Clear Sky Science · es
Modelo adaptable y ligero Mask R-CNN para la segmentación y clasificación de instancias de residuos submarinos hacia una gestión sostenible de desechos marinos
Por qué importa limpiar la basura submarina
Muy por debajo de las olas, botellas de plástico, bolsas, redes de pesca y otros desechos se acumulan en el lecho marino y flotan en aguas costeras. Esta basura oculta perjudica la vida marina y dificulta vigilar la salud de los océanos. Los buzos, robots submarinos y cámaras remotas pueden ayudar, pero primero deben ser capaces de ver y reconocer la basura con claridad en aguas turbias y teñidas. Este estudio presenta un nuevo sistema de visión por computador que permite a los robots submarinos detectar, delinear y clasificar residuos en tiempo real, incluso cuando la visibilidad es mala, ofreciendo una herramienta potente para futuros esfuerzos de limpieza marina.
Problemas para ver con claridad bajo el mar
Las escenas submarinas son mucho más difíciles de interpretar que las imágenes tomadas en aire. A medida que la luz viaja por el agua, los tonos rojos desaparecen primero, seguidos por otros colores, dejando imágenes dominadas por matices azul-verdosos. Las partículas en suspensión dispersan la luz, reduciendo el contraste y añadiendo un velo brumoso. Para un robot o una cámara que intenta encontrar una bolsa de plástico pálida sobre un fondo marino brillante y cambiante, esto supone un reto serio. Las soluciones tradicionales de imagen, como ajustes simples de contraste, pueden ayudar un poco, pero a menudo fallan cuando las condiciones cambian con la profundidad, la turbidez o la iluminación. Muchos detectores basados en aprendizaje profundo existentes o bien tienen dificultades para delinear los residuos con precisión o son demasiado pesados para funcionar en los ordenadores pequeños que suelen llevar los vehículos submarinos autónomos.
Una forma más rápida y ligera de detectar basura submarina
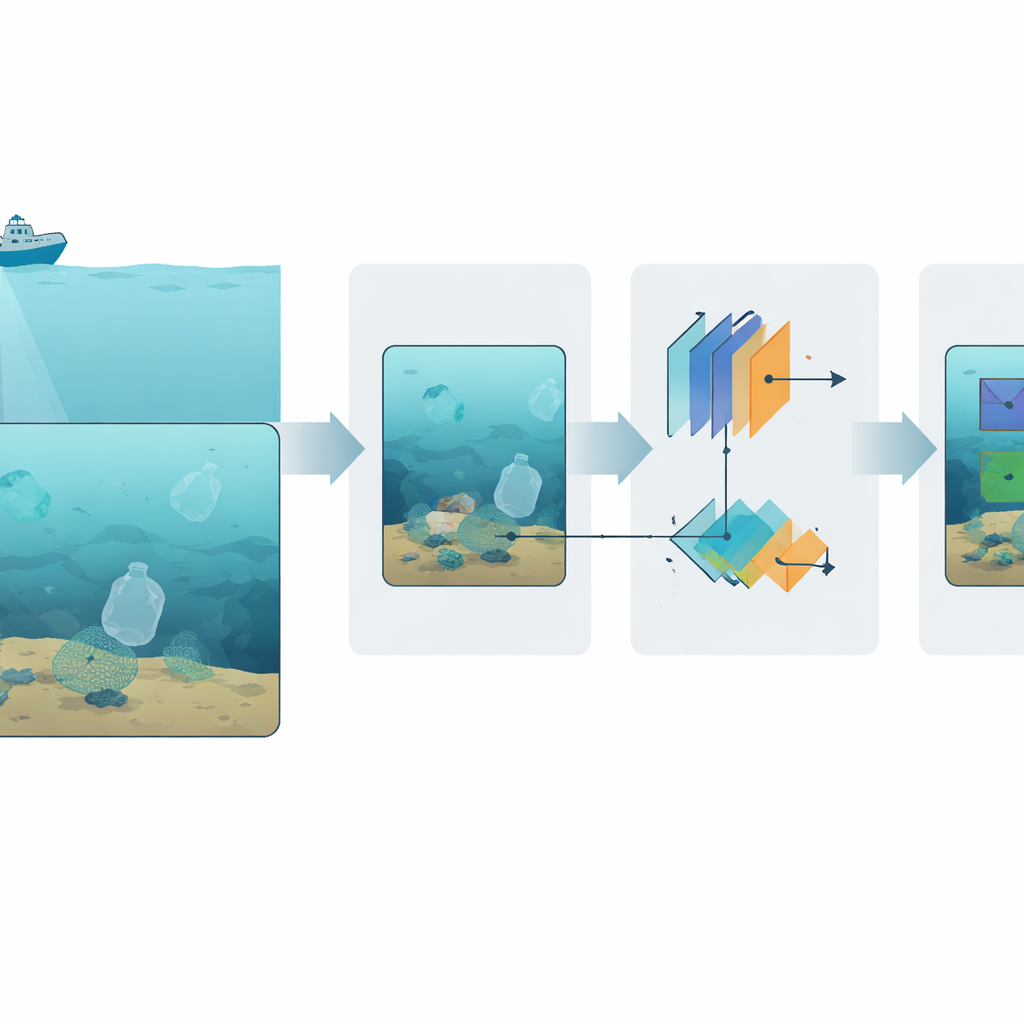
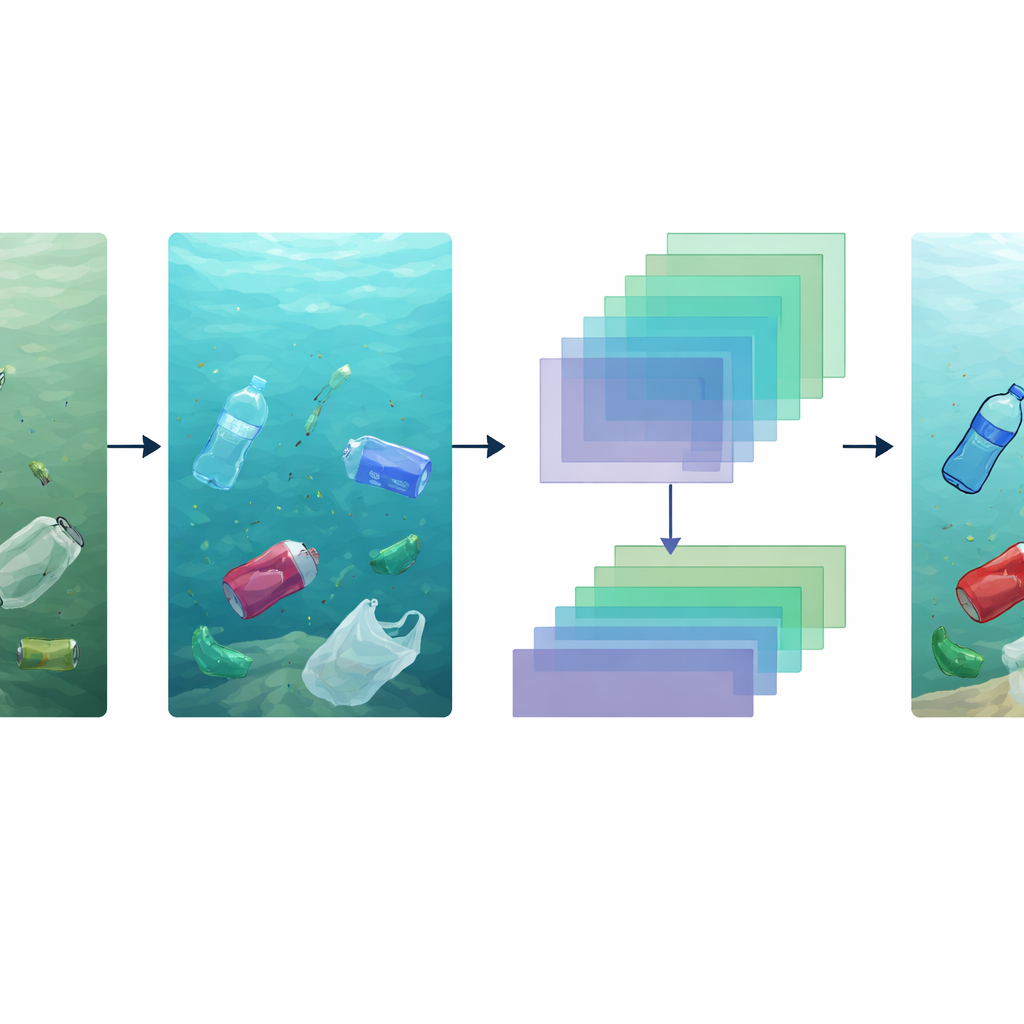
Los autores proponen un sistema “Mask R-CNN adaptable y ligero” diseñado para este entorno exigente. A grandes rasgos, el sistema sigue una cadena sencilla: primero limpia la imagen submarina cruda, luego extrae patrones visuales clave, propone regiones probables de residuos y finalmente dibuja siluetas precisas alrededor de cada trozo de basura mientras lo clasifica en categorías como botella, bolsa o red. Para mantener el sistema lo suficientemente rápido para uso en tiempo real, se apoya en MobileNetV3—una red neuronal compacta pero capaz—como extractor principal de características. Este backbone se empareja con un módulo de propuesta de regiones mejorado que está afinado para encontrar residuos pequeños, irregulares y parcialmente ocultos, una situación común en lechos marinos abarrotados.
Hacer que las imágenes turbias parezcan más naturales
Un ingrediente central es un módulo de mejora dedicado que opera antes de la detección. Este módulo se entrena para revertir los efectos físicos del agua sobre la luz, guiado por un modelo de cómo se desvanecen los diferentes colores con la profundidad. Una red neuronal convolucional estima qué distancia ha recorrido la luz a través del agua y cuánto se ha absorbido cada canal de color, y luego reconstruye una versión más clara y con apariencia más natural de la escena. Pasos adicionales ajustan el brillo, estiran el contraste y reducen suavemente el ruido, produciendo imágenes con bordes más nítidos y colores más realistas. Estas correcciones facilitan mucho que las etapas posteriores del sistema identifiquen botellas, bolsas y otros objetos frente a fondos complejos y de bajo contraste.
Cómo el sistema aprende a delinear los residuos
Una vez que la imagen está mejorada, MobileNetV3 la convierte en conjuntos de mapas de características que resumen formas, texturas y patrones de color a múltiples escalas. Un módulo de propuestas mejorado fusiona información de varias de estas escalas para poder manejar tanto redes grandes como diminutos fragmentos de plástico. En lugar de confiar en tamaños de plantilla escogidos a mano, aprende formas de ancla a partir de los datos de entrenamiento y enfatiza las que mejor coinciden con la escena, reduciendo las falsas alarmas. Para cada región prometedora, una rama final refina los contornos utilizando un método de muestreo preciso que preserva los detalles finos a lo largo de los bordes. El resultado es una máscara que traza el contorno de cada objeto, no solo una caja delimitadora burda, lo cual es crucial al estimar cuánto residuo hay o al planificar el agarre y la recolección robóticos.
Demostrando el rendimiento en condiciones realistas
El equipo entrenó y probó el sistema en varios conjuntos de imágenes de residuos submarinos, incluidas escenas desafiantes con fuerte neblina, poca luz y distorsión de color. Para imitar inmersiones reales, también emplearon trucos de aumento de datos como cambios de contraste, volteos y desenfoques. El modelo mejorado alcanzó una precisión media (mAP) de alrededor del 88% y una puntuación de solapamiento por encima del 83%, superando tanto a un Mask R-CNN estándar como a detectores de un solo paso más rápidos, como variantes de YOLO, mientras seguía funcionando a alrededor de 30 fotogramas por segundo. Tuvo buen desempeño en distintos tipos de plásticos—desde botellas y bolsas hasta microplásticos—y mantuvo una buena precisión incluso en conjuntos de datos no vistos anteriormente y en aguas de alta turbidez, lo que indica que puede adaptarse a variadas condiciones de campo.
Qué significa esto para océanos más saludables
En términos sencillos, el estudio muestra que ahora es posible construir sistemas de visión compactos que no solo encuentran basura submarina sino que también la delinean y clasifican con precisión en tiempo real a bordo de pequeños robots submarinos. Al combinar una limpieza de imagen consciente de la física con una canalización de detección y segmentación eficiente, el enfoque propuesto logra un equilibrio práctico entre velocidad y precisión. Tales sistemas podrían impulsar futuras flotas de vehículos autónomos que cartografíen puntos críticos de residuos, rastreen cómo se mueve la basura con las corrientes y ayuden en operaciones de limpieza dirigidas. Aunque se necesita más trabajo para lidiar con tipos de residuos raros y una gama más amplia de condiciones del agua, esta investigación marca un paso concreto hacia una gestión de desechos marinos más inteligente y sostenible.
Cita: Deluxni, N., Sudhakaran, P., Alroobaea, R. et al. Adaptive lightweight mask R-CNN model for underwater debris instance segmentation and classification towards sustainable marine waste management. Sci Rep 16, 14057 (2026). https://doi.org/10.1038/s41598-026-44542-0
Palabras clave: detección de residuos submarinos, contaminación marina, visión por computador, vehículos submarinos autónomos, residuos plásticos