Clear Sky Science · ru
Программируемые соматосенсорные мягкие роботы
Мягкие роботы, которые чувствуют то, к чему прикасаются
Представьте себе роботизированную руку настолько деликатную, что может сорвать спелую клубнику из тарелки, не раздавив её, и при этом достаточно умную, чтобы понять, что она взяла именно нужную ягоду. В этой статье представлен новый тип мягкого захвата из упругих водосодержащих материалов, который одновременно движется и чувствует свою форму, подобно нашей коже и мышцам. Встраивая функции нагрева и сенсинга непосредственно в материал, авторы создают программируемого «сомато-сенсорного» мягкого робота, который работает с простыми электроникой и очень низким энергопотреблением.
Почему роботу трудно обеспечить деликатное прикосновение
Роботы отлично справляются с тяжёлой работой и точными повторяющимися операциями, но испытывают трудности с хрупкими предметами — фруктами, медицинскими образцами или мягкими потребительскими товарами. Традиционные мягкие захваты часто требуют насосов, клапанов или громоздкого оборудования для приведения в движение и обнаружения контакта, что делает их сложными, шумными и трудными для миниатюризации. Другой подход — использовать специальные «отзывчивые» материалы, которые деформируются при изменении окружающей среды, например при нагреве. Популярный пример — гидрогель PNIPAM: ниже примерно температуры тела он набухает от воды, выше — сжимается. В теории это набухание и усадка могут быть использованы для движения. На практике же PNIPAM обычно приходится нагревать вместе с окружающей средой, что медленно, энергозатратно и непригодно для температурно-чувствительных сред, таких как живая ткань.
Преобразование мягких шариков в мышцы и нервы
Исследователи решают эту проблему, создавая захват из «гранулярных гидрогелей»: крошечных мягких гелевых частиц, упакованных друг с другом и затем химически связанных в единое, но всё ещё очень мягкое тело. Они разработали три варианта этого материала. Один вариант действует как движущаяся мышца: он основан на PNIPAM и сильно изгибается при нагреве выше пороговой температуры. Второй вариант служит сенсором: он содержит проводящий полимер, поэтому его электрическое сопротивление меняется при растяжении или изгибе. Третий вариант, полученный добавлением солей цинка и большего количества проводящего полимера, выступает в роли гибкого нагревателя: при протекании тока он нагревается за счёт эффекта Джоуля. Поскольку все три типа обладают схожей мягкостью, их можно комбинировать в многослойные структуры без появления жёстких участков, которые могли бы треснуть или устать. Авторы показывают, что эти гранулярные гели изгибаются сильнее, реагируют быстрее и надёжнее возвращаются в исходное состояние по сравнению с обычными монолитными гидрогелями аналогичной химии.
Нагрев только там, где это важно
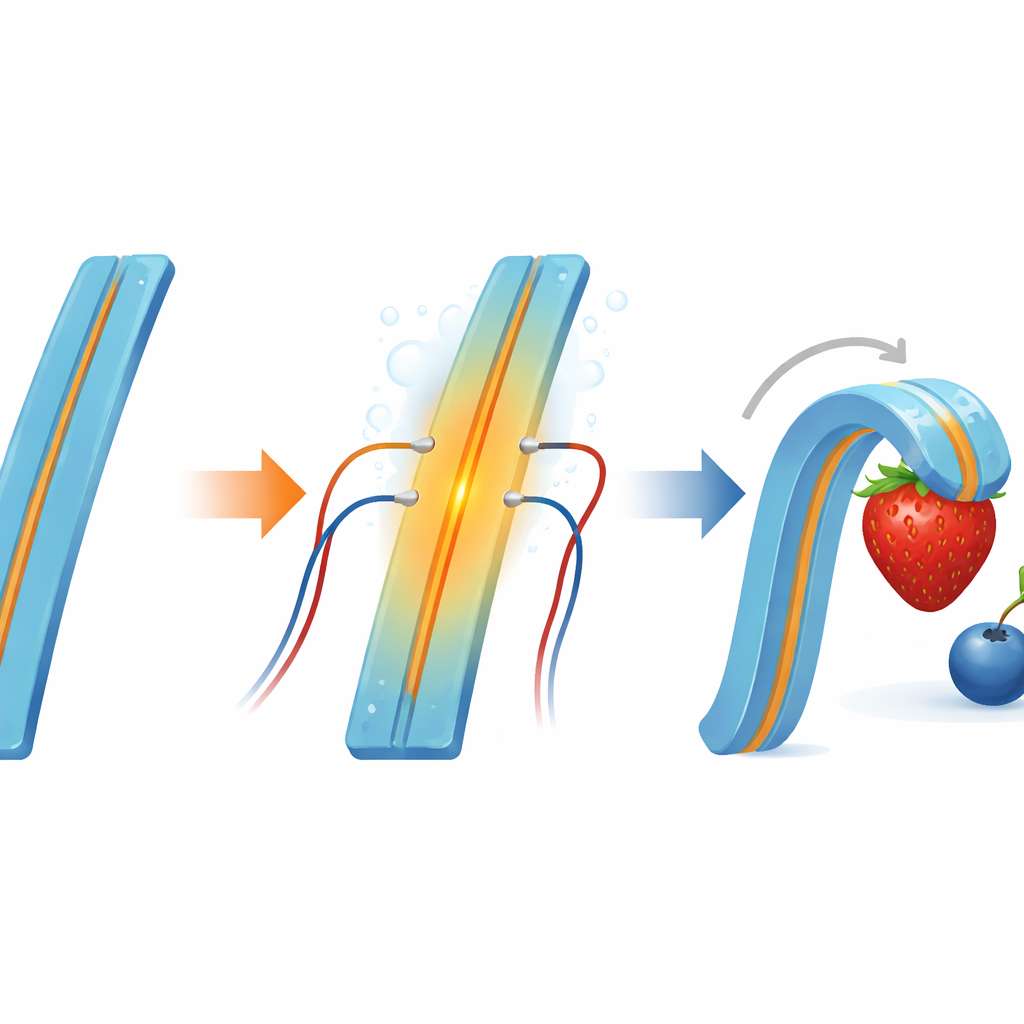
Чтобы избежать прогрева всей окружающей среды, авторы внедряют тонкие дорожки нагревающего материала непосредственно в изгибающийся слой захвата. При подаче всего 5 вольт эти дорожки нагреваются в достаточной степени, чтобы перевести слой PNIPAM через его переходную температуру, заставляя его сокращаться и сгибаться. Точные электрические измерения показывают, что сочетание ионов хлорида цинка и проводящего полимера создаёт как ионные, так и электронные проводящие пути, которые эффективно преобразуют электрическую энергию в локальное тепло, при этом общая структура остаётся такой же мягкой и растяжимой, как и остальная часть захвата. Важно то, что вода всего в сантиметре от устройства нагревается лишь незначительно, что демонстрирует, что тепло в основном локализовано в самом приводе. Такая целевая локализация нагрева сокращает энергопотребление и делает систему безопаснее для контакта с биологическими тканями или температурно-чувствительными товарами.
Печать роботизированной руки, которая знает, когда отпустить
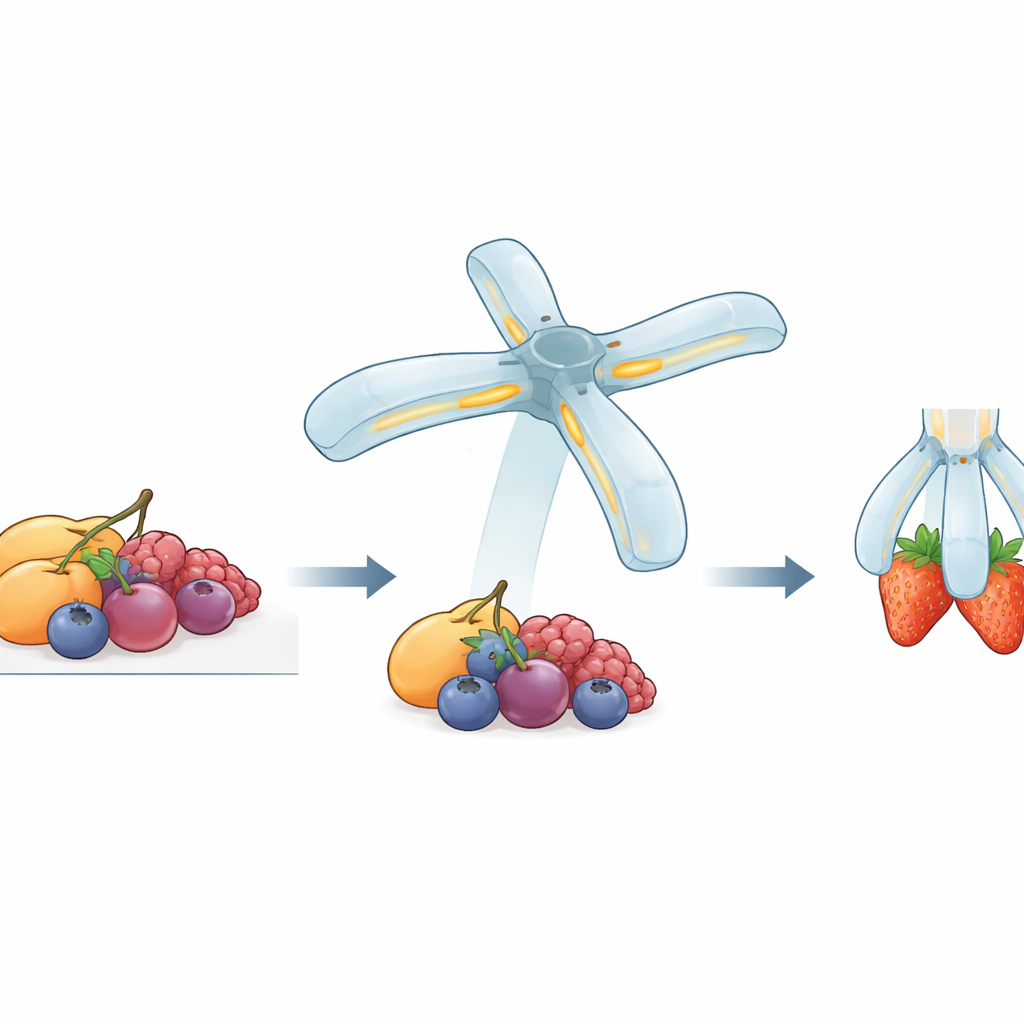
Поскольку вязкие чернила из упакованных микрогелей текут под давлением, но быстро затвердевают вновь, их можно 3D-печатать в заданных формах. Авторы напечатали крестовидный захват размером с ладонь, у каждого «пальца» которого есть движущийся слой PNIPAM, слой сенсора и центральная нагревательная дорожка. Настраивая шаблоны печати и толщину слоёв, они достигли углов изгиба до 180 градусов, сохранив при этом чрезвычайную мягкость материала (твердость по Шору ниже 10 A) и потребление энергии порядка 2 ватт. Встроенный сенсорный слой преобразует изгиб пальца и контакт с объектом в изменение электрического сопротивления. Подключённый к простому контроллеру и роборуке, этот сигнал используется для замкнутого управления: захват нагревается, обхватывает предмет, определяет по величине изменения сопротивления, взят ли предмет нужного размера, и сообщает руке, когда поднять или отпустить.
Сортировка фруктов с чувством осязания
Чтобы продемонстрировать возможности такой соматосенсорной системы, исследователи испытали захват на смеси клубники, винограда и апельсинов. Захват массой около 35 граммов может поднимать предметы примерно в три раза тяжелее себя. Ещё важнее то, что профиль сигнала сенсора отличается в зависимости от размера захваченного фрукта: маленькая клубника вызывает более сильный изгиб и, следовательно, большее изменение сопротивления, чем кисть винограда или апельсин. Установив простой порог, контроллер можно запрограммировать так, чтобы продолжать поднимать предмет только при появлении «сигнала клубники» и отпускать всё более крупное. Это обеспечивает базовое распознавание и сортировку объектов без камер или сложных алгоритмов, используя лишь собственное ощущение деформации мягкого тела.
Что это значит для будущих деликатных машин
Говоря простыми словами, эта работа показывает, как построить очень бережную и энергоэффективную роботизированную руку, которая чувствует свои действия, используя материалы ближе по свойствам к желе, чем к металлу. Встраивая нагрев и сенсинг непосредственно в мягкий печатаемый гидрогель, команда преодолевает давно известные недостатки термочувствительных материалов и громоздкого оборудования мягкой робототехники. В результате получается программируемый мягкий захват с низким рабочим напряжением, способный поднимать хрупкие предметы, выбирать их по размеру и работать в чувствительной среде, не перегревая её. Такие соматосенсорные мягкие роботы могут в будущем помочь в автоматизированной обработке продуктов, лабораторной автоматизации или медицинских устройствах, где важен безопасный и осторожный контакт.
Цитирование: Georgopoulou, A., Aguiriano Calvo, M., Lucherini, L. et al. Programmable somatosensory soft robots. npj Flex Electron 10, 58 (2026). https://doi.org/10.1038/s41528-026-00558-0
Ключевые слова: мягкая робототехника, гидрогелевые приводы, умные захваты, чувствительные материалы, роботическое осязание