Clear Sky Science · sv
Programmerbara somatosensoriska mjuka robotar
Mjuka robotar som kan känna det de rör vid
Föreställ dig en robot hand tillräckligt försiktig för att plocka en mogen jordgubbe ur en frukthög utan att klämma sönder den, och tillräckligt smart för att veta när den fått rätt bär. Den här artikeln presenterar en ny typ av mjukt robotgripverktyg gjort av kletiga, vattenrika material som både kan röra sig och känna sin egen form, ungefär som vår hud och våra muskler. Genom att slugt integrera uppvärmnings- och sensorsfunktioner direkt i materialet skapar författarna en programmerbar ”somatosensorisk” mjuk robot som fungerar med enkel elektronik och mycket låg energiförbrukning.
Varför mjuk beröring är så svårt för robotar
Robotar har blivit utmärkta på tungt lyft och precisa, upprepade uppgifter, men de har svårt med bräckliga föremål som frukt, medicinska prover eller mjuka konsumentprodukter. Traditionella mjuka gripare behöver ofta pumpar, ventiler eller skrymmande hårdvara för att röra sig och känna kontakt, vilket gör dem komplexa, bullriga och svåra att minska i storlek. Ett annat tillvägagångssätt är att använda särskilda ”responsiva” material som rör sig när deras omgivning förändras, till exempel vid uppvärmning. Ett välkänt exempel är en hydrogel kallad PNIPAM: under ungefär kroppstemperatur sväller den med vatten, över den krymper den. I princip kan denna krympning och svällning omvandlas till rörelse. I praktiken måste PNIPAM dock ofta värmas genom att hela omgivningen höjs i temperatur, vilket är långsamt, energikrävande och olämpligt för temperaturkänsliga miljöer som levande vävnad.
Förvandla kletiga pärlor till muskler och nerver
Forskarna angriper denna utmaning genom att bygga sitt gripverktyg av ”granulära hydrogeler”: små mjuka gelpartiklar som packas tätt och sedan kemiskt binds ihop till en fast men fortfarande mycket mjuk kropp. De skapar tre versioner av detta material. En version fungerar som den rörliga muskeln: den baseras på PNIPAM och böjer sig kraftigt när den värms över sin tröskeltemperatur. En andra version fungerar som sensor: den innehåller en ledande polymer så att dess elektriska resistans ändras när den sträcks eller böjs. En tredje version, gjord genom att tillsätta zinksalt och mer ledande polymer, fungerar som en flexibel värmare: när elektricitet passerar genom den värms den upp genom Joule-effekt. Eftersom alla tre har liknande mjukhet kan de kombineras i lagerstrukturer utan att skapa stela punkter som skulle spricka eller tröttas ut. Teamet visar att dessa granulära geler böjer sig mer, reagerar snabbare och återgår mer pålitligt än konventionella massiva hydrogeler med liknande kemi.
Värme endast där det spelar roll
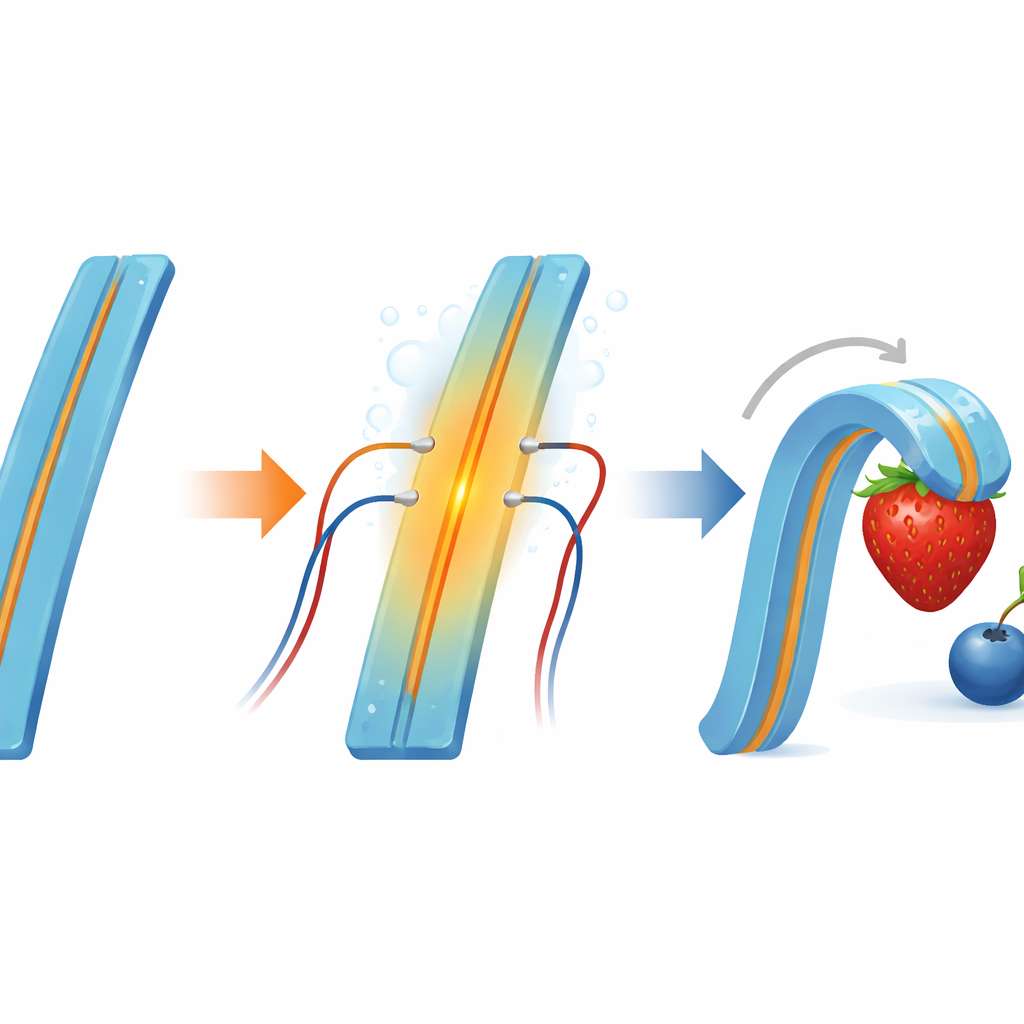
För att undvika att värma hela omgivningen bäddar författarna in tunna banor av värmematerialet direkt i böjningslagret i griparen. När endast 5 volt appliceras värms dessa spår precis tillräckligt för att driva PNIPAM-lagret över dess övergångstemperatur, vilket gör att det drar ihop sig och böjer sig. Omsorgsfulla elektriska mätningar visar att kombinationen av joner från zinkklorid och den ledande polymeren skapar både joniska och elektroniska ledningsvägar som effektivt omvandlar elektrisk effekt till lokal värme, samtidigt som hela strukturen förblir lika mjuk och töjbar som resten av griparen. Avgörande är att vattnet bara en centimeter från enheten bara värms något, vilket visar att värmen mestadels hålls kvar i själva aktuatorn. Denna riktade uppvärmning minskar energianvändningen och gör systemet säkrare för kontakt med biologisk vävnad eller temperaturkänsliga varor.
3D-printad robothand som vet när den ska släppa
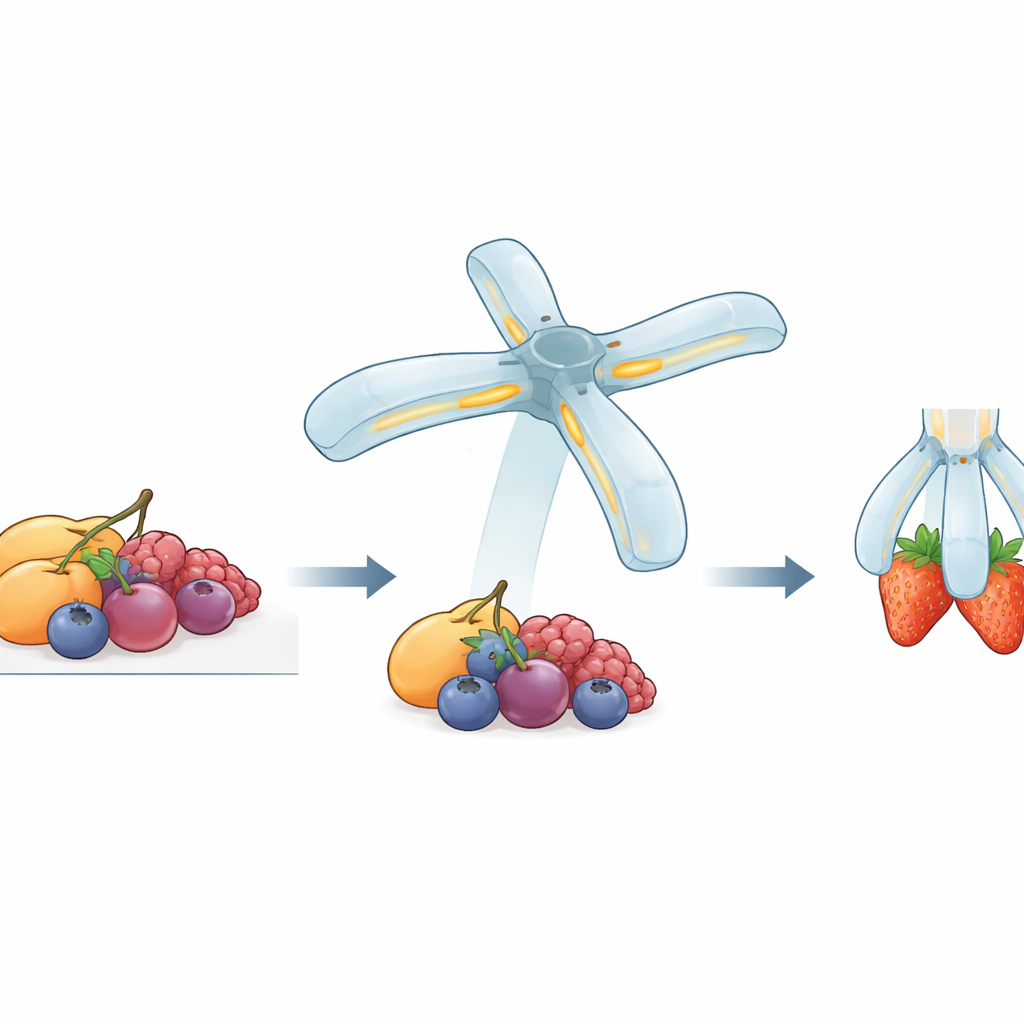
Eftersom de packade mikrogel-inksen flyter under tryck men snabbt stelnar igen kan de 3D-printas i skräddarsydda former. Författarna skriver ut ett korsformat, handflatsstort gripverktyg vars fingrar vardera innehåller ett rörligt PNIPAM-lager, ett sensorlager och en central värmeled. Genom att finjustera printmönster och tjocklek når de böjvinklar på upp till 180 grader samtidigt som materialet hålls extremt mjukt (Shore-hårdhet under 10 A) och effektförbrukningen omkring 2 watt. Det inbyggda sensorlagret omvandlar fingerböjning och kontakt med ett föremål till en förändring i elektrisk resistans. Kopplat till en enkel styrenhet och en robotarm används denna signal för sluten styrning: griparen värms, krullar sig runt ett föremål, känner igen när den greppat något av rätt storlek genom storleken på resistansändringen och talar sedan om för armen när den ska lyfta eller släppa.
Sortera frukt med känsel
För att visa vad denna somatosensoriska förmåga kan göra testar forskarna griparen på en blandning av jordgubbar, druvor och apelsiner. Ett gripverktyg som väger omkring 35 gram kan lyfta föremål upp till ungefär tre gånger sin egen vikt. Viktigare är att mönstret i sensorsignalen skiljer sig beroende på fruktens storlek: små jordgubbar orsakar större böjning och därmed en större resistansförändring än en klase druvor eller en apelsin. Genom att sätta en enkel tröskel kan styrenheten programmeras att fortsätta lyfta endast när ”jordgubbssignalen” uppträder och att släppa allt som är större. Detta möjliggör grundläggande objektigenkänning och sortering utan kameror eller komplexa algoritmer, med bara den mjuka kroppens egen känsla av deformation.
Vad detta betyder för framtida försiktiga maskiner
I vardagliga termer visar arbetet hur man bygger en mycket försiktig, energieffektiv robothand som kan känna vad den gör, med material som ligger närmare gelé än metall. Genom att väva in uppvärmning och sensing direkt i en mjuk, printbar hydrogel övervinner teamet långvariga nackdelar hos temperaturdrivna material och skrymmande mjuk-robotik-hårdvara. Resultatet är ett programmerbart, lågspännings-mjukt gripverktyg som kan lyfta känsliga föremål, avgöra vilka som ska behållas baserat på storlek och fungera i känsliga miljöer utan att överhetta dem. Sådana somatosensoriska mjuka robotar kan en dag hjälpa till inom automatiserad hantering av livsmedel, laboratorieautomation eller medicintekniska apparater där säker, varsam beröring är avgörande.
Citering: Georgopoulou, A., Aguiriano Calvo, M., Lucherini, L. et al. Programmable somatosensory soft robots. npj Flex Electron 10, 58 (2026). https://doi.org/10.1038/s41528-026-00558-0
Nyckelord: mjuk robotik, hydrogelaktuatorer, intelligenta gripverktyg, responsiva material, robotisk sensing