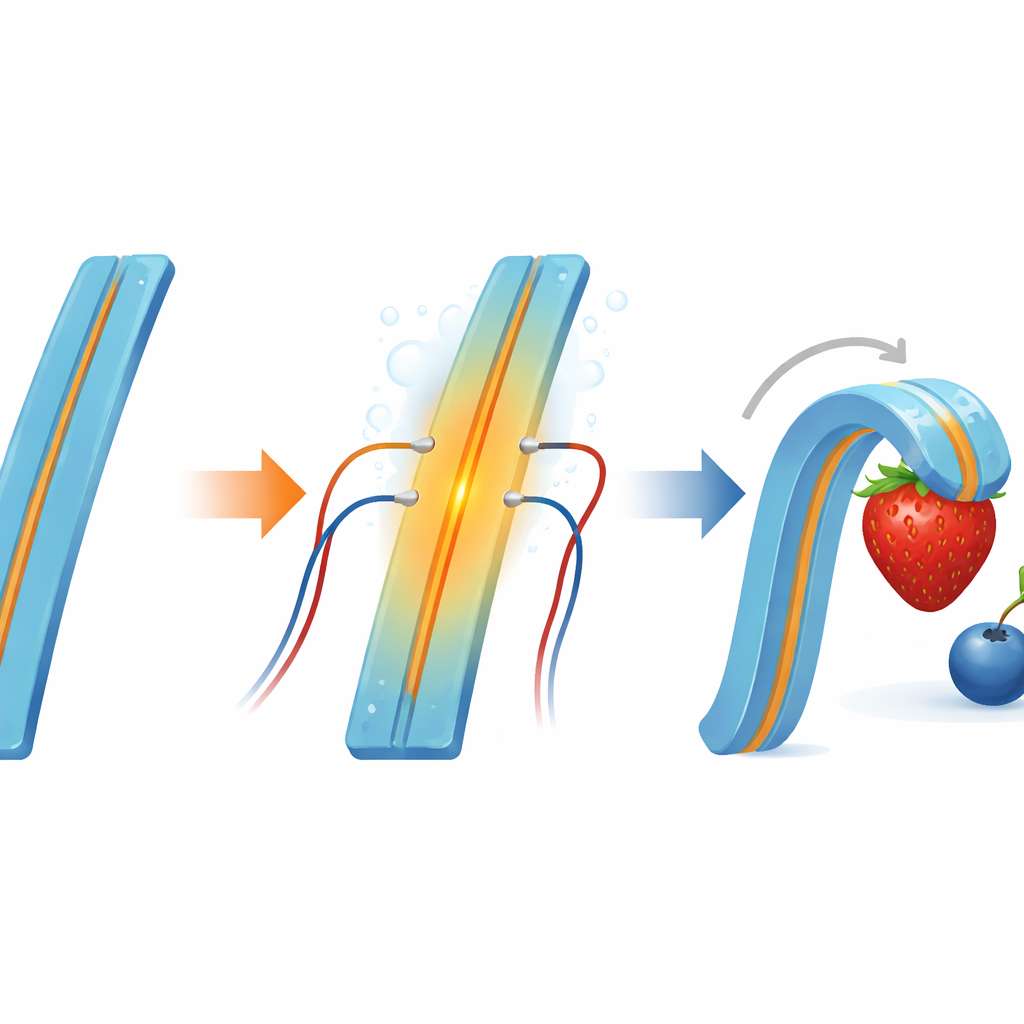
כדי להימנע מחימום כל הסביבה, המחברים משבצים מסלולי חימום דקים של החומר המחמם ישירות בתוך שכבת הכיפוף של המלקט. כשמוחלים רק 5 וולטים, מסלולים אלו מתחממים מספיק כדי לדחוף את שכבת ה-PNIPAM מעבר לטמפרטורת המעבר שלה, לגרום לה להתכווץ ולהתכופף. מדידות חשמליות מדויקות חושפות כי השילוב של יונים מלח כלורי האשלגן (זינק כלורי) והפולימר המוליך יוצר מסלולים יוניים ואלקטרוניים שממירים יעיל כוח חשמלי לחום מקומי, בעוד שהמבנה הכולל נשאר רך ומתמתח כמו שאר המלקט. באופן קריטי, המים הנמצאים רק סנטימטר מהמתקן מתחממים במעט בלבד, מה שמראה שהחום ממוקד ברובו באקטואטור עצמו. חימום ממוקד זה מפחית שימוש באנרגיה ועושה את המערכת בטוחה יותר למגע עם רקמות ביולוגיות או מוצרים רגישי־טמפרטורה.
הדפסת יד רובוטית שיודעת מתי לשחרר
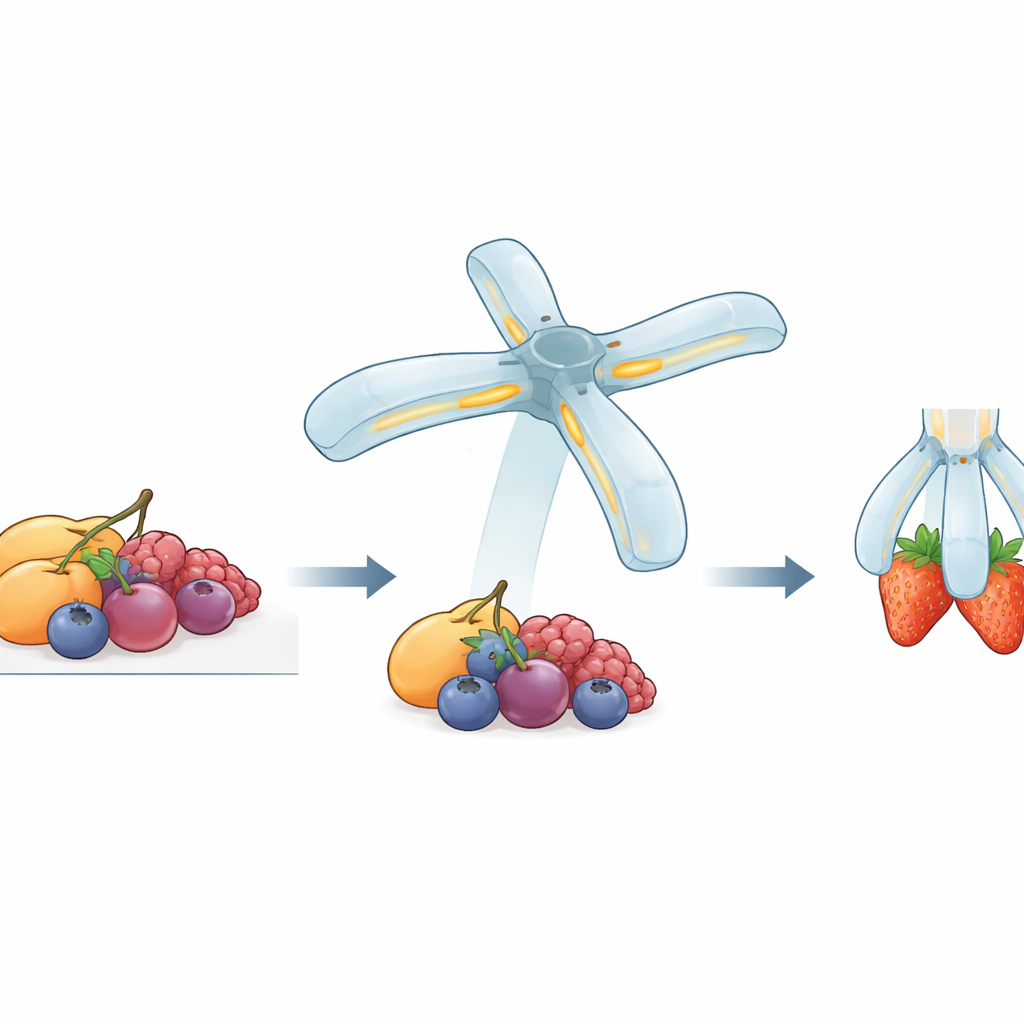
מכיוון שהדיו המיקרוגלד נשאב בלחץ אך מתמצק במהירות שוב, ניתן להדפיס אותו בתלת־ממד לצורות מותאמות. המחברים מדפיסים מלקט צורת צלב בגודל כפות־יד שהאצבעות בו כוללות כל אחת שכבת PNIPAM נעה, שכבת חישה, וקו חימום מרכזי. על־ידי כיוונון דפוסי ההדפסה ועובי השכבות, הם משיגים זוויות כיפוף של עד 180 מעלות תוך שמירה על רכות חומרית מאוד (קשיות שור תחת 10 A) וצריכת כוח סביב 2 וואט. שכבת החיישן המובנית ממירה כיפוף האצבעות ומגע עם עצם לשינוי בהתנגדות החשמלית. מחובר לבקר פשוט ולזרוע רובוטית, אות זה משמש לשליטה בלולאה סגורה: המלקט מתחמם, מתעקל סביב עצם, מזהה מתי הוא אחז במשהו בגודל הרצוי לפי גודל שינוי ההתנגדות, ואז מאותת לזרוע מתי להרים או לשחרר.
מיון פירות עם חוש מישוש
כדי להדגים מה יכול יכולת סומטוסנסורית זו לעשות, החוקרים בודקים את המלקט על תערובת של תותים, ענבים ותפוזים. מלקט שמשקלו כ־35 גרם יכול להרים עצמים במשקל של עד בערך פי שלוש ממשקלו. יותר חשוב מזה, תבנית אות החיישן שונה בהתאם לגודל הפרי הנאחזן: תותים קטנים גורמים לכיפוף גדול יותר ובהתאם לשינוי התנגדות גדול יותר מאשר אשכול ענבים או תפוז. על־ידי קביעת סף פשוט, ניתן לתכנת את הבקר להמשיך להרים רק כאשר מופיע "אות התות" ולשחרר כל דבר גדול יותר. זה מאפשר זיהוי ומיון בסיסי של עצמים ללא מצלמות או אלגוריתמים מורכבים, תוך שימוש אך ורק בחוש העיוות של הגוף הרך עצמו.
מה משמעות הדבר למכונות עדינות בעתיד
במונחים יומיומיים, עבודה זו מראה כיצד לבנות יד רובוטית עדינה וחסכונית מאוד באנרגיה שיכולה להרגיש מה היא עושה, באמצעות חומרים שקרובים יותר לג'לי מאשר למתכת. על־ידי אריגה של חימום וחישה ישירות לתוך הידרוגל רך וניתן להדפסה, הצוות מתגבר על חסרונות ישנים של חומרים מונעי-טמפרטורה וחומרה רכה מגושמת. התוצאה היא מלקט רך קצר־מתח הניתן לתכנות שיכול להרים פריטים עדינים, להחליט אילו לשמור בהתאם לגודלם, ולפעול בסביבות רגישות ללא חימום יתר. רובוטים רכים סומטוסנסוריים כאלה עשויים יום אחד לסייע בטיפול אוטומטי במזון, באוטומציה למעבדות, או בהתקנים רפואיים שבהם מגע בטוח וזהיר הוא חיוני.
ציטוט: Georgopoulou, A., Aguiriano Calvo, M., Lucherini, L. et al. Programmable somatosensory soft robots. npj Flex Electron 10, 58 (2026). https://doi.org/10.1038/s41528-026-00558-0
מילות מפתח: רובוטיקה רכה, מניעים מבוססי הידרוגרל, מלקטים חכמים, חומרים רספונסיביים, חישה רובוטית