Clear Sky Science · fr
Modèle Mask R-CNN adaptatif et léger pour la segmentation d’instances et la classification des déchets sous-marins en vue d’une gestion durable des déchets marins
Pourquoi il est important de nettoyer les déchets sous-marins
Bien en dessous des vagues, des bouteilles en plastique, des sacs, des filets de pêche et d’autres débris s’accumulent sur le fond marin et dérivent dans les eaux côtières. Ces déchets cachés nuisent à la vie marine et compliquent le suivi de l’état des océans. Les plongeurs, les robots sous-marins et les caméras à distance peuvent aider, mais ils doivent d’abord être capables de voir et de reconnaître clairement les déchets dans des eaux troubles et teintées. Cette étude présente un nouveau système de vision par ordinateur qui permet aux robots sous-marins de repérer, délimiter et classer les déchets en temps réel, même lorsque la visibilité est réduite, offrant un outil puissant pour les futures opérations de nettoyage marin.
Les difficultés de la vision sous-marine
Les scènes sous-marines sont beaucoup plus difficiles à interpréter que les images prises dans l’air. À mesure que la lumière traverse l’eau, les tons rouges disparaissent en premier, suivis par d’autres couleurs, laissant des images dominées par des nuances bleu-vert. Les particules en suspension diffusent la lumière, réduisent le contraste et ajoutent un voile brumeux. Pour un robot ou une caméra qui cherche un sac plastique pâle sur un fond marin lumineux et changeant, c’est un défi sérieux. Les corrections d’image traditionnelles, comme de simples ajustements de contraste, peuvent aider un peu, mais elles échouent souvent lorsque les conditions varient en fonction de la profondeur, de la turbidité ou de l’éclairage. De nombreux détecteurs profonds existants peinent à délimiter les déchets avec précision ou sont trop lourds pour fonctionner sur les petits ordinateurs embarqués par les véhicules sous-marins autonomes.
Une méthode plus rapide et plus légère pour repérer les déchets sous-marins
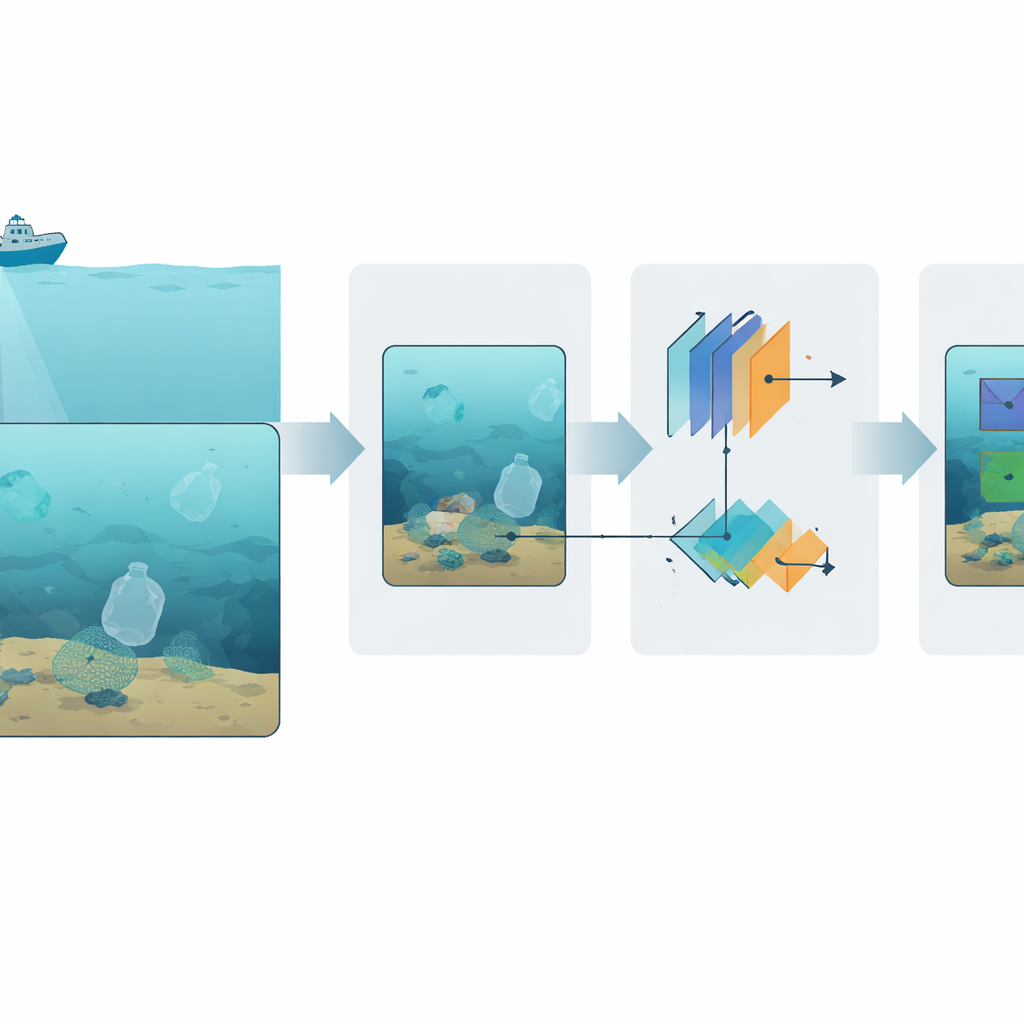
Les auteurs proposent un système « Mask R-CNN adaptatif et léger » conçu pour cet environnement hostile. À haut niveau, le système suit une chaîne simple : il nettoie d’abord l’image sous-marine brute, puis extrait les motifs visuels clés, propose des régions susceptibles de contenir des débris et enfin trace des silhouettes précises autour de chaque déchet tout en l’assignant à une catégorie telle que bouteille, sac ou filet. Pour maintenir la rapidité nécessaire à un usage en temps réel, il s’appuie sur MobileNetV3 — un réseau neuronal compact mais performant — comme extracteur de caractéristiques principal. Cette architecture est associée à un module amélioré de proposition de régions, adapté pour repérer les débris petits, irréguliers et partiellement cachés, situation courante sur les fonds encombrés.
Rendre les images troubles plus naturelles
Un ingrédient central est un module d’amélioration dédié qui opère avant la détection. Ce module est entraîné pour inverser les effets physiques de l’eau sur la lumière, guidé par un modèle de la façon dont les différentes couleurs s’atténuent avec la profondeur. Un réseau de neurones convolutionnel estime la distance parcourue par la lumière dans l’eau et l’absorption de chaque canal de couleur, puis reconstruit une version plus claire et d’aspect naturel de la scène. Des étapes supplémentaires ajustent la luminosité, étirent le contraste et réduisent légèrement le bruit, produisant des images aux contours plus nets et aux couleurs plus réalistes. Ces corrections facilitent grandement la détection ultérieure des bouteilles, sacs et autres objets sur des arrière-plans occupés et à faible contraste.
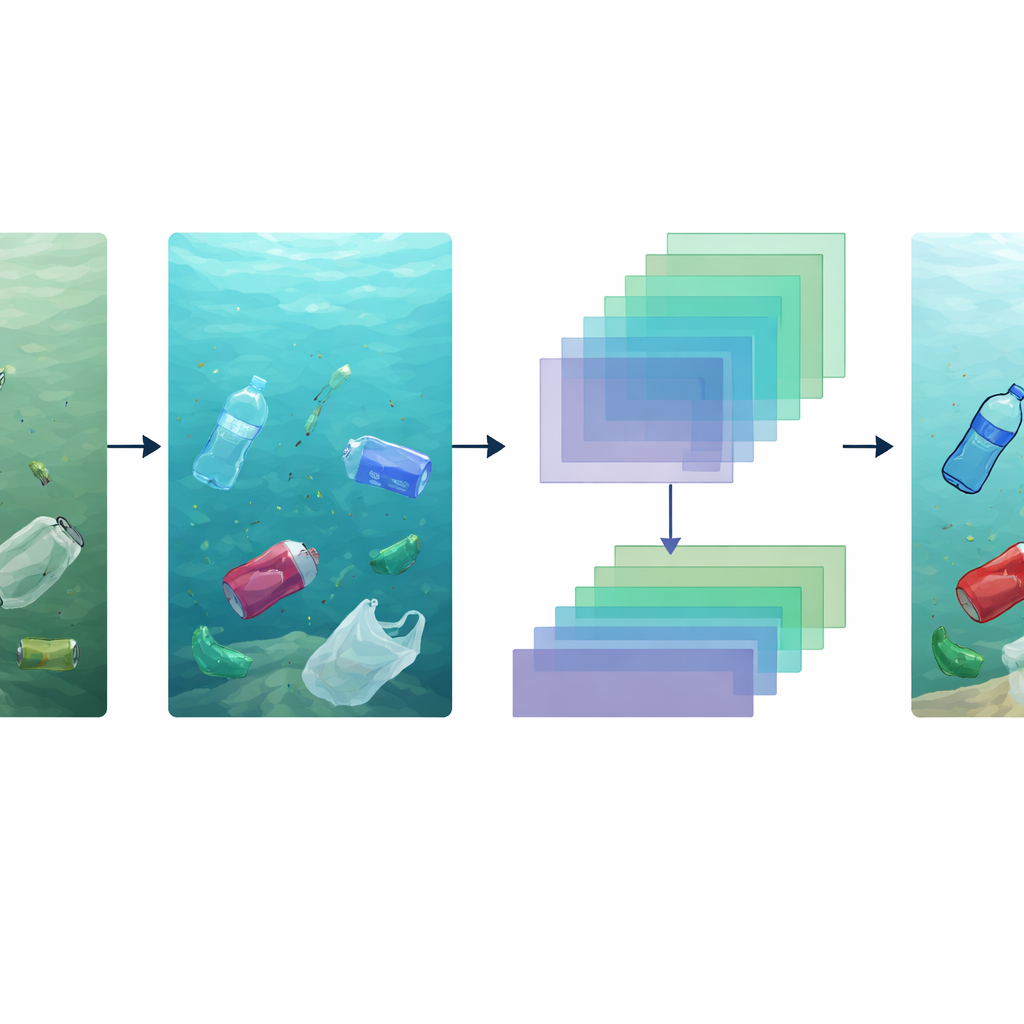
Comment le système apprend à délimiter les débris
Une fois l’image améliorée, MobileNetV3 la convertit en couches de cartes de caractéristiques qui résument formes, textures et motifs de couleur à plusieurs échelles. Un module de proposition amélioré fusionne l’information de plusieurs de ces échelles afin de traiter à la fois les grands filets et les petits fragments de plastique. Plutôt que de dépendre de tailles d’ancres choisies manuellement, il apprend les formes d’ancres à partir des données d’entraînement et met l’accent sur celles qui correspondent le mieux à la scène, réduisant les fausses alertes. Pour chaque région prometteuse, une branche finale affine les contours en utilisant une méthode d’échantillonnage précise qui préserve les détails fins le long des bords. Le résultat est un masque qui retrace le contour de chaque objet, et non une simple boîte englobante approximative, ce qui est crucial pour estimer la quantité de déchets ou planifier la préhension et la collecte robotisées.
Valider les performances en conditions réalistes
L’équipe a entraîné et testé le système sur plusieurs jeux d’images de déchets sous-marins, incluant des scènes difficiles avec forte brume, faible luminosité et distorsion des couleurs. Pour simuler des plongées réelles, ils ont également utilisé des techniques d’augmentation de données telles que variations de contraste, retournements et flous. Le modèle amélioré a atteint une précision moyenne (mAP) d’environ 88 % et un score de recouvrement supérieur à 83 %, surpassant à la fois un Mask R-CNN standard et des détecteurs rapides en une passe comme certaines variantes de YOLO, tout en tournant à environ 30 images par seconde. Il a bien performé sur différents types de plastiques — des bouteilles et sacs aux microplastiques — et a conservé une bonne précision même sur des jeux de données non vus auparavant et dans des eaux à forte turbidité, indiquant sa capacité d’adaptation à des conditions de terrain variées.
Ce que cela signifie pour des océans en meilleure santé
En termes simples, l’étude montre qu’il est désormais possible de construire des systèmes de vision compacts qui non seulement localisent les déchets sous-marins, mais les délimitent et les classent aussi avec précision en temps réel à bord de petits robots sous-marins. En combinant un nettoyage d’image informé par la physique avec une chaîne de détection et de segmentation efficace, l’approche proposée trouve un équilibre pratique entre vitesse et précision. De tels systèmes pourraient équiper de futures flottes de véhicules autonomes qui cartographient les zones à forte concentration de débris, suivent le déplacement des déchets avec les courants et aident aux opérations de nettoyage ciblées. Bien que des travaux supplémentaires soient nécessaires pour traiter des types de débris rares et une plus grande diversité de conditions d’eau, cette recherche constitue une étape concrète vers une gestion des déchets marins plus intelligente et plus durable.
Citation: Deluxni, N., Sudhakaran, P., Alroobaea, R. et al. Adaptive lightweight mask R-CNN model for underwater debris instance segmentation and classification towards sustainable marine waste management. Sci Rep 16, 14057 (2026). https://doi.org/10.1038/s41598-026-44542-0
Mots-clés: détection des déchets sous-marins, pollution marine, vision par ordinateur, véhicules sous-marins autonomes, déchets plastiques