Clear Sky Science · pt
Robôs sensoriais táteis e programáveis feitos de materiais macios
Robôs macios que conseguem sentir o que tocam
Imagine uma mão robótica suficientemente delicada para colher um morango maduro de um monte de fruta sem amassá‑lo, e inteligente o bastante para saber quando agarrou o correto. Este artigo apresenta um novo tipo de garra robótica macia feita de materiais gelatinosos e ricos em água que podem tanto se mover quanto sentir sua própria forma, muito parecido com nossa pele e músculos. Ao incorporar de forma engenhosa funções de aquecimento e sensoriamento diretamente no material, os autores criam um robô macio “somatossensorial” programável que funciona com eletrônica simples e consumo de energia muito baixo.
Por que o toque delicado é tão difícil para robôs
Robôs tornaram‑se excelentes em levantar cargas pesadas e executar tarefas repetitivas com precisão, mas têm dificuldade com objetos frágeis como frutas, amostras médicas ou bens de consumo macios. Garrafas macias tradicionais frequentemente precisam de bombas, válvulas ou hardware volumoso para se mover e detectar contato, o que as torna complexas, barulhentas e difíceis de miniaturizar. Outra abordagem é usar materiais “responsivos” que se movem quando o ambiente muda, por exemplo com aquecimento. Um exemplo popular é o hidrogel PNIPAM: abaixo de aproximadamente a temperatura corporal ele incha com água; acima, contrai. Em princípio, essa contração e expansão pode ser convertida em movimento. Na prática, porém, o PNIPAM costuma exigir aquecer todo o ambiente, o que é lento, consome muita energia e é inadequado para ambientes sensíveis à temperatura, como tecido vivo.
Transformando micro‑esferas gelatinosas em músculos e nervos
Os pesquisadores enfrentam esse desafio construindo a garra a partir de “hidrogéis granulares”: minúsculas partículas de gel macio compactadas entre si e depois quimicamente ligadas em um corpo sólido, porém ainda muito macio. Eles criam três versões desse material. Uma versão atua como músculo: baseada em PNIPAM, ela se dobra fortemente quando aquecida acima de sua temperatura de acionamento. Uma segunda versão funciona como sensor: contém um polímero condutor cuja resistência elétrica muda quando é esticado ou dobrado. Uma terceira versão, obtida adicionando sal de zinco e mais polímero condutor, atua como um aquecedor flexível: quando passa corrente elétrica por ele, aquece por efeito Joule. Como as três têm maciez semelhante, podem ser combinadas em estruturas em camadas sem criar pontos rígidos que rachariam ou fatigariam. A equipe demonstra que esses géis granulares dobram mais, respondem mais rápido e relaxam de volta de forma mais confiável do que hidrogéis maciços convencionais de química semelhante.
Aquecer apenas onde importa
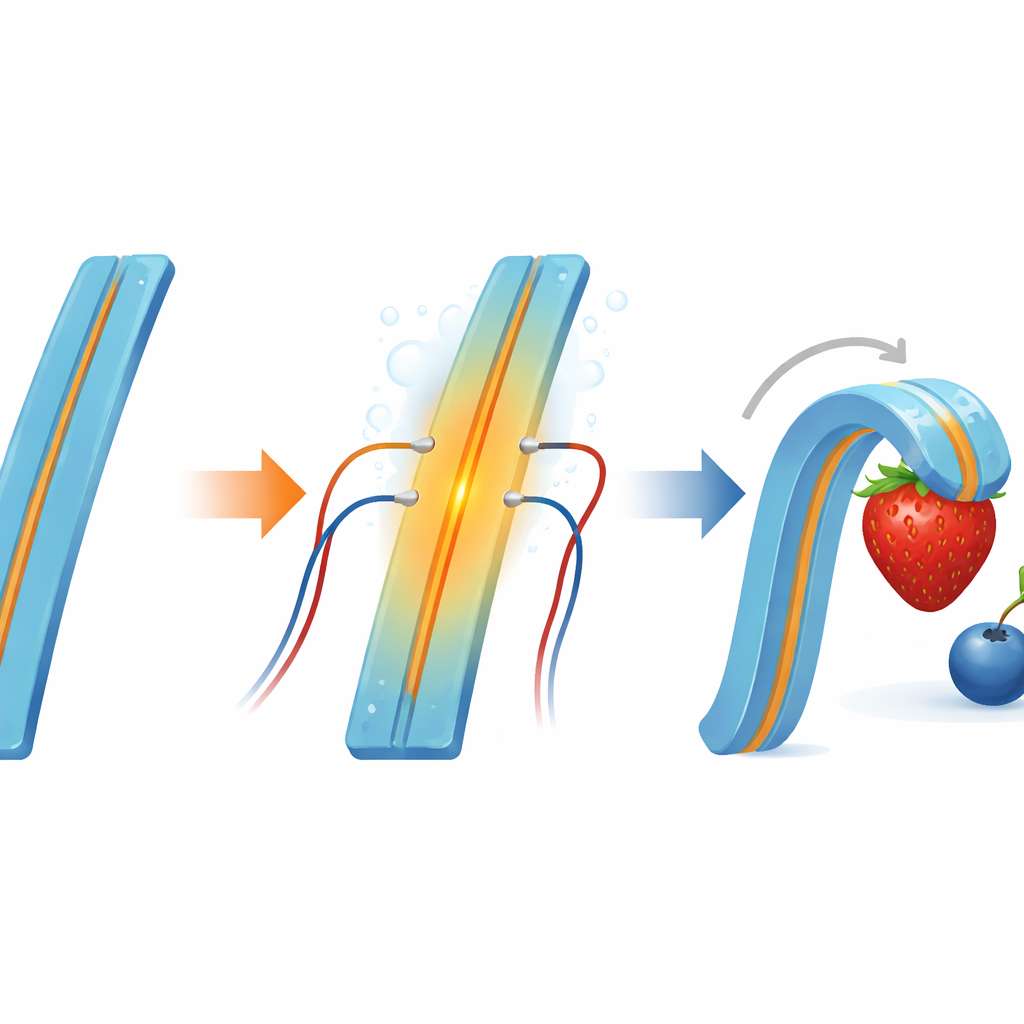
Para evitar aquecer todo o ambiente, os autores incorporam trilhas finas do material aquecedor diretamente dentro da camada dobrável da garra. Quando aplicados apenas 5 volts, essas trilhas aquecem o suficiente para levar a camada de PNIPAM através de sua temperatura de transição, fazendo‑a contrair e dobrar. Medições elétricas cuidadosas revelam que a combinação de íons do cloreto de zinco e do polímero condutor cria caminhos iônicos e eletrônicos que convertem de forma eficiente potência elétrica em calor local, enquanto a estrutura geral permanece tão macia e elástica quanto o restante da garra. Crucialmente, a água a apenas um centímetro do dispositivo aquece muito pouco, mostrando que o calor fica confinado principalmente ao atuador. Esse aquecimento direcionado reduz o consumo de energia e torna o sistema mais seguro para contato com tecidos biológicos ou produtos sensíveis à temperatura.
Imprimindo uma mão robótica que sabe quando soltar
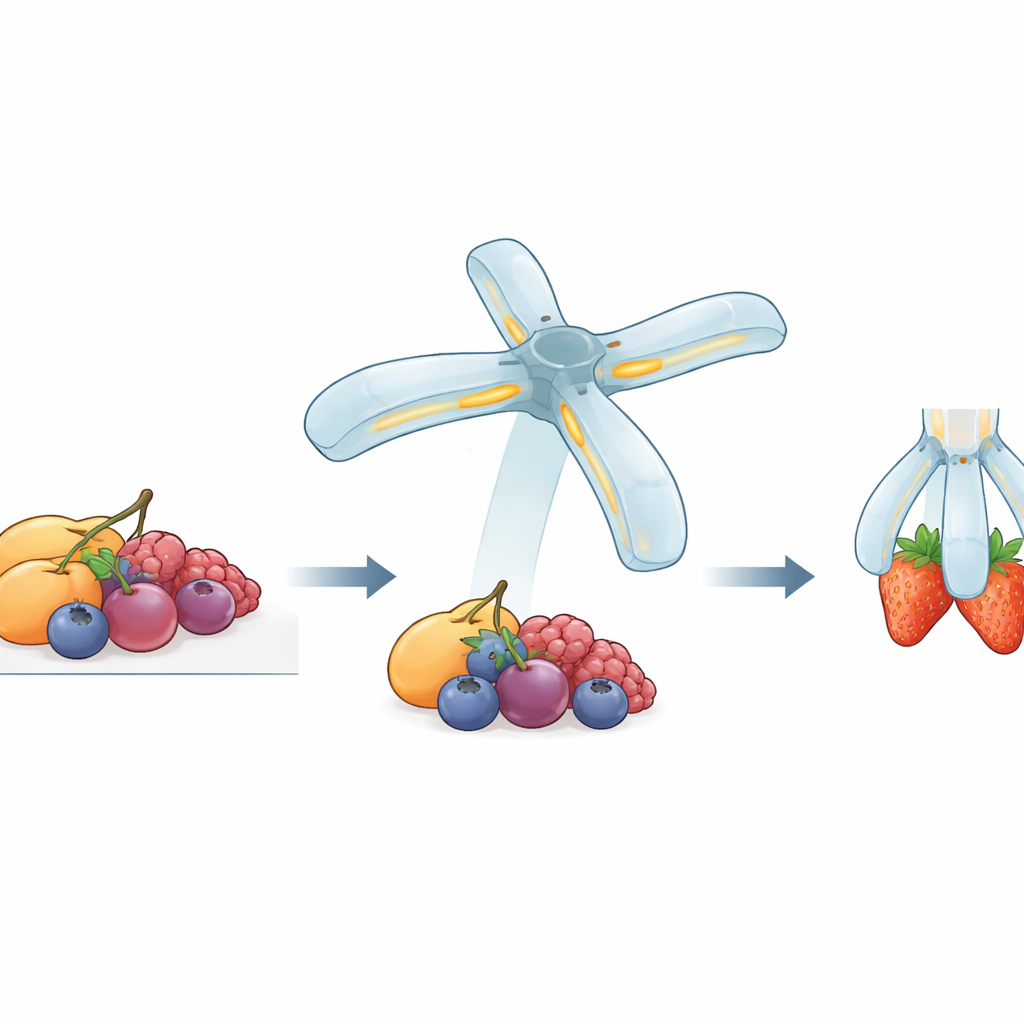
Como as tintas de microgel compactadas fluem sob pressão mas solidificam rapidamente, elas podem ser impressas em 3D em formas personalizadas. Os autores imprimem uma garra em forma de cruz do tamanho da palma cuja cada “dedo” contém uma camada móvel de PNIPAM, uma camada sensora e uma linha central de aquecimento. Ao ajustar os padrões de impressão e a espessura, chegam a ângulos de dobra de até 180 graus mantendo o material extremamente macio (dureza Shore abaixo de 10 A) e consumo de energia em torno de 2 watts. A camada sensora embutida converte a dobra dos dedos e o contato com um objeto em uma mudança na resistência elétrica. Conectado a um controlador simples e a um braço robótico, esse sinal é usado em controle em malha fechada: a garra aquece, enrola‑se em torno de um objeto, reconhece quando agarrou algo do tamanho certo pela magnitude da mudança de resistência e então indica ao braço quando levantar ou soltar.
Separando frutas com sentido de tato
Para demonstrar o que essa capacidade somatossensorial pode fazer, os pesquisadores testam a garra em uma mistura de morangos, uvas e laranjas. Uma garra pesando cerca de 35 gramas consegue levantar objetos de até aproximadamente três vezes seu próprio peso. Mais importante, o padrão do sinal do sensor difere dependendo do tamanho da fruta segurada: morangos pequenos causam uma dobra maior e, portanto, uma variação de resistência maior do que um cacho de uvas ou uma laranja. Ao definir um limiar simples, o controlador pode ser programado para continuar levantando apenas quando aparecer o “sinal de morango” e soltar qualquer coisa maior. Isso permite reconhecimento e classificação básicos de objetos sem câmeras ou algoritmos complexos, usando apenas o próprio sentido de deformação do corpo macio.
O que isso significa para máquinas gentis no futuro
Em termos práticos, este trabalho mostra como construir uma mão robótica muito delicada e energeticamente eficiente que consegue sentir o que está fazendo, usando materiais mais próximos de gelatina do que de metal. Ao integrar aquecimento e sensoriamento diretamente em um hidrogel macio e imprimível, a equipe supera limitações de longa data dos materiais acionados por temperatura e do hardware volumoso de robótica macia. O resultado é uma garra macia, programável e de baixa tensão que pode erguer itens delicados, decidir quais manter com base no tamanho e operar em ambientes sensíveis sem superaquecer. Robôs macios somatossensoriais assim podem um dia ajudar na manipulação automatizada de alimentos, automação de laboratórios ou dispositivos médicos onde um toque seguro e cuidadoso é essencial.
Citação: Georgopoulou, A., Aguiriano Calvo, M., Lucherini, L. et al. Programmable somatosensory soft robots. npj Flex Electron 10, 58 (2026). https://doi.org/10.1038/s41528-026-00558-0
Palavras-chave: robótica macia, atuadores de hidrogel, pinças inteligentes, materiais responsivos, sensoriamento robótico