Clear Sky Science · fr
Robots mous somatosensoriels programmables
Des robots souples qui peuvent sentir ce qu’ils touchent
Imaginez une main robotique assez délicate pour cueillir une fraise mûre dans un tas de fruits sans l’écraser, et assez intelligente pour savoir quand elle a choisi la bonne. Cet article présente un nouveau type de pince robotique souple fabriquée à partir de matériaux mous et riches en eau qui peuvent à la fois se mouvoir et sentir leur propre forme, un peu comme notre peau et nos muscles. En intégrant astucieusement des fonctions de chauffage et de détection directement dans le matériau, les auteurs créent un robot souple « somatosensoriel » programmable qui fonctionne avec une électronique simple et très peu d’énergie.
Pourquoi le toucher délicat est si difficile pour les robots
Les robots excellent pour soulever des charges lourdes et effectuer des tâches précises et répétitives, mais ils peinent avec des objets fragiles comme des fruits, des échantillons médicaux ou des biens consommables mous. Les pinces souples traditionnelles nécessitent souvent des pompes, des vannes ou du matériel encombrant pour se mouvoir et détecter le contact, ce qui les rend complexes, bruyantes et difficiles à miniaturiser. Une autre approche consiste à utiliser des matériaux « réactifs » qui se déplacent lorsque l’environnement change, par exemple sous l’effet de la chaleur. Un exemple courant est l’hydrogel PNIPAM : en dessous d’environ la température corporelle il gonfle d’eau, au-dessus il se rétracte. En principe, ce gonflement et cette rétraction peuvent être convertis en mouvement. En pratique, toutefois, le PNIPAM doit généralement être chauffé en réchauffant tout l’environnement, ce qui est lent, énergivore et inadapté aux milieux sensibles à la température comme les tissus vivants.
Transformer des billes molles en muscles et nerfs
Les chercheurs relèvent ce défi en construisant leur pince à partir d’« hydrogels granulaires » : de minuscules particules de gel souple compactées puis liées chimiquement pour former un corps solide mais très souple. Ils créent trois versions de ce matériau. Une version sert de muscle mobile : elle est à base de PNIPAM et se courbe fortement lorsqu’elle est chauffée au-delà de sa température de transition. Une seconde version sert de capteur : elle contient un polymère conducteur dont la résistance électrique varie lorsqu’il est étiré ou plié. Une troisième version, obtenue en ajoutant du sel de zinc et davantage de polymère conducteur, fait office de chauffage flexible : lorsque l’électricité la parcourt, elle se réchauffe par effet Joule. Comme les trois présentent une douceur similaire, elles peuvent être combinées en structures stratifiées sans créer de zones rigides susceptibles de se fissurer ou de s’user. L’équipe montre que ces gels granulaires se plient davantage, répondent plus vite et reprennent leur forme plus fiablement que les hydrogels massifs conventionnels de chimie comparable.
Chauffer uniquement là où c’est utile
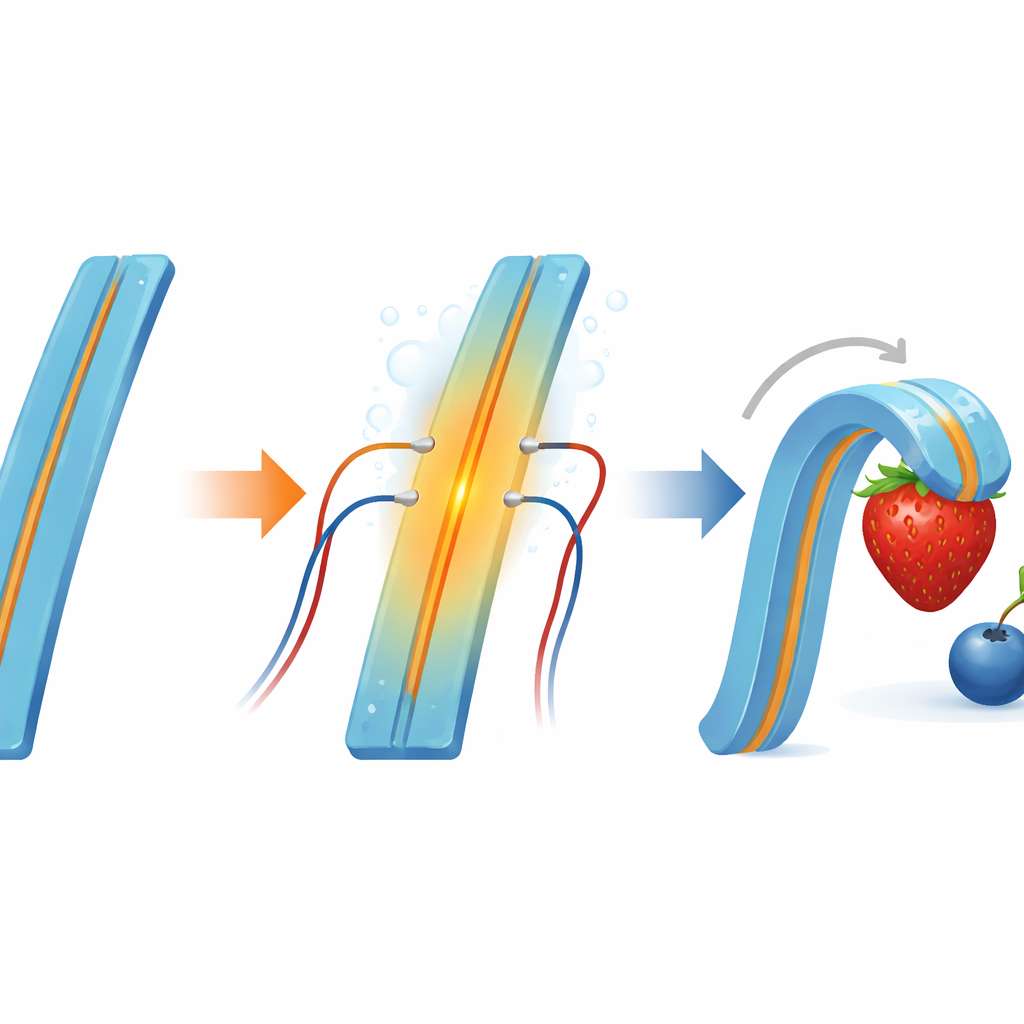
Pour éviter de réchauffer tout l’environnement, les auteurs intègrent de fins tracés du matériau chauffant directement à l’intérieur de la couche de flexion de la pince. Lorsqu’on applique seulement 5 volts, ces voies chauffent juste assez pour faire passer la couche de PNIPAM au-dessus de sa température de transition, provoquant sa contraction et sa flexion. Des mesures électriques minutieuses révèlent que la combinaison des ions du chlorure de zinc et du polymère conducteur crée des voies ioniques et électroniques qui convertissent efficacement la puissance électrique en chaleur locale, tandis que la structure globale reste aussi souple et extensible que le reste de la pince. Surtout, l’eau située à un centimètre de l’appareil ne se réchauffe que légèrement, montrant que la chaleur est principalement confinée à l’actionneur lui‑même. Ce chauffage ciblé réduit la consommation d’énergie et rend le système plus sûr pour le contact avec des tissus biologiques ou des produits sensibles à la température.
Imprimer une main robotique qui sait quand lâcher
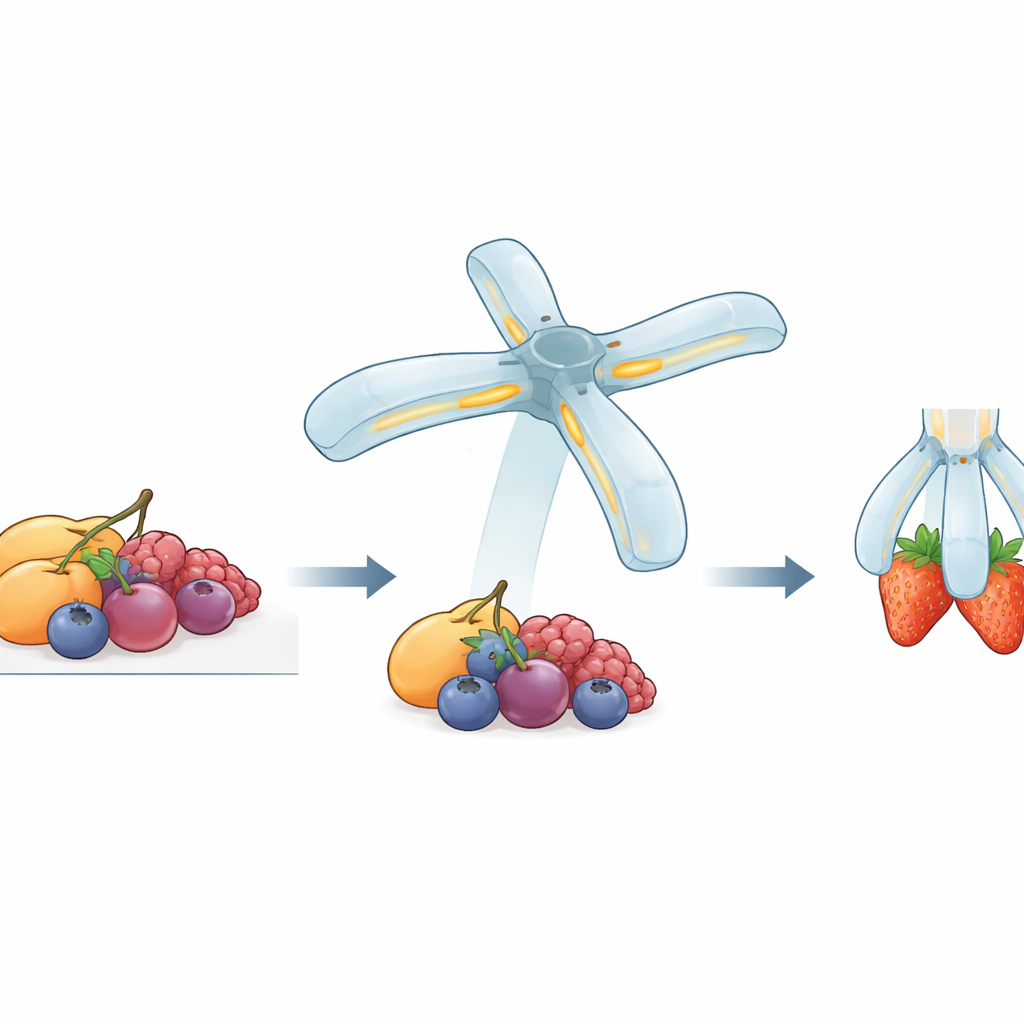
Parce que les encres de microgel compactées s’écoulent sous pression mais se solidifient rapidement, elles peuvent être imprimées en 3D en formes sur mesure. Les auteurs impriment une pince en forme de croix, de la taille d’une paume, dont chaque doigt contient une couche mobile de PNIPAM, une couche de détection et une ligne de chauffage centrale. En ajustant les motifs d’impression et l’épaisseur, ils atteignent des angles de flexion allant jusqu’à 180 degrés tout en maintenant le matériau extrêmement souple (dureté Shore inférieure à 10 A) et une consommation électrique d’environ 2 watts. La couche capteur intégrée convertit la flexion des doigts et le contact avec un objet en une variation de résistance électrique. Relié à un contrôleur simple et à un bras robotique, ce signal sert au contrôle en boucle fermée : la pince chauffe, s’enroule autour d’un objet, reconnaît quand elle a saisi une pièce de la bonne taille d’après l’amplitude du changement de résistance, puis indique au bras quand soulever ou relâcher.
Trier des fruits avec un sens du toucher
Pour démontrer ce que cette capacité somatosensorielle permet, les chercheurs testent la pince sur un mélange de fraises, de raisins et d’oranges. Une pince pesant environ 35 grammes peut soulever des objets pesant jusqu’à trois fois son propre poids. Plus important encore, la forme du signal du capteur diffère selon la taille du fruit tenu : les petites fraises provoquent une plus grande flexion et donc une plus grande variation de résistance que des grappes de raisins ou une orange. En définissant un simple seuil, le contrôleur peut être programmé pour continuer à soulever uniquement lorsque le « signal fraise » apparaît et pour relâcher tout objet plus volumineux. Cela permet une reconnaissance et un tri élémentaires sans caméras ni algorithmes complexes, en utilisant seulement la sensibilité intrinsèque du corps souple à la déformation.
Ce que cela signifie pour les machines délicates de demain
Concrètement, ce travail montre comment construire une main robotique très douce et économe en énergie qui peut sentir ce qu’elle fait, en utilisant des matériaux plus proches de la gelée que du métal. En intégrant chauffage et détection directement dans un hydrogel imprimable et souple, l’équipe surmonte des limites de longue date des matériaux activés par la température et du matériel encombrant des robots mous. Le résultat est une pince souple programmable, à basse tension, capable de soulever des objets délicats, de décider lesquelles conserver selon leur taille, et d’opérer dans des environnements sensibles sans les surchauffer. De tels robots souples somatosensoriels pourraient un jour aider dans la manutention automatisée des aliments, l’automatisation de laboratoires ou les dispositifs médicaux où un toucher sûr et précautionneux est essentiel.
Citation: Georgopoulou, A., Aguiriano Calvo, M., Lucherini, L. et al. Programmable somatosensory soft robots. npj Flex Electron 10, 58 (2026). https://doi.org/10.1038/s41528-026-00558-0
Mots-clés: robotique souple, actionneurs en hydrogel, pinces intelligentes, matériaux réactifs, capteurs robotiques