Clear Sky Science · tr
Su sürdürülebilir deniz atığı yönetimine yönelik sualtı enkaz örnek segmentasyonu ve sınıflandırması için uyarlanabilir hafif Mask R-CNN modeli
Su altındaki çöp temizliğinin neden önemli olduğu
Dalgaların çok altında, plastik şişeler, poşetler, balık ağları ve diğer atıklar deniz tabanında birikiyor ve kıyı sularında sürükleniyor. Bu görünmeyen çöp deniz yaşamına zarar veriyor ve okyanusların sağlığını izlemeyi zorlaştırıyor. Dalgıçlar, sualtı robotları ve uzaktan kameralar yardımcı olabilir, ancak öncelikle bulanık, renk tonlu suda çöpü net şekilde görüp tanıyabilmeleri gerekir. Bu çalışma, görüşün zayıf olduğu durumlarda bile sualtı robotlarının enkazı gerçek zamanlı olarak tespit etmesine, etrafını çizmesine ve sınıflandırmasına olanak tanıyan yeni bir bilgisayarlı görü sistemi sunuyor; bu, gelecekteki deniz temizleme çabaları için güçlü bir araç sağlıyor.
Denizde net görmekteki zorluklar
Sualtı sahneleri, havada çekilmiş görüntülerden çok daha zor yorumlanır. Işık su boyunca ilerledikçe önce kırmızı tonlar kaybolur, ardından diğer renkler silinir ve görüntüler mavi-yeşil tonların hakim olduğu bir görünüme bürünür. Asılı partiküller ışığı saçıp kontrastı düşürür ve bir sis perdesi ekler. Parlak, değişken bir deniz tabanına karşı soluk bir plastik poşeti bulmaya çalışan bir robot veya kamera için bu ciddi bir zorluktur. Basit kontrast ayarları gibi geleneksel görüntü düzeltmeleri biraz yardımcı olabilir, ancak derinlik, bulanıklık veya aydınlatma değiştikçe genellikle yetersiz kalırlar. Mevcut birçok derin öğrenme dedektörü ya enkazın sınırlarını doğru çizmeyi başaramıyor ya da otonom sualtı araçlarının taşıdığı küçük bilgisayarlarda çalışamayacak kadar ağırdır.
Sualtı çöpünü daha hızlı, daha hafif bir yöntemle bulmak
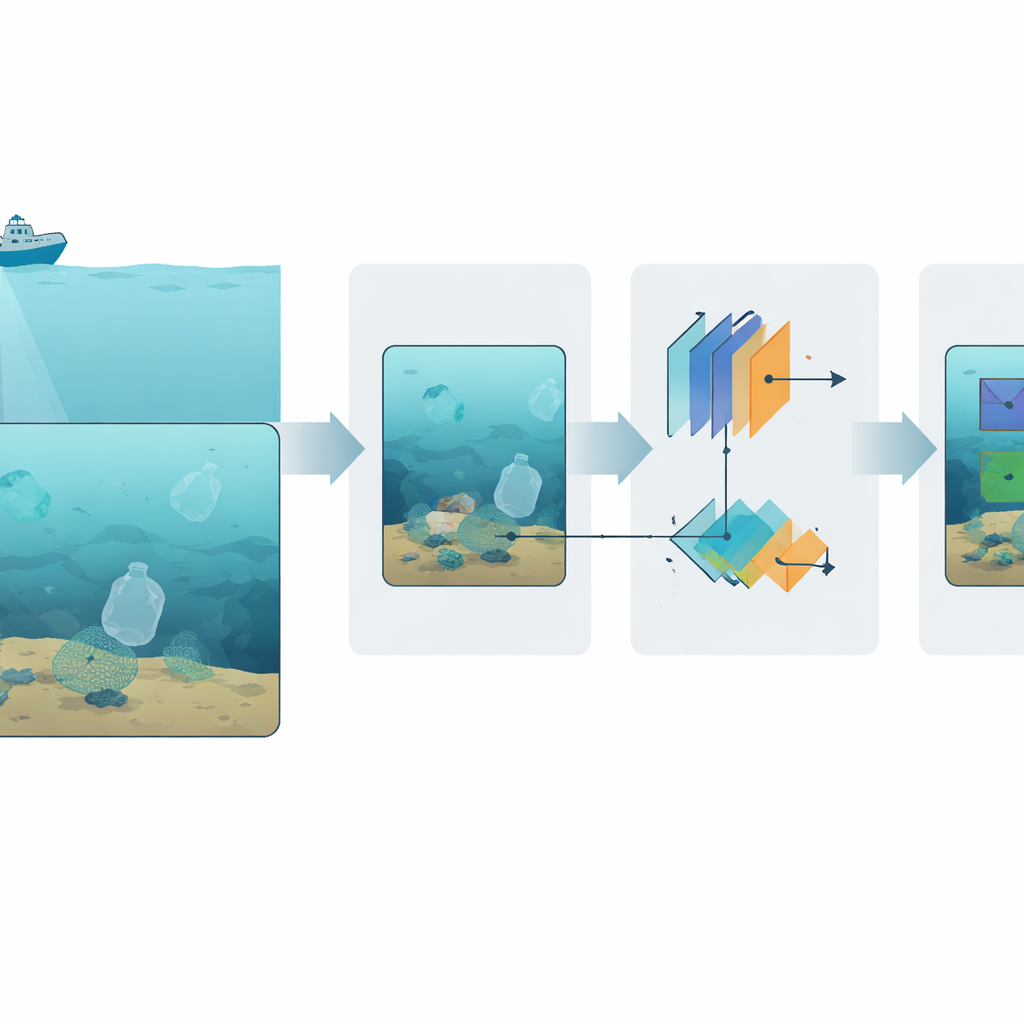
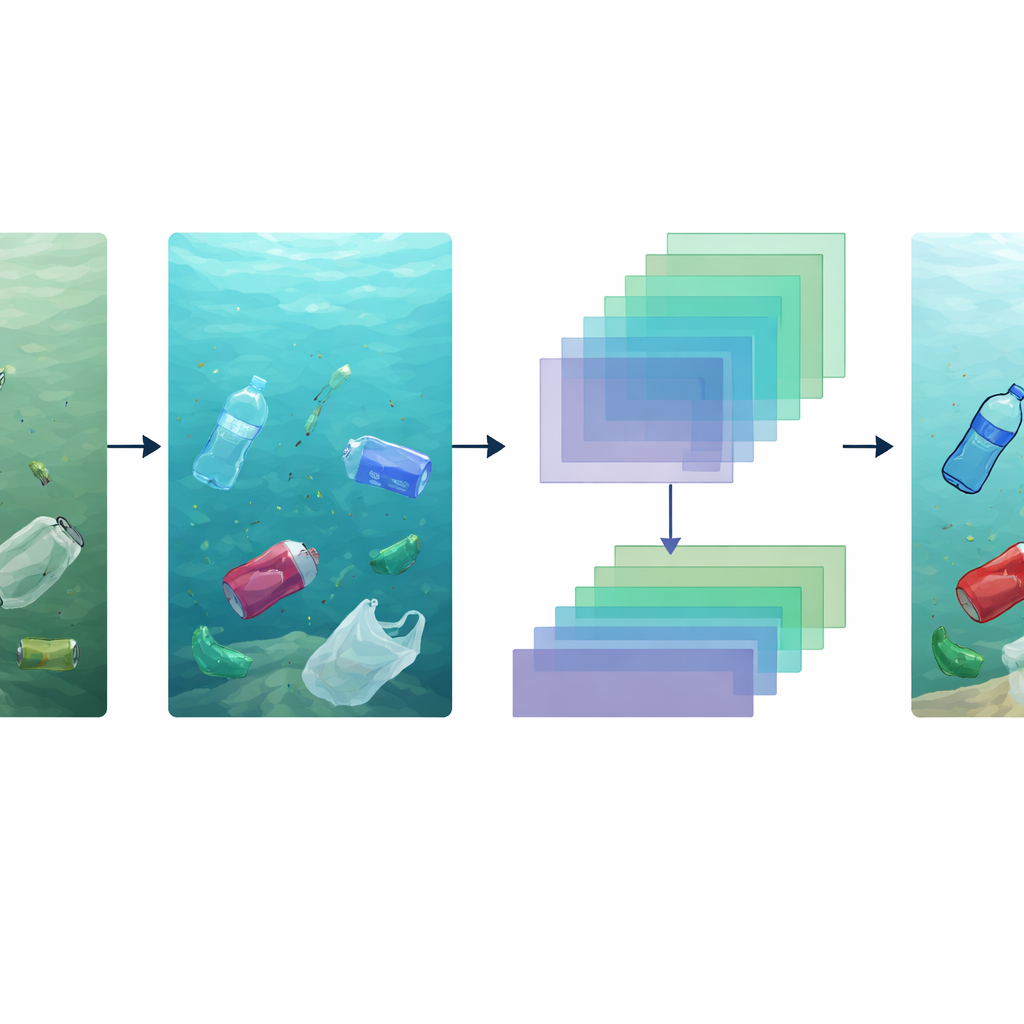
Yazarlar, bu zorlu ortama uyarlanmış "uyarlanabilir hafif Mask R-CNN" sistemi öneriyor. Yüksek düzeyde sistem basit bir zinciri izliyor: önce ham sualtı görüntüsünü temizliyor, ardından ana görsel desenleri çıkarıyor, olası enkaz bölgelerini öneriyor ve son olarak her çöp parçasının etrafına hassas siluetler çizip şişe, poşet veya ağ gibi bir kategori atıyor. Sistemi gerçek zamanlı kullanım için yeterince hızlı tutmak adına ana özellik çıkarıcı olarak kompakt ama yetenekli bir sinir ağı olan MobileNetV3'e dayanıyor. Bu omurga, karmaşık deniz tabanlarında yaygın olan küçük, düzensiz ve kısmen gizlenmiş enkazları bulmak üzere ayarlanmış iyileştirilmiş bir bölge öneri modülü ile eşleştirilmiş.
Bulanık görüntüleri daha doğal göstermek
Merkezi bir bileşen, tespitten önce çalışan özel bir iyileştirme modülüdür. Bu modül, farklı renklerin derinlikle nasıl sönüştüğüne dair bir model tarafından yönlendirilerek suyun ışık üzerindeki fiziksel etkilerini tersine çevirmeyi öğrenir. Bir konvolüsyonel sinir ağı ışığın suda ne kadar yol katettiğini ve her renk kanalının ne ölçüde absorbe edildiğini tahmin eder, ardından sahnenin daha net ve daha doğal görünen bir sürümünü yeniden inşa eder. Ek adımlar parlaklığı ayarlar, kontrastı gererek genişletir ve gürültüyü hafifçe azaltır; bunun sonucunda daha keskin kenarlara ve daha gerçekçi renklere sahip görüntüler elde edilir. Bu düzeltmeler, sistemin sonraki aşamalarının yoğun, düşük kontrastlı arka planlarda şişe, poşet ve diğer nesneleri ayırt etmesini çok daha kolay hale getirir.
Sistemin enkazın etrafını nasıl öğrendiği
Görüntü iyileştirildikten sonra MobileNetV3, çok ölçekli olarak şekilleri, dokuları ve renk desenlerini özetleyen çok katmanlı özellik haritaları yığınına dönüştürür. Geliştirilmiş bir öneri modülü, hem büyük ağları hem de küçük plastik parçacıkları işleyebilmek için bu ölçeklerden birkaçından gelen bilgileri birleştirir. Elle seçilmiş şablon boyutlarına güvenmek yerine, eğitim verilerinden ankraj (anchor) şekillerini öğrenir ve sahneyle en iyi eşleşenleri öne çıkararak yanlış alarmları azaltır. Her umut vadeden bölge için son bir dal, kenarlardaki ince ayrıntıları koruyan hassas bir örnekleme yöntemi kullanarak sınırları rafine eder. Sonuç, sadece kaba bir sınırlayıcı kutu değil, her nesnenin dış hatlarını izleyen bir maske olur; bu, ne kadar çöp olduğunu tahmin etmek veya robotik kavrama ve toplama planlamak için kritik önem taşır.
Gerçekçi koşullarda performansı kanıtlamak
Takım, sistemi güçlü sis, düşük ışık ve renk bozulması içeren zorlu sahneler de dahil olmak üzere birkaç sualtı enkaz görüntü kümesi üzerinde eğitip test etti. Gerçek dalışları taklit etmek için kontrast değişiklikleri, çeviriler ve bulanıklaştırmalar gibi veri artırma hileleri de kullandılar. İyileştirilmiş model yaklaşık %88 ortalama hassasiyet ve %83'ün üzerinde örtüşme skoru elde ederek standart bir Mask R-CNN ve YOLO varyantları gibi daha hızlı tek aşamalı dedektörleri geride bıraktı; üstelik yaklaşık 30 kare/saniye hızında çalıştı. Şişelerden poşetlere ve mikroplastiklere kadar farklı plastik türlerinde iyi performans gösterdi ve daha önce görülmemiş veri setlerinde ve yüksek bulanıklığa sahip sularda bile doğruluğunu korudu; bu da saha koşullarına uyum sağlayabileceğini gösteriyor.
Daha sağlıklı okyanuslar için bunun anlamı
Basitçe söylemek gerekirse, çalışma artık küçük sualtı robotlarının üzerinde gerçek zamanlı olarak sadece sualtı çöplerini bulmakla kalmayıp aynı zamanda bunları doğru şekilde çizebilen ve sınıflandırabilen kompakt görsel sistemler inşa etmenin mümkün olduğunu gösteriyor. Fizik-bilinçli görüntü temizlemeyi verimli bir tespit ve segmentasyon hattı ile birleştirerek önerilen yaklaşım hız ve hassasiyet arasında pratik bir denge kuruyor. Bu tür sistemler, enkaz sıcak noktalarını haritalayan, atığın akıntılarla nasıl hareket ettiğini izleyen ve hedefe yönelik temizlik operasyonlarına yardımcı olan gelecekteki otonom araç filolarını güçlendirebilir. Nadir enkaz türleri ve daha geniş su koşullarıyla başa çıkmak için daha fazla çalışma gerekse de bu araştırma, daha akıllı ve daha sürdürülebilir deniz atığı yönetimine doğru somut bir adımı işaret ediyor.
Atıf: Deluxni, N., Sudhakaran, P., Alroobaea, R. et al. Adaptive lightweight mask R-CNN model for underwater debris instance segmentation and classification towards sustainable marine waste management. Sci Rep 16, 14057 (2026). https://doi.org/10.1038/s41598-026-44542-0
Anahtar kelimeler: sualtı enkaz tespiti, deniz kirliliği, bilgisayarlı görü, özerk sualtı araçları, plastik atık