Clear Sky Science · ja
海洋廃棄物の持続可能な管理に向けた水中ごみのインスタンス分割と分類のための適応型軽量Mask R-CNNモデル
水中のごみ回収が重要な理由
波のはるか下で、ペットボトル、袋、漁網などが海底にたまり、沿岸域を漂っています。この見えにくいごみは海洋生物に害を与え、海の健康を監視する妨げになります。ダイバーや水中ロボット、遠隔カメラが助けになりますが、まず濁った色つきの水中でごみをはっきりと検出・認識できることが必要です。本研究は、視界が悪い状況でも水中ロボットがごみをリアルタイムで検出、輪郭抽出、分類できる新しいコンピュータビジョンシステムを提案し、将来の海洋清掃活動に強力な道具を提供します。
海中で鮮明に見えない問題
水中の場面は、空気中で撮った写真よりもはるかに解釈が難しくなります。光が水中を進むとまず赤が失われ、次いで他の色が薄れ、結果として青緑系の色が支配的になります。浮遊粒子が光を散乱させ、コントラストを下げ、かすんだベールをかけます。明るく変化する海底を背景に淡いプラスチック袋を探すロボットやカメラにとって、これは大きな課題です。単純なコントラスト補正のような従来の画像改善は多少の助けになりますが、深度、濁度、照明が変化すると多くの場合うまく機能しません。既存の多くの深層学習検出器は、ごみの輪郭を正確に描けなかったり、自律型水中潜航機が搭載する小型計算機で動くには重すぎたりします。
水中ごみをより速く、軽く見つける方法
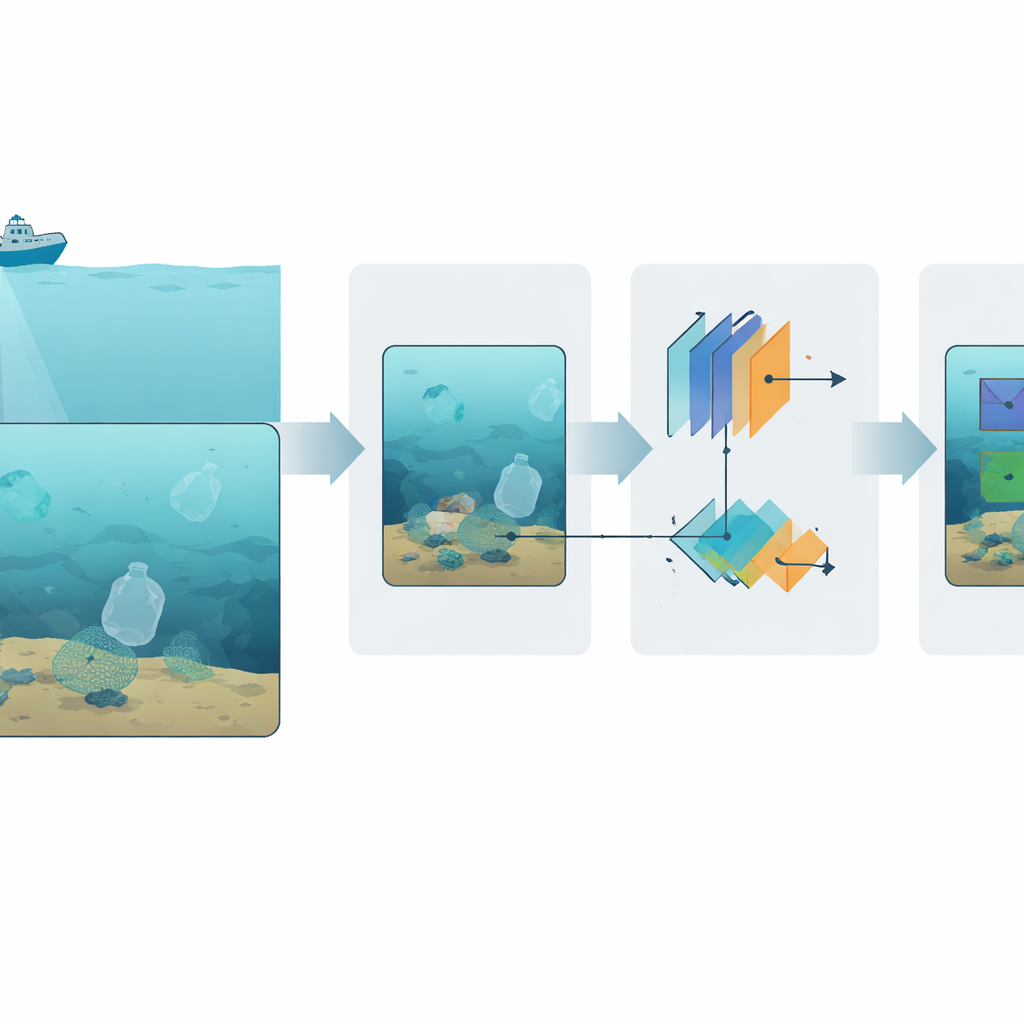
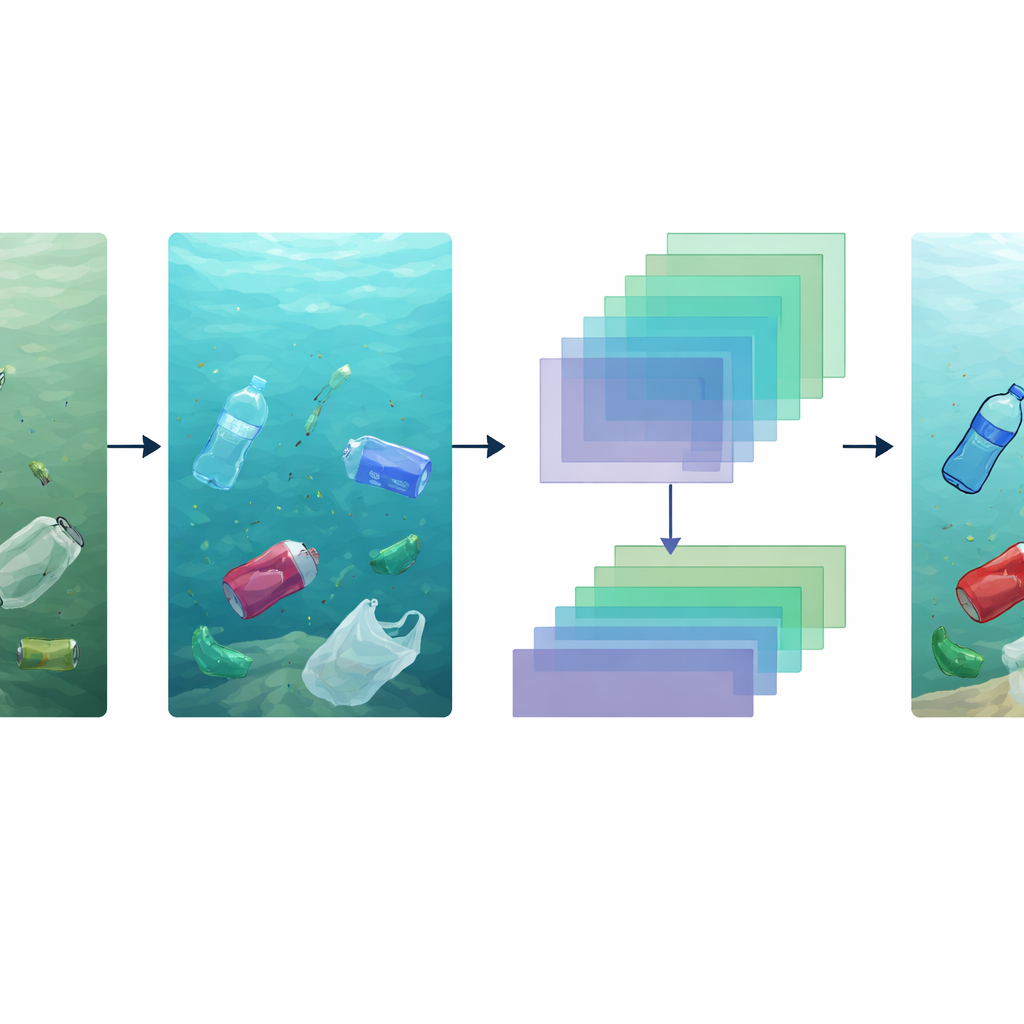
著者らは、この過酷な環境向けに「適応型軽量Mask R-CNN」システムを提案します。高レベルでは、システムは単純な連鎖をたどります。まず生の水中画像を補正し、次に主要な視覚パターンを抽出し、有力なごみ領域を提案し、最後に各ごみの正確な輪郭を描きつつ、ボトル、袋、網などのカテゴリに割り当てます。リアルタイム運用に十分な速さを保つため、特徴抽出の主要バックボーンとして小型ながら高性能なニューラルネットワークであるMobileNetV3を採用しています。このバックボーンは、小さく不規則で部分的に隠れたごみを見つけるよう調整された改良版領域提案モジュールと組み合わされ、散らかった海底での一般的な状況に対応します。
濁った画像をより自然に見せる
中心的な要素は検出の前に動作する専用の強調モジュールです。このモジュールは、深度による色の消失など水が光に与える物理的影響を逆転させるよう学習されます。畳み込みニューラルネットワークが光が水中をどれだけ進んだか、各色チャネルがどの程度吸収されたかを推定し、より鮮明で自然な見え方のシーンを再構築します。さらに明るさの調整、コントラストのストレッチ、ノイズの穏やかな低減といった処理を行い、輪郭が鋭くより現実的な色合いの画像を生成します。これらの補正により、後続の処理でボトルや袋などを忙しく低コントラストな背景から容易に識別できるようになります。
ごみの輪郭を学習する仕組み
画像が強調されると、MobileNetV3はそれを複数スケールで形状、質感、色パターンを要約する特徴マップのスタックに変換します。改良された提案モジュールはこれらのスケールの情報を融合し、大きな網から小さなプラスチック片まで処理できるようにします。手作業で選んだテンプレートサイズに頼る代わりに、学習データからアンカー形状を学習し、シーンに最も適合するものを重視して誤検出を抑えます。有望な各領域に対して、最終ブランチは輪郭沿いの細部を保持する精密なサンプリング手法で境界を洗練します。その結果得られるマスクは粗いバウンディングボックスではなく各物体の輪郭をたどるため、ごみの量を推定したりロボットによる把持・回収を計画したりする際に重要です。
現実的な条件で性能を検証
チームは強いかすみ、低照度、色歪みを伴う挑戦的な場面を含む複数の水中ごみ画像データセットでシステムを訓練・評価しました。実際の潜水を模擬するため、コントラスト変化、反転、ぼかしなどのデータ拡張も用いました。強調されたモデルは平均適合度(mAP)で約88%、オーバーラップスコアで83%超を達成し、標準的なMask R-CNNやYOLO系の単発検出器より優れた成績を示しつつ、約30フレーム/秒で動作しました。ボトルや袋からマイクロプラスチックまでさまざまなプラスチック種別で良好に機能し、未見のデータセットや高濁度水でも高い精度を保ち、実地条件の多様性に適応できることを示しています。
より健全な海のための意義
大まかに言えば、本研究は小型の水中ロボット上でリアルタイムに水中ごみを検出・輪郭抽出・分類できるコンパクトなビジョンシステムを構築できることを示しています。物理知識に基づく画像補正と効率的な検出・セグメンテーションパイプラインを組み合わせることで、速度と精度の実用的なバランスを実現しています。こうしたシステムは、漂着ごみのホットスポットをマップ化したり、ごみの流れを追跡したり、ターゲットを絞った清掃作業を支援する自律車両の将来の群れを支える可能性があります。希少なごみ種やより広範な水質条件への対応など追加の課題は残りますが、この研究はより賢明で持続可能な海洋廃棄物管理に向けた具体的な一歩を示しています。
引用: Deluxni, N., Sudhakaran, P., Alroobaea, R. et al. Adaptive lightweight mask R-CNN model for underwater debris instance segmentation and classification towards sustainable marine waste management. Sci Rep 16, 14057 (2026). https://doi.org/10.1038/s41598-026-44542-0
キーワード: 水中ごみ検出, 海洋汚染, コンピュータビジョン, 自律型水中潜航機, プラスチック廃棄物