Clear Sky Science · ar
نموذج Mask R-CNN خفيف وقابل للتكيّف لتقسيم وتصنيف حطام تحت الماء بهدف إدارة نفايات بحرية مستدامة
لماذا تهم عملية تنظيف القمامة تحت الماء
في أعماق ما تحت الأمواج، تتكدس زجاجات بلاستيكية وشنط وشباك صيد وغيرها من الحطام على قاع البحر وتنجرف في المياه الساحلية. تُلحق هذه النفايات الخفية ضرراً بالحياة البحرية وتجعل من الصعب مراقبة صحة المحيطات. يمكن للغواصين والروبوتات تحت الماء والكاميرات البعيدة المدى المساعدة، لكن أولاً يجب أن تكون قادرة على رؤية والتعرّف على القمامة بوضوح في مياه معكرة وملوّنة. تعرض هذه الدراسة نظام رؤية حاسوبية جديد يمكّن الروبوتات تحت الماء من رصد وتحديد محيط وتصنيف الحطام في الوقت الفعلي، حتى عند ضعف الرؤية، ما يوفر أداة قوية لجهود تنظيف البحار المستقبلية.
مشاكل الرؤية الواضحة تحت البحر
مشاهد تحت الماء أصعب بكثير في التفسير من الصور الملتقطة في الهواء. أثناء انتقال الضوء داخل الماء تختفي النغمات الحمراء أولاً، تليها ألوان أخرى، مما يجعل الصور تطغى عليها درجات الأزرق والأخضر. الجسيمات المعلقة تشتت الضوء، ما يخفض التباين ويضيف ستاراً ضبابياً. بالنسبة لروبوت أو كاميرا تحاول العثور على كيس بلاستيكي شاحب مقابل قاع بحري ساطع متغير، فهذا يمثل تحدياً كبيراً. تعديلات الصور التقليدية مثل ضبط التباين البسيط قد تساعد قليلاً، لكنها غالباً ما تفشل عندما تتغير الظروف مع العمق أو العكارة أو الإضاءة. العديد من كاشفات التعلم العميق الحالية تواجه صعوبة في تحديد محيط الحطام بدقة أو تكون ثقيلة جداً بحيث لا يمكن تشغيلها على الحواسيب الصغيرة التي تحملها المركبات تحت الماء الذاتية.
طريقة أسرع وأخف لرصد قمامة البحر
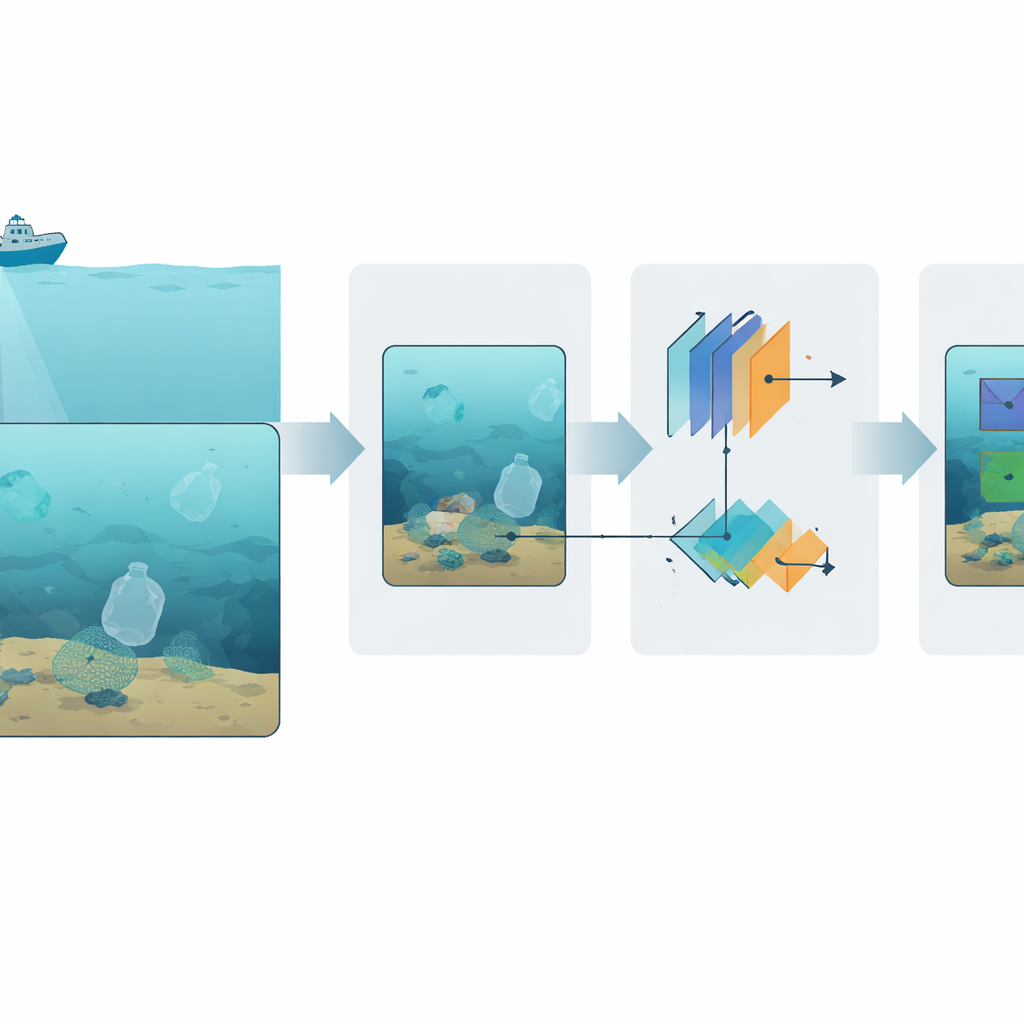
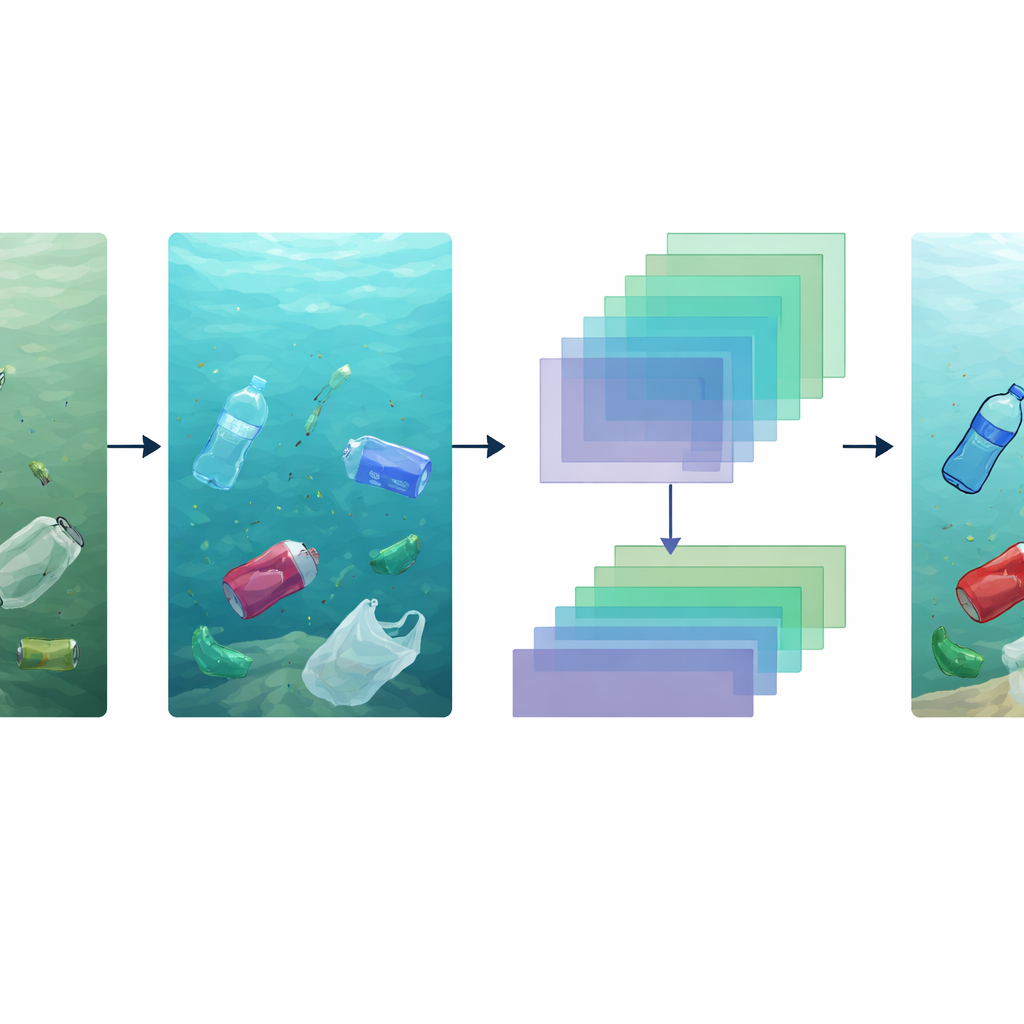
يقترح المؤلفون نظام «Mask R-CNN الخفيف والقابل للتكيّف» المصمم خصيصاً لهذا البيئة القاسية. على مستوى عالٍ، يتبع النظام سلسلة بسيطة: أولاً ينقح الصورة الخام تحت الماء، ثم يستخرج الأنماط البصرية الرئيسية، ثم يقترح مناطق محتملة للحطام وأخيراً يرسم محيطات دقيقة حول كل قطعة نفايات مع تصنيفها إلى فئات مثل زجاجة أو كيس أو شبكة. للحفاظ على سرعة كافية للاستخدام في الوقت الحقيقي، يعتمد على MobileNetV3—شبكة عصبية مدمجة لكنها فعالة—كمستخلص الخصائص الرئيسي. يقترن هذا العمود الفقري بوحدة اقتراح مناطق مطورة مهيأة لاكتشاف الحطام الصغير وغير المنتظم والمختبئ جزئياً، وهو وضع شائع على قيعان البحار المزدحمة.
جعل الصور المعكرة تبدو أكثر طبيعية
عنصر محوري هو وحدة تحسين مخصصة تعمل قبل الكشف. تم تدريب هذه الوحدة لعكس التأثيرات الفيزيائية للماء على الضوء، مسترشدة بنموذج لكيفية تلاشي الألوان المختلفة مع العمق. شبكة عصبية تلافيفية تُقدّر مدى سفر الضوء عبر الماء ومدى امتصاص كل قناة لونية، ثم تعيد بناء نسخة أوضح وأكثر طبيعية من المشهد. خطوات إضافية تضبط السطوع، وتمدد التباين وتقلل الضوضاء بلطف، مما ينتج صوراً ذات حواف أكثر حدة وألوان أكثر واقعية. تجعل هذه التصحيحات من الأسهل بكثير للمراحل اللاحقة في النظام تمييز الزجاجات والشنط والعناصر الأخرى أمام خلفيات مزدحمة ومنخفضة التباين.
كيف يتعلم النظام تحديد محيط الحطام
بمجرد تحسين الصورة، يحول MobileNetV3 الصورة إلى مجموعات من خرائط الميزات التي تلخص الأشكال والأنسجة وأنماط الألوان على مقاييس متعددة. تدمج وحدة الاقتراح المحسّنة المعلومات من عدة مقاييس حتى تتمكن من التعامل مع كل من الشبكات الكبيرة وقطع البلاستيك الصغيرة. بدلاً من الاعتماد على أحجام قوالب مختارة يدوياً، فإنها تتعلم أشكال المراسي من بيانات التدريب وتُعطي أولوية لتلك التي تتطابق أفضل مع المشهد، مما يقلل الإنذارات الكاذبة. لكل منطقة واعدة، يقوم فرع نهائي بتحسين الحدود باستخدام طريقة أخذ عينات دقيقة تحافظ على التفاصيل الدقيقة على الحواف. النتيجة قناع يتتبع محيط كل جسم، ليس مجرد صندوق احتواء تقريبي، وهو أمر حاسم عند تقدير كمية النفايات أو التخطيط للإمساك الآلي وجمعها.
إثبات الأداء في ظروف واقعية
درّب الفريق النظام واختبره على عدة مجموعات صور لحطام تحت الماء، بما في ذلك مشاهد صعبة ذات ضباب كثيف وإضاءة منخفضة وتشوه لوني. لمحاكاة الغطسات الحقيقية، استخدموا أيضاً حيل زيادة البيانات مثل تغييرات التباين والانعكاسات والطمس. حقق النموذج المحسّن متوسط دقة تقارب 88% ودرجة تراكب تفوق 83%، متفوقاً على كل من Mask R-CNN القياسي وكاشفات الصور الأحادية الأسرع مثل متغيرات YOLO، مع الاستمرار في العمل بمعدل نحو 30 إطاراً في الثانية. أداؤه كان جيداً عبر أنواع مختلفة من البلاستيك—من الزجاجات والشنط إلى الجسيمات الدقيقة—وحافظ على دقة جيدة حتى على مجموعات بيانات لم تُر من قبل وفي مياه عالية العكارة، مما يشير إلى قدرته على التكيّف مع ظروف ميدانية متنوعة.
ماذا يعني هذا لبحار أكثر صحة
بعبارات بسيطة، تُظهر الدراسة أنه أصبح بالإمكان بناء أنظمة رؤية مدمجة لا تكتفي بإيجاد القمامة تحت الماء بل تحدد محيطها وتُصنّفها بدقة في الوقت الحقيقي على متن روبوتات تحت الماء صغيرة. من خلال دمج تنظيف الصور الواعي بالفيزياء مع خط أنابيب كفؤ للكشف والتقسيم، يحقق النهج المقترح توازناً عملياً بين السرعة والدقة. يمكن لتلك الأنظمة أن تدعم أساطيل مستقبلية من المركبات الذاتية التي ترسم خرائط لبؤر الحطام، وتتبع كيفية تحرك النفايات مع التيارات وتساعد في عمليات تنظيف مستهدفة. وعلى الرغم من الحاجة لمزيد من العمل للتعامل مع أنواع نادرة من الحطام ونطاق أوسع من ظروف المياه، تمثل هذه الأبحاث خطوة ملموسة نحو إدارة نفايات بحرية أذكى وأكثر استدامة.
الاستشهاد: Deluxni, N., Sudhakaran, P., Alroobaea, R. et al. Adaptive lightweight mask R-CNN model for underwater debris instance segmentation and classification towards sustainable marine waste management. Sci Rep 16, 14057 (2026). https://doi.org/10.1038/s41598-026-44542-0
الكلمات المفتاحية: كشف الحطام تحت الماء, تلوث البحار, رؤية حاسوبية, مركبات تحت مائية ذاتية القيادة, نفايات بلاستيكية