Clear Sky Science · ru
Адаптивная облегчённая модель Mask R-CNN для сегментации и классификации экземпляров подводного мусора в целях устойчивого управления морскими отходами
Почему важно убирать мусор под водой
Глубоко под волнами пластиковые бутылки, пакеты, рыболовные сети и другие отходы накапливаются на дне и дрейфуют в прибрежных водах. Эти невидимые завалы вредят морской жизни и усложняют мониторинг состояния океанов. Водолазы, подводные роботы и удалённые камеры могут помочь, но им прежде нужно уметь чётко видеть и распознавать мусор в мутной, окрашенной воде. В этом исследовании представлена новая система компьютерного зрения, которая позволяет подводным роботам обнаруживать, выделять контуры и классифицировать мусор в реальном времени даже при плохой видимости, предлагая мощный инструмент для будущих работ по очистке морей.
Трудности с видимостью под водой
Подводные сцены гораздо сложнее для интерпретации, чем снимки, сделанные в воздухе. По мере прохождения света через воду сначала исчезают красные тона, затем другие цвета, и изображения становятся доминируемо голубовато-зелёными. Взвешенные частицы рассеивают свет, понижают контраст и создают лёгкую дымку. Для робота или камеры, пытающейся найти бледный пластиковый пакет на ярком, меняющемся морском дне, это серьёзная проблема. Традиционные методы коррекции изображения, такие как простая регулировка контраста, могут помочь лишь частично и часто не справляются при изменении глубины, мутности или освещения. Многие существующие детекторы на базе глубокого обучения либо плохо выделяют контуры мусора, либо слишком «тяжёлые» для маломощных компьютеров, которые обычно используются на автономных подводных аппаратах.
Быстрее и легче: метод поиска подводного мусора
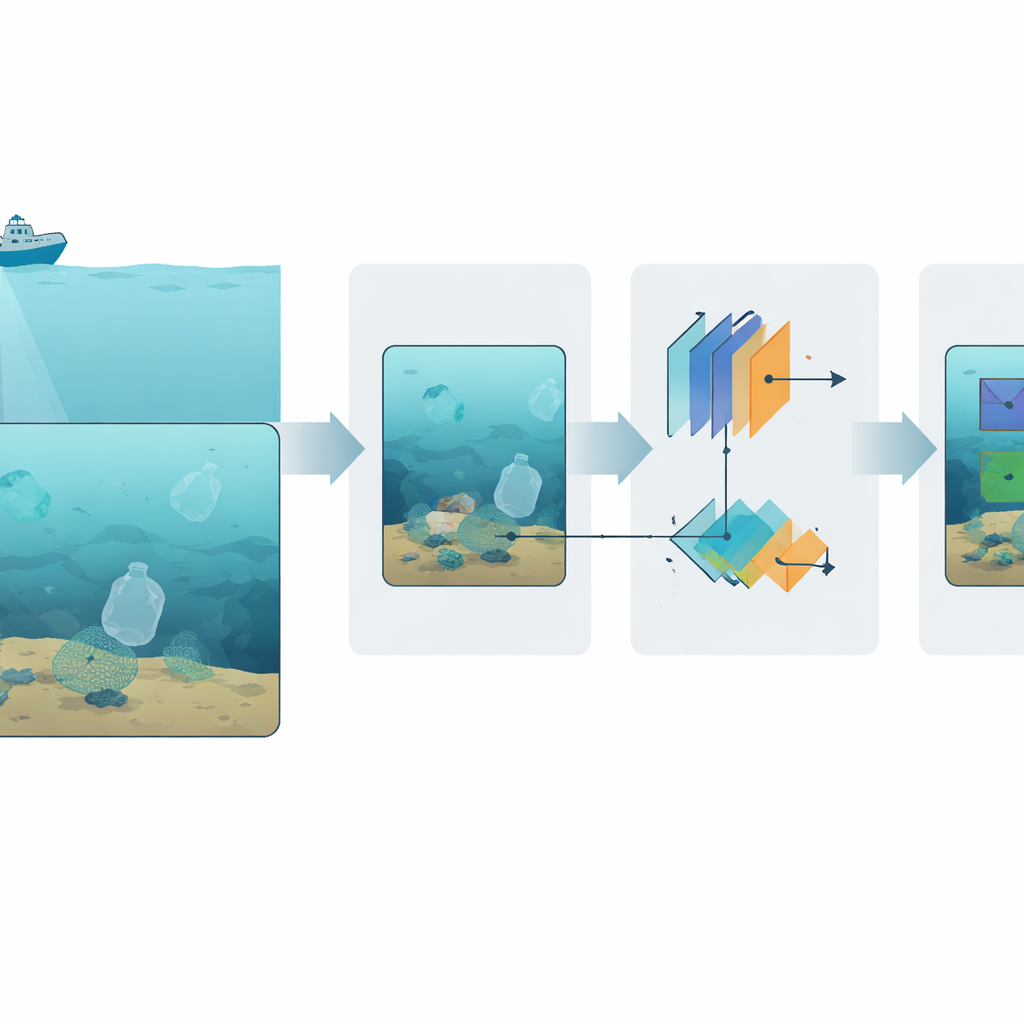
Авторы предлагают «адаптивную облегчённую» систему Mask R-CNN, настроенную на суровые условия под водой. В общих чертах система следует простой цепочке: сначала она улучшает исходное подводное изображение, затем извлекает ключевые визуальные признаки, затем предлагает вероятные регионы мусора и, наконец, рисует точные силуэты вокруг каждого фрагмента, одновременно относя его к категории — бутылка, пакет или сеть. Чтобы обеспечить достаточно высокую скорость для работы в реальном времени, система опирается на MobileNetV3 — компактную, но способную нейросеть — в качестве основного извлекателя признаков. Этот «каркас» дополняется усовершенствованным модулем предложения регионов, настроенным на поиск мелкого, неправильного и частично скрытого мусора, что типично для загромождённых морских донных участков.
Как сделать мутные изображения более естественными
Ключевой компонент — выделенный модуль усиления, работающий до этапа обнаружения. Этот модуль обучается обращать физические эффекты воды на свет, опираясь на модель того, как разные цвета выцветают с глубиной. Свёрточная нейросеть оценивает, как далеко прошёл свет через воду и насколько сильно поглощается каждый цветовой канал, затем реконструирует более ясную, естественно выглядящую версию сцены. Дополнительные этапы регулируют яркость, растягивают контраст и мягко снижают шум, в результате получаются изображения с более резкими краями и более реалистичными цветами. Эти коррекции значительно облегчают последующим этапам системы выделение бутылок, пакетов и других предметов на фоне загруженных, низкоконтрастных сцен.
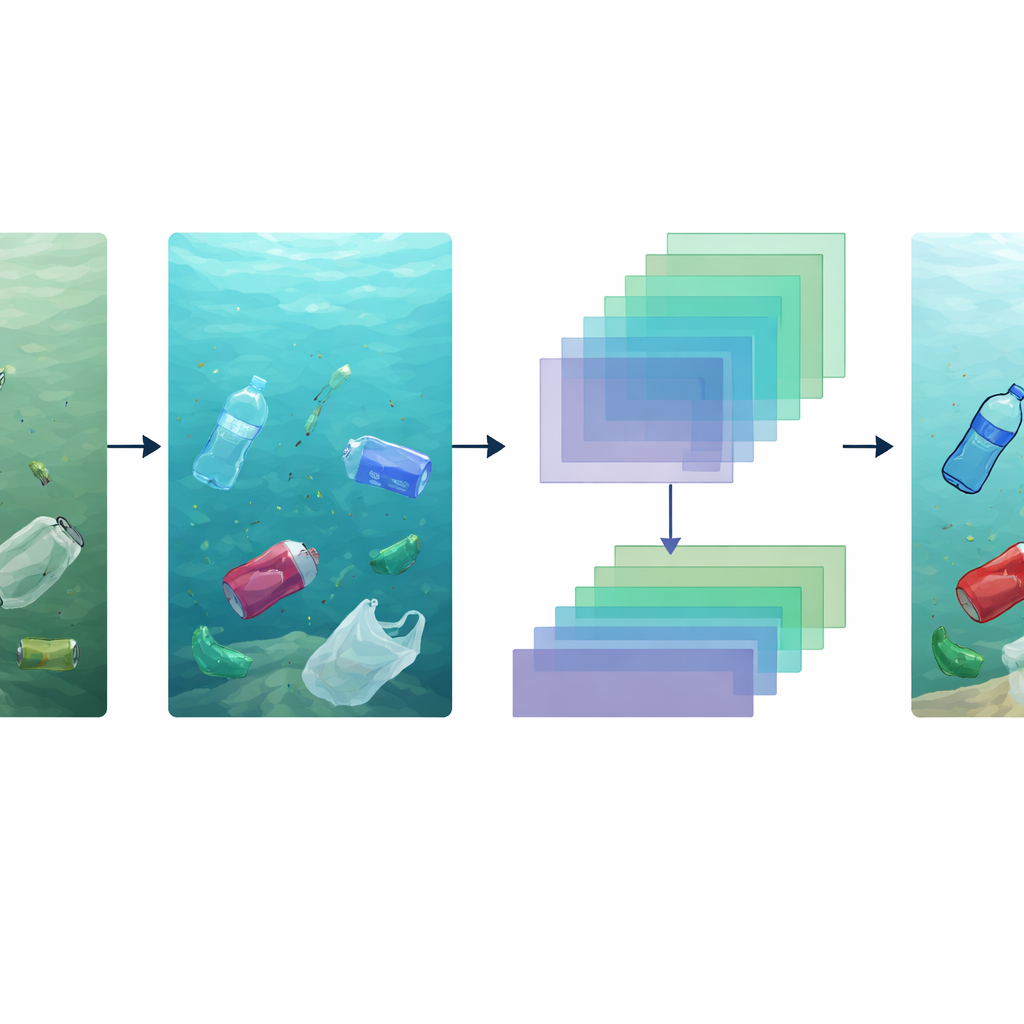
Как система учится выделять контуры мусора
После улучшения изображения MobileNetV3 преобразует его в набор карт признаков, суммирующих формы, текстуры и цветовые шаблоны на нескольких масштабах. Улучшенный модуль предложений объединяет информацию с нескольких таких масштабов, чтобы справляться как с большими сетями, так и с крохотными кусочками пластика. Вместо опоры на вручную подобранные шаблоны размеров он изучает формы якорей из тренировочных данных и акцентирует те, которые лучше всего соответствуют сцене, сокращая число ложных срабатываний. Для каждого перспективного региона конечная ветвь уточняет границы с помощью точного метода выборки, сохраняющего мелкие детали по краям. В результате получается маска, которая обводит контур каждого объекта, а не просто грубо ограничивает его прямоугольником — что критично при оценке количества мусора или планировании роботизированного захвата и сбора.
Подтверждение эффективности в реалистичных условиях
Команда обучала и тестировала систему на нескольких наборах изображений подводного мусора, включая сложные сцены с сильной дымкой, низкой освещённостью и искажением цвета. Чтобы имитировать реальные погружения, они также использовали приёмы увеличения данных, такие как изменение контраста, отражения и размытия. Улучшенная модель достигла средней точности (mean average precision) около 88% и коэффициента перекрытия выше 83%, превосходя как стандартный Mask R-CNN, так и более быстрые одношаговые детекторы вроде вариантов YOLO, при этом продолжая работать примерно на 30 кадрах в секунду. Модель хорошо показала себя на разных типах пластика — от бутылок и пакетов до микропластика — и сохраняла хорошую точность даже на ранее не встречавшихся наборах данных и в воде с высокой мутностью, что указывает на её способность адаптироваться к различным полевым условиям.
Что это значит для здоровых океанов
Проще говоря, исследование демонстрирует, что ныне возможно создать компактные системы зрения, которые не только находят подводный мусор, но и точно обводят и классифицируют его в реальном времени на борту малых подводных роботов. Комбинируя физически обоснованную очистку изображений с эффективным конвейером обнаружения и сегментации, предложенный подход достигает практического баланса между скоростью и точностью. Такие системы могут питать будущие флоты автономных аппаратов, которые будут картировать очаги мусора, отслеживать перемещение отходов по течениям и помогать в целевых операциях по очистке. Хотя необходима дальнейшая работа для обработки редких типов мусора и более широкого диапазона условий воды, это исследование представляет собой конкретный шаг к более умному и устойчивому управлению морскими отходами.
Цитирование: Deluxni, N., Sudhakaran, P., Alroobaea, R. et al. Adaptive lightweight mask R-CNN model for underwater debris instance segmentation and classification towards sustainable marine waste management. Sci Rep 16, 14057 (2026). https://doi.org/10.1038/s41598-026-44542-0
Ключевые слова: обнаружение подводного мусора, загрязнение моря, компьютерное зрение, автономные подводные аппараты, пластиковые отходы